











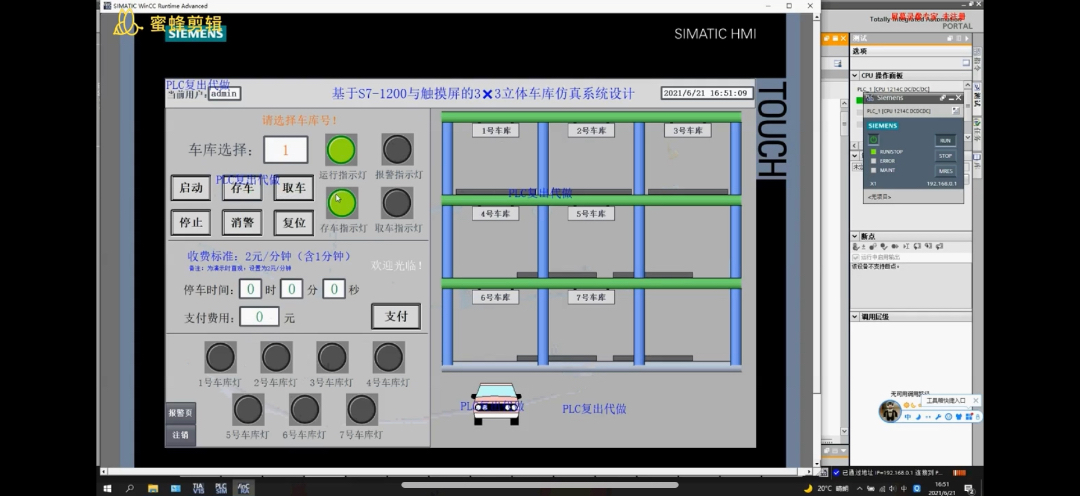
立体车库仿真运行,立体车库模拟运行,立体车库仿真模拟运行,基于西门子博图S7-1200plc与触摸屏HMI的3??3智能立体车库仿真控制系统设计,此设计为现成设计,模拟PLC与触摸屏HMI联机,博图版本V15或V15V以上,请安装好软件以及仿真器,本人不负责安装软件。 此设计包含PLC程序、触摸屏界面、PLC原理接线图、主电气接线图、流程图、IO表。
这个3x3立体车库仿真项目用S7-1200 PLC和HMI玩得有点意思。咱们先看车库结构,九宫格布局每个车位都能横向纵向移动,核心逻辑在于怎么让载车板像电梯一样精准到位。说真的,PLC程序里那个矩阵定位算法才是灵魂,下面这段代码展示了位置坐标转换:
// 车位矩阵坐标转换
#CurrentColumn := (POSITION - 1) / 3 + 1;
#CurrentRow := (POSITION - 1) MOD 3 + 1;
IF #TargetPosition > 0 THEN
#TargetColumn := (#TargetPosition - 1) / 3 + 1;
#TargetRow := (#TargetPosition - 1) MOD 3 + 1;
END_IF;这算法把1-9的车位编号拆成行列坐标,比如5号位对应(2,2)。实际运行中发现个坑——当载车板同时需要X/Y轴移动时,必须做路径仲裁。程序里用了优先级队列,Y轴电机比X轴晚0.5秒启动,防止两个方向同时动作撞车。

触摸屏界面设计得挺直观,九个车位状态用颜色区分:
- 绿色:空闲
- 红色:占用
- 黄色:正在存取
HMI变量直接绑定DB块数据,比如车位1的状态对应DB1.DBX0.0。但调试时发现个问题:直接读写DB地址会导致HMI刷新延迟,后来改用ARRAY[1..9] OF BOOL结构体才解决。
看这段电机控制逻辑,用到了S7-1200的PWM指令:
"X轴电机".PWM(
ENABLE := #X_Motor_Enable,
CYCLE := T#100ms,
PULSE := #X_Speed_Percent,
BUSY => #X_Motor_Busy);这里用脉宽调制控制电机转速,CYCLE参数设置成100ms周期,实际测试时发现周期太短会导致电机发热,调整到200ms后运行更稳定。速度百分比参数通过HMI的滑动条输入,范围0-100对应0-1500rpm。

仿真时最刺激的是异常处理模块。当光电传感器连续3秒没反馈信号,自动触发急停:
IF #Sensor_Timeout THEN
"Emergency_Stop"(REQ:=TRUE);
HMI_Alarm := 16#01; // 超时报警代码
RESET_MOTORS();
END_IF;但这个逻辑在真实场景可能需要加振动补偿,毕竟传感器偶尔会误报。仿真环境里倒是可以暴力测试——故意拔掉IO模拟线,看报警能不能及时触发。
整个项目的精髓在联调阶段。当HMI点击存车按钮时,背后的控制流是这样的:
- HMI发送车位请求到PLC的MB10寄存器
- PLC解析目标位置并计算路径
- 控制电机执行移动指令
- 实时更新HMI动画效果
最后说个骚操作:用PLCSIM Advanced和HMI仿真器联动调试,不需要真机就能看到载车板移动动画。虽然仿真速度和实际有差异,但用来验证逻辑流程绰绰有余。对了,千万别手贱在仿真时把循环中断时间改成10ms——博图分分钟卡到你怀疑人生。



 430
430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










