



运放开环传输特性曲线
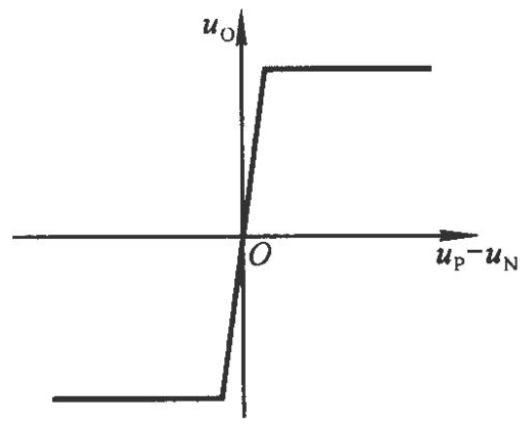
一、坐标轴含义
横轴:输入差值电压ui=up一uN(同相端与反相端电位差)
纵轴:输出电压uo
饱和区--------线性区---------饱和区
uo= Aod. (up -uN) Aod越大,线性区越小
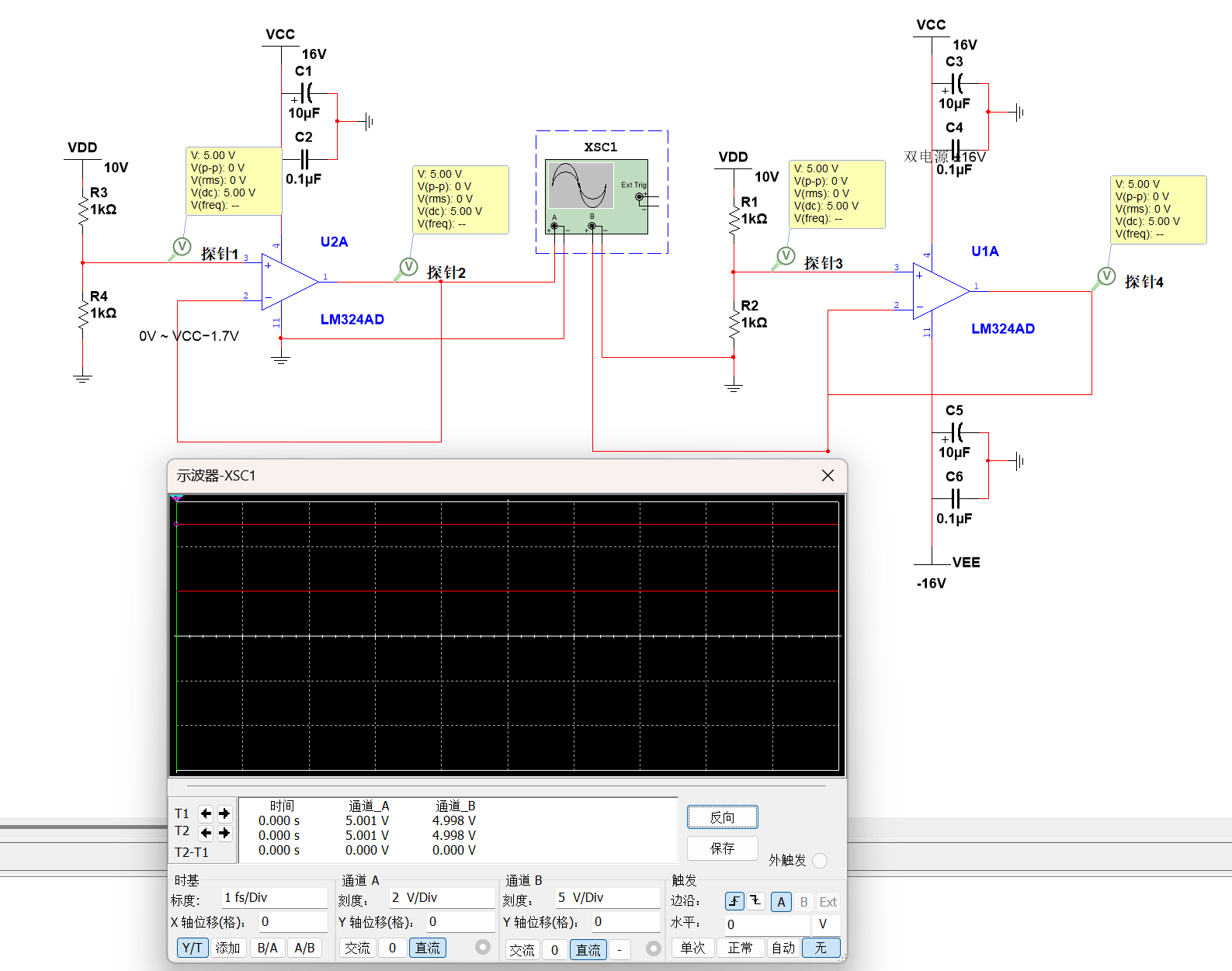
1.直流分压采样跟随器:重点看失调电压、偏置电流、CMVR、输出饱和压降
(一)失调电压
输出电压5.001V、4.998V和理论5V只差1~2mV,属于运放失调电压(Vos)典型范围(LM324典型失调 2mV以内),这个查手册吧,偏差数值很小,不影响电路功能,属于器件固有非理想特性,不是电路故障。
温漂
运放的失调电压Vos不是固定值,温度每升高一度,Vos就会跟着变大或者变小,这个变化量就是温漂。这个也是查手册就OK了。
产生原因:
运放输入级是一对匹配NPN差分放大管,制造工艺无法做到完全一致:
1.晶体管发射区面积、掺杂浓度微小差异;
2.基极、发射极导通压降VBE不完全相等;
3.输入级电阻阻值不对称。
这些不对称会等效成输入端自带一个微小“误差电压源”,就是失调电压。
解决方案
- 自带调零引脚运放:OP07、OP27、OP37,两个调零脚接10k电位器到正负电源,
OP07引脚定义:1脚调零、2脚反相输入、3脚同相输入、4脚负电源、6脚输出、7脚正电源、8脚调零。在1脚和8脚之间跨接一只10k电位器,电位器的滑动端接到运放的负电源。调节电位器可以改变运放内部差分对管的发射极电流,补偿输入失调电压,使空载输出归零。
上电拧到输出归零,只能抵消常温VOS,温度升高依然会飘。
