




三叉神经节神经元(TGN)是研究头面部痛觉、偏头痛、神经病理性疼痛、三叉神经损伤修复的经典体外细胞模型,原代分离培养直接决定后续造模、药物筛选、免疫荧光、电生理等实验成败。 很多新手做 TGN 原代细胞时容易遇到杂细胞过多、神经元存活率低、消化过度碎细胞、贴壁差、提前凋亡等问题,反复踩坑浪费乳鼠与试剂。今天整理一套本人多次验证、重复性稳定的 SD 乳鼠三叉神经节原代分离完整实操方案,从前期包被、解剖取材、消化离心到培养鉴定全流程细化,附带关键避坑要点,新手也能一次做出高纯度活性良好的三叉神经元,适合疼痛、神经生物学方向科研人直接收藏复用。
一、实验材料
1. 实验动物
出生 1–3 日龄 SD 乳大鼠,雌雄不限,单次实验推荐 5 只,幼鼠神经元活力强、胶质杂细胞占比低。
2. 组织样本
大鼠三叉神经节(TG)
3. 手术器械
手术剪、粗解剖镊、精细眼科剪、眼科镊(提前高压灭菌备用)
4. 消化试剂
Ⅱ 型胶原酶
5. 神经元完全培养基
Neurobasal-A 基础培养基 + B-27 添加剂 (50×) + 1% 青链霉素双抗
6. 培养板包被液
0.1 mg/mL 多聚赖氨酸溶液
二、标准化实验操作步骤
1. 培养板提前包被(关键:保证神经元贴壁)
