




一、问题背景
办公室只有一台打印机,却有好几台电脑需要打印文件,每次都要来回插拔数据线?不仅麻烦,还特别耽误工作。
其实,只要开启打印机共享,局域网内的多台电脑都能连接同一台打印机,实现多人共同使用。不管是家庭办公还是公司办公,都非常实用。
如果你还不知道如何设置打印机共享,别着急!下面教你一步一步完成设置,让所有电脑都能轻松打印。
二、解决方案
温馨提示:使用极智C盘清理优化系统环境
🔴 很多用户发现打印机共享失败后,会一直怀疑网络有问题,其实电脑系统垃圾过多、缓存文件堆积、Windows更新残留以及异常启动项,也可能影响打印服务(Print Spooler)正常运行,导致共享打印机连接异常、打印缓慢甚至无法识别设备。
✅建议先对电脑进行一次系统优化。可以使用【极智C盘清理免费版】进行深度扫描。
✅作为累计服务百万用户的专业电脑清理工具,它支持:
- · 系统垃圾清理
- · 软件残留清理
- · 临时文件清理
- · 浏览器缓存清理
- · 微信/QQ专清
- · 大文件清理
- · 重复文件查找
- · 内存加速
👉🏻【极智C盘清理免费版】官网:www.cpanx.com
👉🏻微软应用商店下载【极智C盘清理免费版】:https://apps.microsoft.com/detail/xp9cdzgzhm3x73?hl=zh-CN&gl=CN![]() https://apps.microsoft.com/detail/xp9cdzgzhm3x73?hl=zh-CN&gl=CN