(二)偏置电流
1.误差来源:输入偏置电流IB+、IB-运放输入级晶体管会持续流入微小电流: 无 R1/Rf 时:同相端只有信号源内阻Rs,反相端直接接输出(直流电阻≈0) 两支电流流过不等电阻,产生压差,输出自带固定直流偏移,也就是零点漂移
2.匹配抵消原理(R1=Rf) 同相端压降: V+error= IB+*R1 反相端压降: V-error=IB-*Rf 因R1=Rf,且IB+ 约等于IB-,两点直流误差电压几乎相等,虚短下直流偏移大幅消除交流信号不受影响,依旧 Vo= Vin
同相输入端的电流等于反相输入端的电流(不是这样的),两个电流就会在各自电阻上产生不相等的直流电压差,这个差值会被运放放大,输出出现零点漂移。让这两个电流各自产生的压降相等:得到没有误差的输出电压----电阻相等不能改变运放本身的偏置电流大小,只是给两路电流配相等负载(看看公式就欧克了)-----这是直流阻抗匹配,不是高频交流阻抗匹配,交流信号的增益、波形跟随特性完全不变
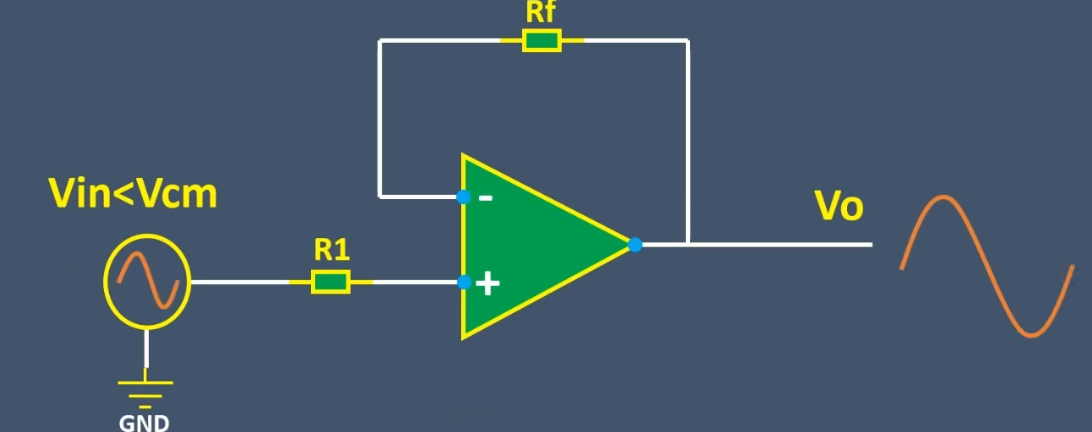
(三)CMVR共模电压范围
①共模电压CMVR=(V+ + V-)/2的电压是两个引脚共同抬到的对地电平。
把运放输入级比作一个水桶:
CMVR=水桶能装水的高度范围
共模电压Vcm=桶里水面高度
1.水面在桶的上下沿之间(Vcm在CMVR范围内):水桶正常用,水不会酒;运放线性工作,波形不变形。
2.水面超过桶上口(Vin大于CMVR上限):水漫出来;运放输入管子饱和,正弦波顶部直接削平、失真,严重时输出卡死不动。
3.水面低于桶底(Vin低于CMVR下限):桶底空了;运放输入管子截止,波形底部被切掉。