取 0.1 mg/mL 多聚赖氨酸加入 6 孔板,液面完全覆盖板底即可; 两种包被方案任选:37℃孵箱放置 2 h,或 4℃冰箱过夜; 使用前无菌 PBS 洗涤孔板 3 次,超净台内自然晾干备用。
2. 乳鼠消毒处死
将新生乳鼠完全浸泡 75% 医用酒精 5 min,充分体表灭菌,降低取材污染风险。
3. 解剖取材三叉神经节(全程冰上操作)
- 沿枕骨大孔剪开皮肤、逐层剥离颅骨与颞骨,剔除大脑、小脑组织,充分暴露颅底三叉神经节;
- 完整剥离 TG 组织,立即放入预冷、含 2% 双抗的无菌 PBS;
- 预冷 PBS 反复冲洗组织 3 次,去除血液、组织碎屑。
4. 组织剪碎与酶消化
眼科剪将神经节剪碎至 1–2 mm³ 细小组织块,加入适量 0.1% Ⅱ 型胶原酶; 37℃恒温消化 30 min,每间隔 10 min 轻柔吹打一次,加速组织解离; 肉眼无明显块状组织即可终止消化。
5. 离心收集细胞(无需过滤,简化操作减少细胞损耗)
消化混合液直接转移离心管,1200 rpm 离心 5 min; 缓慢弃去上清,避免吸走细胞沉淀。
6. 细胞铺板培养
加入配制好的神经元专用完全培养基轻柔重悬细胞沉淀,均匀接种至提前包被完成的培养板 / 培养瓶。
7. 换液与细胞生长周期
铺板后第 3 天进行首次换液,此时细胞密度可达 60%–80%,神经元形态完整、突起舒展; 持续培养至 10 天左右,神经元会逐步出现老化、凋亡,不建议长期传代培养。
