



3D打印技术参考注意到,美国知名金属3D打印设备制造商Velo3D于当地时间3月31日发布2024财年业绩。财报显示,该公司2024年营收4100万美元(约2.97亿人民币),相比2023年的7740万元减少47%,净亏损超过7330万美元,远远不及8000万美元的最低预期。Velo3D内部到底发生了什么,又是谁接手了被Velo3D丢失的市场?
Velo3D在2023年之前凭借无支撑打印和可靠的质量保障体系在一段时间内曾经引发行业地震,并于2022和2023财年实现领先行业的营收业绩。但此后两年却出现企业重大经营问题,导致营收和股价暴跌。当前Velo3D市值近为3200万美元,在上市的3D打印企业中排名垫底。
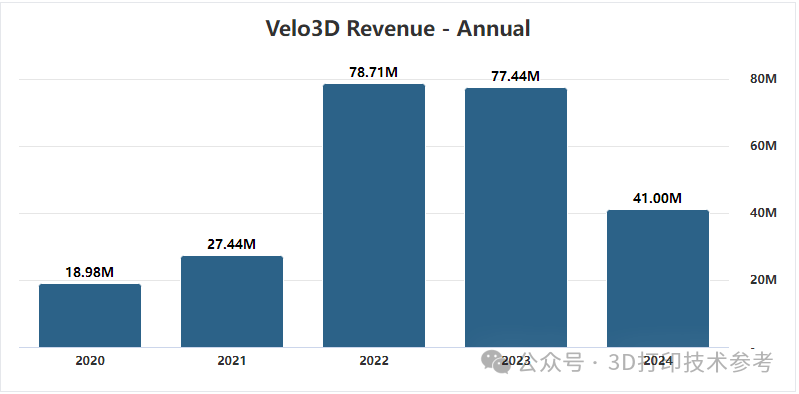
Velo3D 2020-2024营收

全球主要从业3D打印技术的上市企业市值(截至2025.4.1)
Velo3D首席执行官表示,2024年该公司实施了一系列战略措施,力图通过些改变加速实现长期盈利,并重新夺回在增材制造领域的领导地位。曾经对其有兴趣的埃隆·马斯克和SpaceX,并没有出手救它。而是迎来迎来另一家专注于轻量化精密制造的大股东,后者通过债转股完成了收购。Velo3D表示,新股东的到来可使其在航空航天、国防、赛车运动和电动汽车等这些对轻量化高强度应用有较大需求的行业中发挥更大作用。其他举措还包括最大化增长、提高毛利率、提高制造效率和降低运营费用以及执行新的重点战略。其中,该公司2024年运营费用与2023年相比下降了25%。