https://apps.microsoft.com/detail/xp9cdzgzhm3x73?hl=zh-CN&gl=CN

操作步骤:
① 下载并安装极智C盘清理;
② 打开软件,点击【C盘清理】;

③ 扫描完成后系统会自动勾选需要清理的项目;
④ 点击【立即清理】即可。
清理完成后,系统运行会更加流畅,也能减少打印服务异常,提高打印机共享的稳定性。

方法一:开启打印机共享功能
首先,需要在连接打印机的主机电脑开启共享功能。
操作步骤:
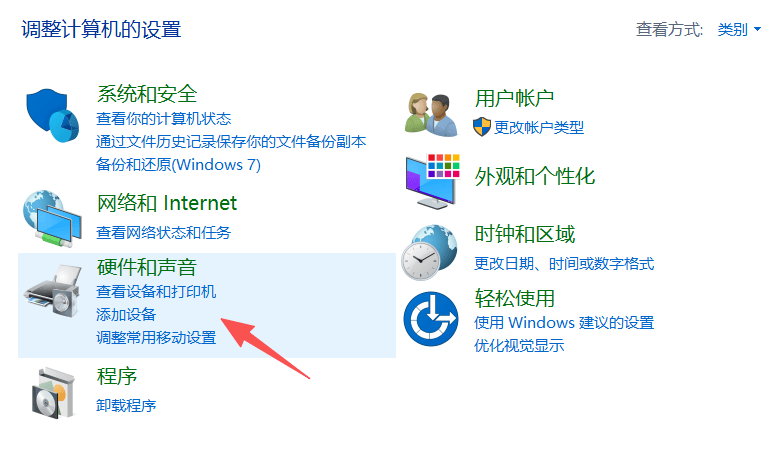
① 打开【控制面板】;
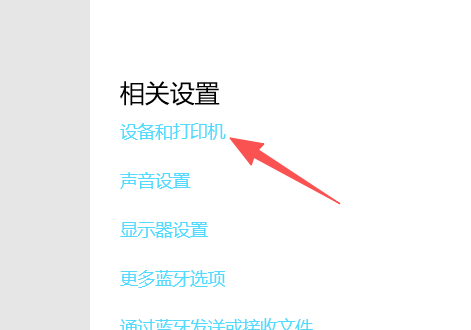
② 点击【设备和打印机】;
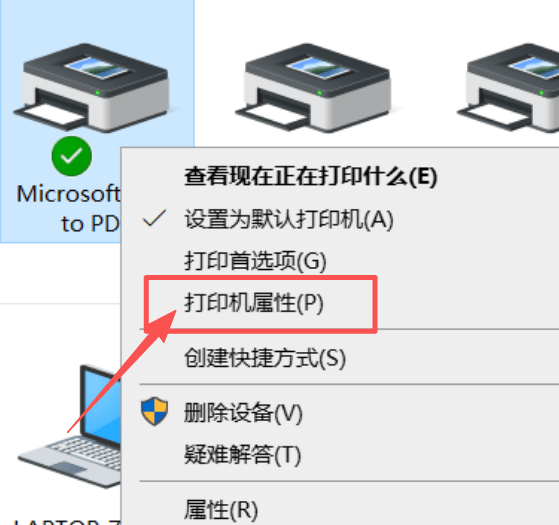
③ 找到需要共享的打印机;
④ 右键选择【打印机属性】;
⑤ 点击【共享】选项卡;
⑥ 勾选【共享这台打印机】;
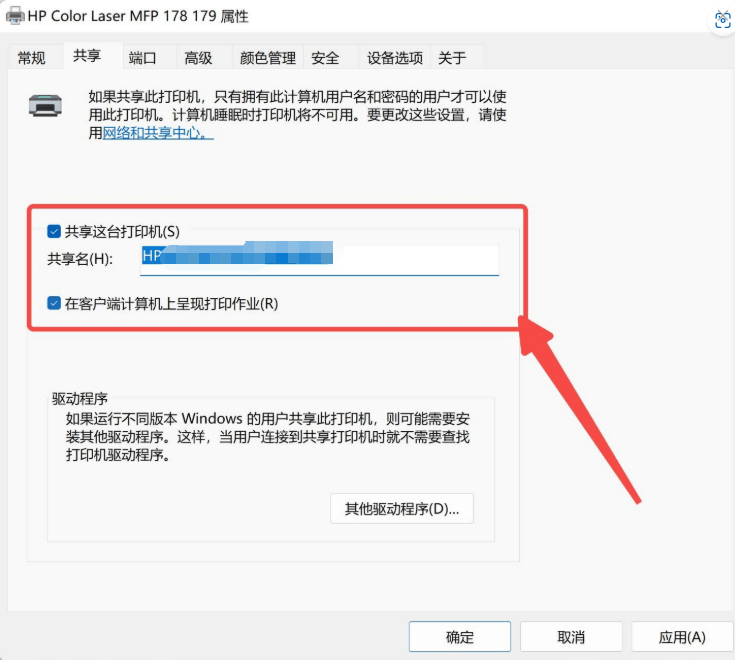
⑦ 设置一个简单易记的共享名称;
⑧ 点击【应用】和【确定】。
至此,打印机已经完成共享设置。
方法二:开启网络发现和文件共享
如果其他电脑无法找到共享打印机,大多数情况下是网络共享没有开启。
操作步骤:
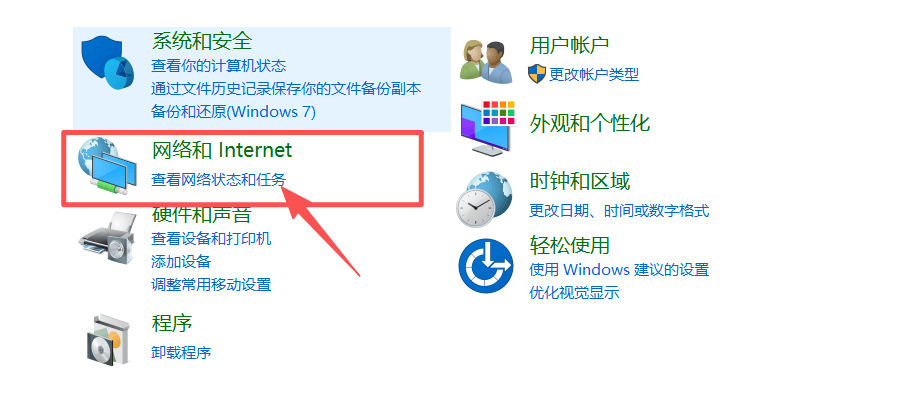