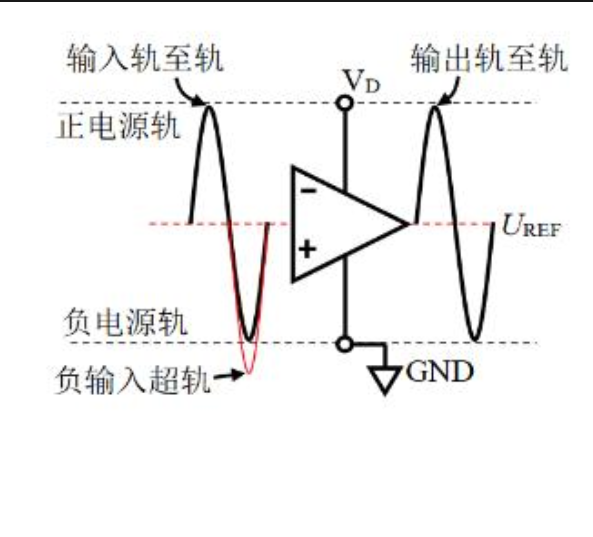
看运放手册的 CMVR 参数,输入信号全程卡在安全区间内就🆗了
![]()
单双电源的CMVR不一样,,VCM 必须落在 -0.3V ~ 32V 之间,芯片才不会损坏。
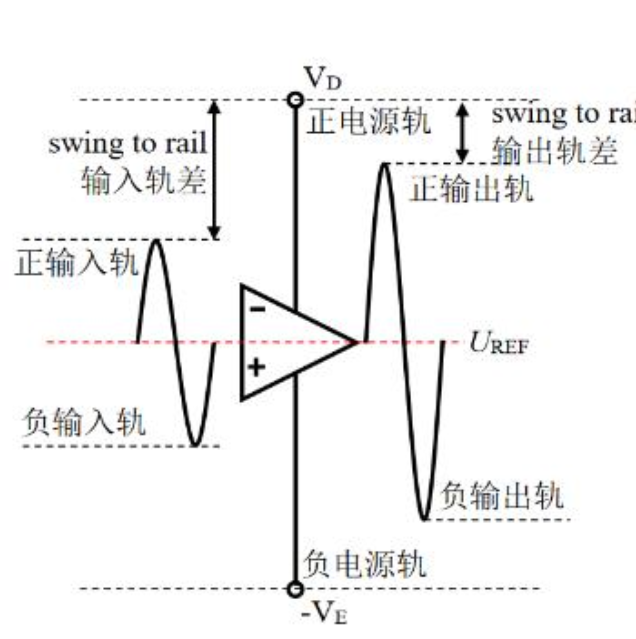
(四)饱和压降Vsat
运放内部输出是晶体管,晶体管导通时自身会吃掉一小段电压,这段被吃掉的电压,就叫饱和压降。
一句话定义饱和压降
输出电压永远到不了电源轨,和电源轨之间差的那一段电压,就是饱和压降。
·输出最高电压=正电源轨- 饱和压降
·输出最低电压=负电源轨+饱和压降
1.失调电压:运放内部器件不对称带来固有零点偏移,可通过调零电位器补偿,但无法消除温度带来的温漂。
2.偏置电流与阻抗匹配:运放正负输入端存在微小静态电流,通过设置等值匹配电阻R1=Rf,让两路电流产生的误差压降互相抵消,减小输出零点漂移。
3.CMVR共模电压范围:共模电压是两输入脚对地电压平均值VcM=(V+V_)/2,工作时VcM必须在手册给定区间内,否则输入波形失真锁死;跟随器输入信号直接等于共模电压,需重点留意。--------------- 区分电路:跟随器中VcM=Vim,输入信号直接等于共模电压,最容易超限;反相放大器Vcv≈0,几乎不受该参数限制。
4.饱和压降Vsat:运放输出管自身会消耗电压,实际输出峰值要扣除饱和压降才能达到,超出该幅值输出进入饱和区,信号被削顶失真。


















 4557
4557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