Velo3D曾以无支撑金属3D打印引发行业地震

Velo3D仍然拥有吸引客户的技术,这个封闭的贮箱便是实例
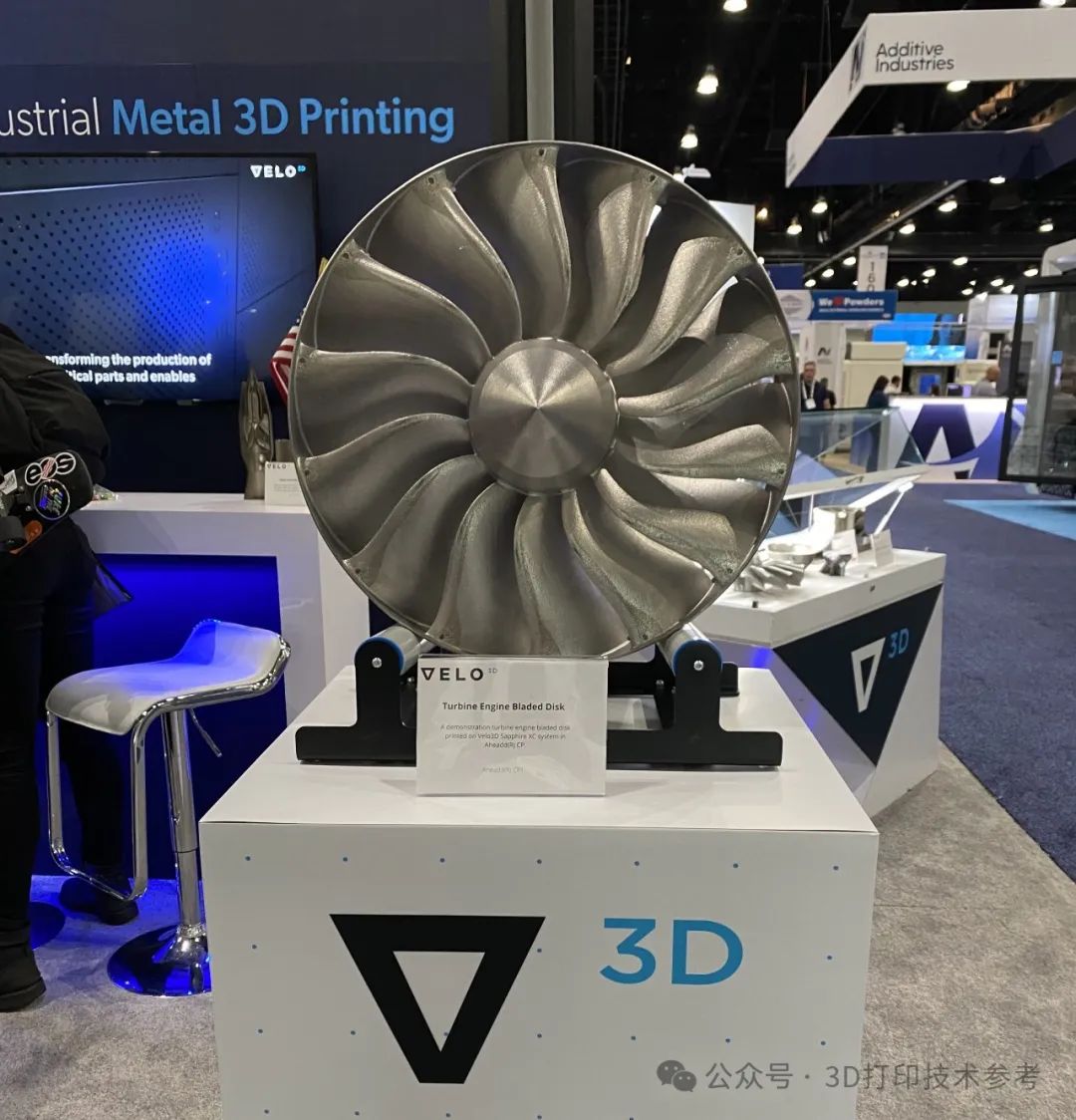
Velo3D仍然拥有吸引客户的技术
Velo3D表示,其新的市场营销策略正在获得新老客户的广泛认可,尤其在美国国防和航空航天行业,因为客户希望扩大其国内供应链。该公司新解决方案的最大特色是,为客户提供清晰的从原型到生产全过程的支持。因此它是建立在原有客户的基础之上,实际上是在帮助客户更好的用好3D打印技术,并在这个过程中,帮助客户缩短设计周期、加快生产资质认证并确保零部件生产质量的一致性和高水准。
Velo3D相信这种模式充分利用了其广泛的产品和材料专业知识,并将带来更多样化的收入来源,同时推动利润率的提高。 目前的合作伙伴包括国防、航空航天和技术行业的领先公司。Velo3D发现客户对新的解决方案的需求正在不断增长,预计到2026年该业务将占其收入的40%。
丢失的市场
日本企业或是重要赢家
Velo3D今年的预期收入为5000万美元至6000万美元之间。然而,该公司面临的现实并不容乐观!美国用户正在用订单给出答案,被Velo3D丢失的市场,可能正在由尼康SLM Solutions接手!
3D打印技术参考不久前曾报道,尼康SLM Solutions2024财年收入达到1.5亿欧元(约1.63亿美元),比上一年增长36%。2024年,尼康SLM Solutions在美国当地开设了尼康先进制造技术中心,主要业务为向航空航天、国防和航空等行业提供先进的3D打印技术,并提供综合研发和专业知识支持。同时,该公司还开始在美国生产NXG XII 600金属增材制造系统,该系统深得美国当地多个行业的认可。外媒指出,这些事件标志着尼康SLM Solutions正致力于通过“美国制造”扩大制造能力并增强对北美客户群的服务。


问题的关键就在这里,欧美对于SLM Solutions的设备具有极高的认可度。在尼康收购SLM Solutions后,该公司的金属3D打印技术已融入前者全工艺体系中。依托其全球巨头地位的丰富资源,如全球销售网络和本地化技术支持,能够将3D打印技术在更广泛的市场中得到推广和应用。
在技术相差不多的情况下,Velo3D的优势已经非常不明显!多年前Velo3D最先倡导的无支撑打印以及质量控制体系,在多家企业迅速补齐短板的目前看,前者当初的优势已经无法再提起用户的兴趣。此外,受益美国市场的3D打印机制造商还有EOS以及具有极高性价比的中国品牌。
注:本文由3D打印技术参考创作,未经联系授权,谢绝转载。
欢迎转发
欢迎加入硕博千人交流Q群:248112776
延伸阅读:
1.Wohlers Report 2025:全球增材制造市场规模达到219亿美元,同比增长9.1%!
2.已超100家!中国3D打印企业强势出海!德国Formnext展会报名速度空前增长
4.中国3D打印企业拓展海外业务,成功捍卫自身权利!事件始末值得深思!




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