① 打开【控制面板】;
② 进入【网络和共享中心】;
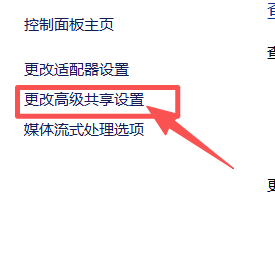
③ 点击【更改高级共享设置】;
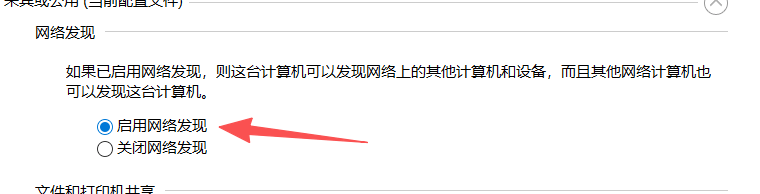
④ 开启【网络发现】;
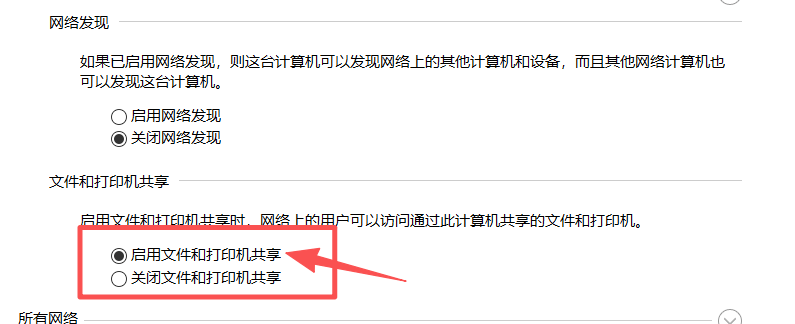
⑤ 开启【文件和打印机共享】;
⑥ 保存修改。
建议所有需要连接打印机的电脑都开启以上两项功能。
方法三:其他电脑连接共享打印机
打印机共享完成后,其它电脑即可进行连接。
操作步骤:
① 按下【Win+R】;
② 输入:\\主机电脑名称
或:\\主机IP地址
③ 按回车;
④ 找到共享的打印机;
⑤ 双击打印机;
⑥ 系统会自动安装驱动程序;
⑦ 等待安装完成即可开始打印。
如果提示没有驱动,可根据打印机品牌下载安装对应驱动。
方法四:通过添加打印机进行连接
如果直接访问共享打印机失败,也可以手动添加。
操作步骤:
① 打开【设置】;
② 点击【蓝牙和设备】;
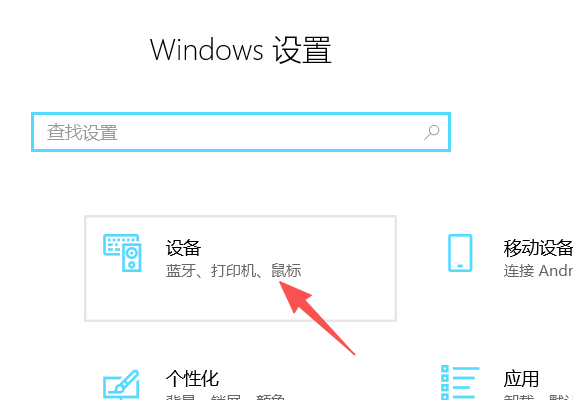
③ 进入【打印机和扫描仪】;
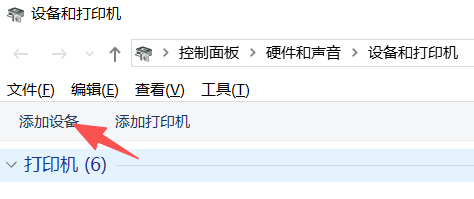
④ 点击【添加设备】;
⑤ 如果没有自动搜索到,选择【我需要的打印机不在列表中】;
⑥ 点击【按名称选择共享打印机】;
