



几年前我第一次搭建 WordPress 博客时,从购买服务器到配置环境,再到网站上线,足足折腾了两天。最近我想再建一个站,本以为又是一场硬仗,结果只用了 3 分钟就搞定了。
我没有成为技术大神,只是用对了工具——Sealos 云操作系统。
为什么是 WordPress?
WordPress 是全球最流行的内容管理系统,全球超过 40% 的网站都由它驱动。它拥有庞大的生态系统,无数的主题和插件让你可以轻松打造出任何类型的网站。
但是,它的强大也意味着部署上的不简单。
传统部署方式的“痛”
想要从零搭建一个 WordPress 网站,你需要扮演系统管理员、数据库管理员和 Web 开发者的多重角色:
1.搭建 LAMP/LEMP 环境:你必须在服务器上安装并配置一系列软件:Linux 操作系统、Apache 或 Nginx 网页服务器、MySQL 数据库以及 PHP 运行环境。
2.配置数据库:你需要手动创建一个 MySQL 数据库和用户,并赋予正确的权限,然后记住这些信息,填入 WordPress 的配置文件中。
3.处理文件权限:WordPress 需要对特定目录有写入权限才能安装主题、插件和上传媒体,处理 chmod 和 chown 命令常常让人头大。
4.配置 HTTPS:为了网站安全,你需要安装 SSL 证书并配置 HTTPS,这个过程又涉及到 Certbot 等工具,步骤繁琐。
整个过程下来,任何一步出错都可能导致网站无法访问,对于新手来说极不友好。
Sealos 的3分钟奇迹
Sealos 应用商店彻底颠覆了这个复杂的过程。它将 WordPress 和它所依赖的数据库打包成一个应用,实现了真正的一键部署。
第一步:进入 Sealos「应用商店」
登录 Sealos 桌面,点击“应用商店”图标。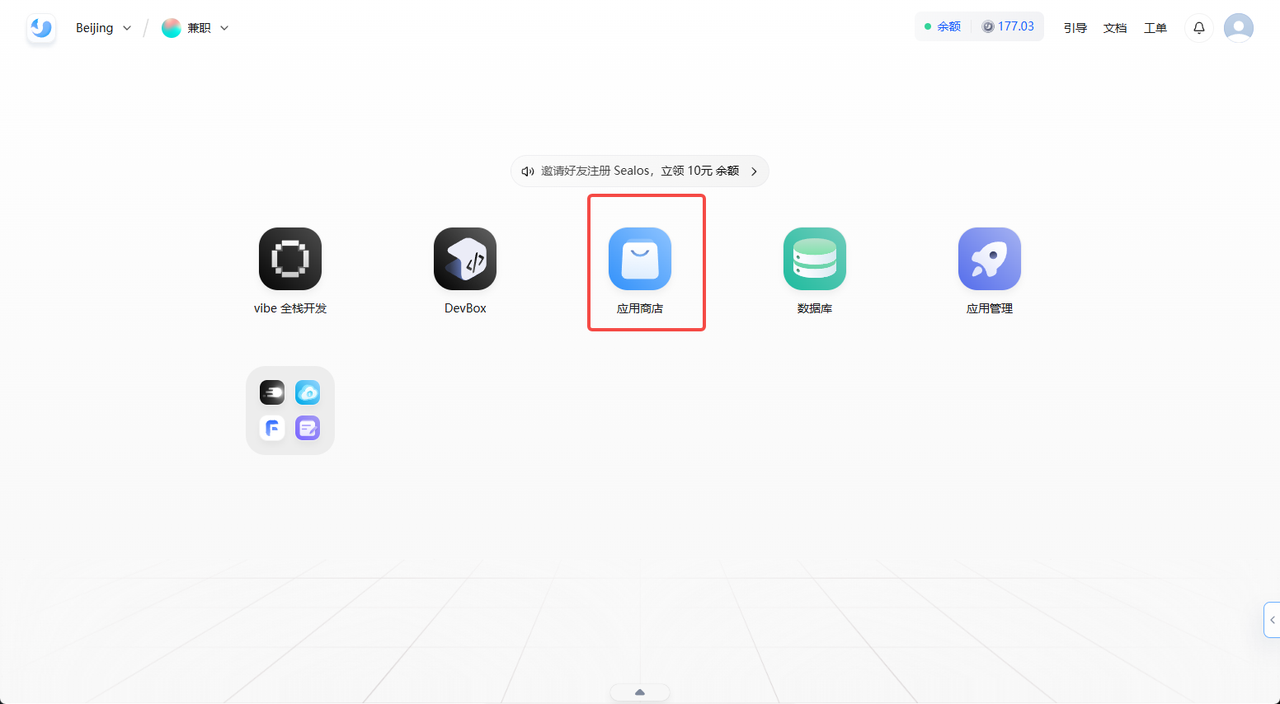
第二步:搜索「WordPress」
在搜索框输入 WordPress,选择官方推荐的应用。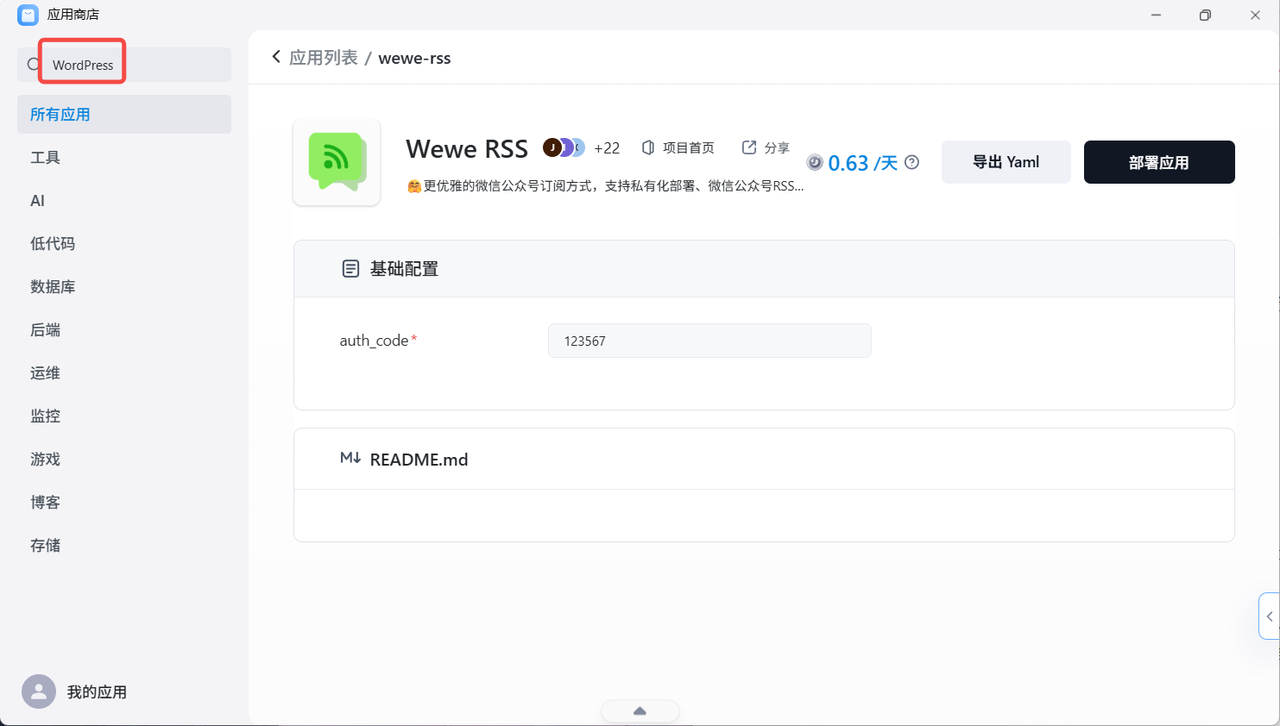
第三步:配置并部署
这是最关键的一步,但依然非常简单。在部署页面,Sealos 让我预先设置好几项信息:
-
管理员用户名
-
管理员密码
-
博客标题
我填好这些基础信息后,直接点击右上角的“部署应用”按钮。
第四步:等待奇迹发生