⑦ 输入:\\主机电脑名称\打印机共享名称
⑧ 点击【下一步】;
⑨ 按提示完成安装即可。
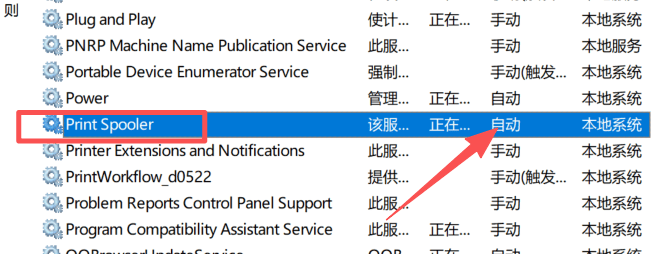
方法五:检查Print Spooler打印服务
如果共享设置都正确,却依旧无法打印,很可能是打印服务没有启动。
操作步骤:
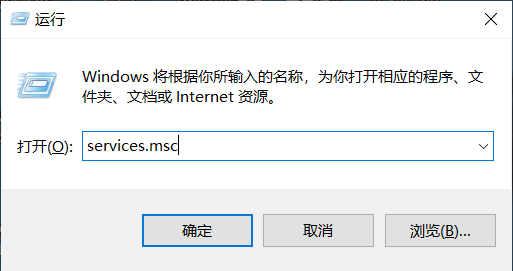
① 按【Win+R】;
② 输入【services.msc】;
③ 找到【Print Spooler】;
④ 双击打开;
⑤ 将启动类型设置为【自动】;
⑥ 点击【启动】;
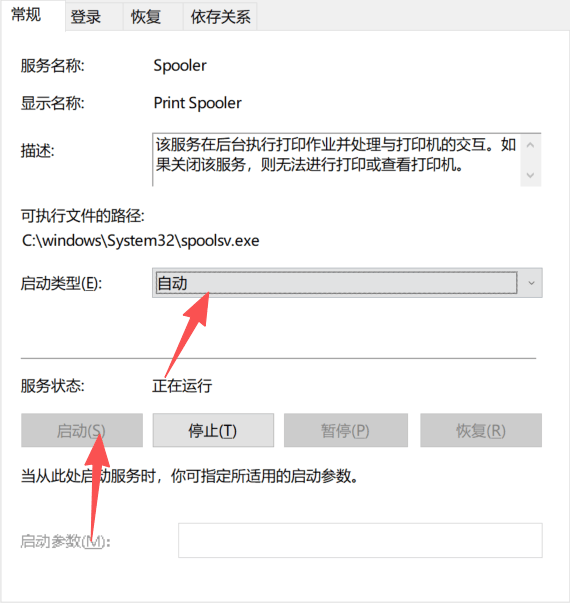
⑦ 点击【确定】。
重新连接打印机即可。
三、总结
打印机共享并不复杂,只要主机开启共享功能,并保证网络共享、打印服务正常运行,多台电脑就可以轻松连接同一台打印机。
建议按照下面的顺序进行排查:
【优化系统环境 → 开启打印机共享 → 开启网络发现 → 连接共享打印机 → 手动添加打印机 → 检查Print Spooler服务】
如果电脑长期没有清理系统垃圾,也建议定期使用极智C盘清理清理缓存、软件残留和Windows更新垃圾,保持系统稳定运行,减少打印服务异常,让打印更加顺畅。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