我几乎刚点击完部署,Sealos 的自动化系统就开始了工作。它在后台自动创建了数据库、配置好了连接、安装了 WordPress、并处理了所有网络和域名设置。不到3分钟,应用状态就显示为绿色的 Running。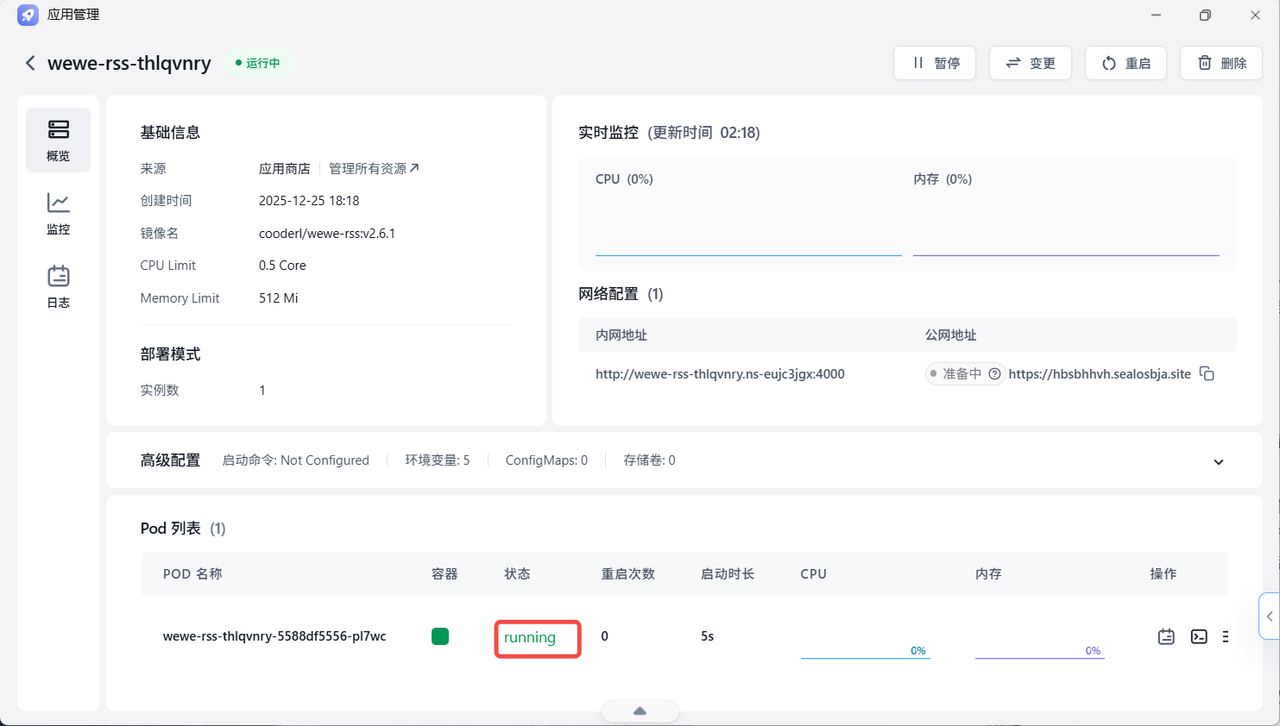
访问我的全新博客
部署成功后,在应用详情页的“网络配置”里,我找到了 Sealos 自动分配的公网域名。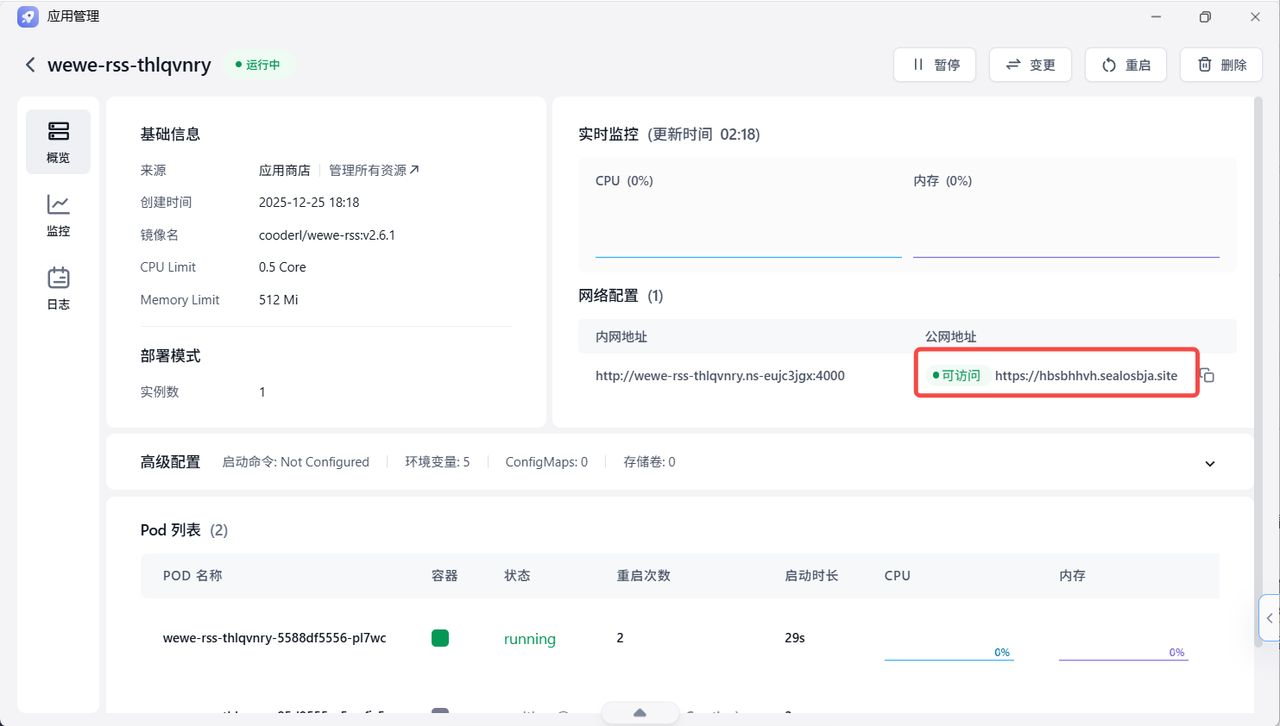
我点击链接,直接就看到了我刚刚设置的博客标题,以及熟悉的 WordPress 安装成功界面。输入预设的管理员账号和密码,我立刻就进入了网站后台。一个功能完整、配置完善、支持 HTTPS 的 WordPress 网站,就这么上线了。
结尾
从两天到三分钟,Sealos 带来的不仅仅是效率的提升,更是一种观念的颠覆。
它让我深刻体会到,未来的云计算就应该是这样:我们只关心“我想要什么”,而“如何实现”的复杂过程,都应该交给平台去处理。如果你也想拥有一个自己的网站,但又被复杂的技术细节所困扰,那么 Sealos 绝对是你的最佳选择。


















 948
948

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