三、核心避坑备注(实操高分要点)
- 乳鼠日龄严格把控:优先选用刚出生 1–3 天新生乳鼠,日龄越大神经元活力下降、胶质杂细胞大量增殖,纯度大打折扣;
- 全程低温保护细胞:取材、漂洗、剪碎组织全程冰上操作,减少离体神经元缺氧损伤;
- 省略过滤步骤:消化后无需细胞筛过滤,直接离心,过滤会大量损失神经元,大幅降低细胞得率;
- 控制实验周期:铺板 3 天细胞状态最佳,适合给药、造模、免疫荧光检测;培养超过 10 天神经元凋亡明显,杂细胞过度增殖干扰实验结果。
四、细胞形态与特异性鉴定说明
1. 白光镜下细胞形态
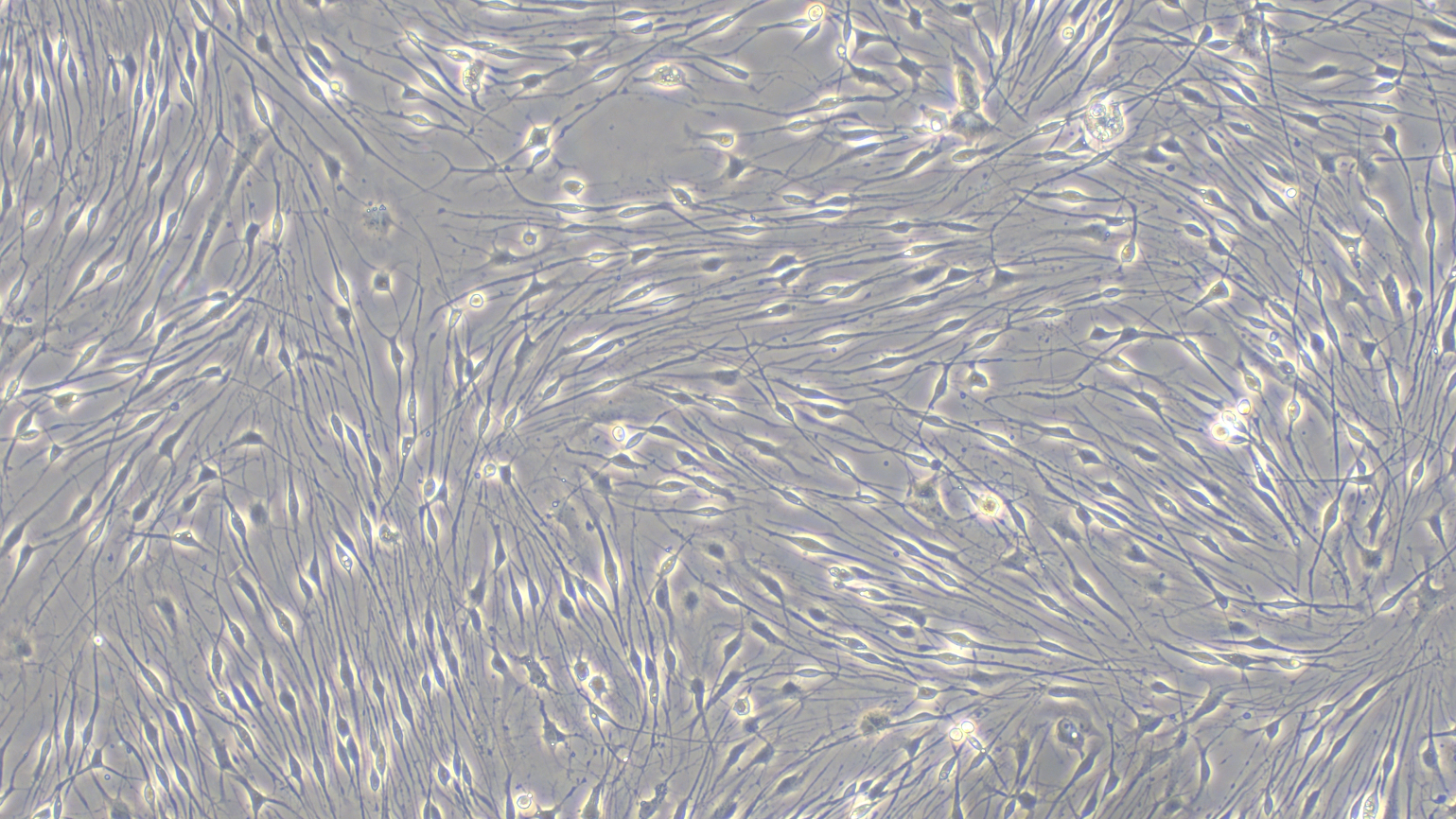
图1:铺板 3 d 100 倍镜:神经元贴壁稳定,胞体透亮,长出细长神经突起;
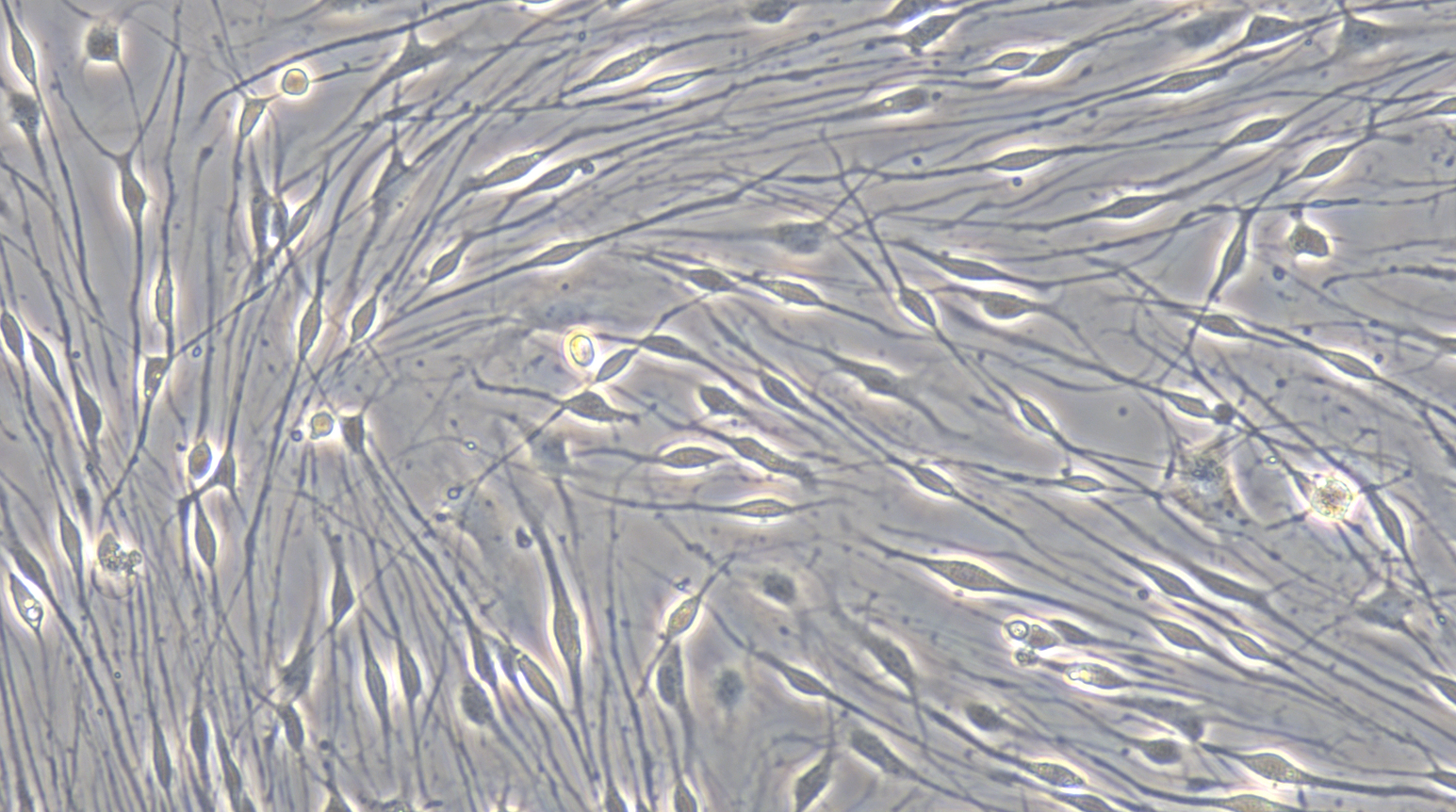
:图二:铺板 3 d 200 倍镜:可清晰区分神经元胞体、突起网络,细胞轮廓清晰。
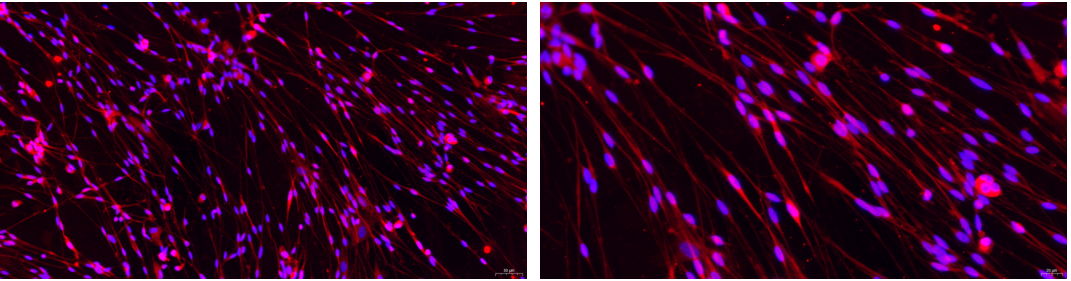
2. 免疫荧光特异性鉴定(神经元纯度验证)
采用两种经典神经元标志物染色鉴定,排除胶质细胞污染:
- NeuN(成熟神经元核标记):200 倍、400 倍荧光镜下可见神经元细胞核特异性荧光;
2.β-Tubulin III(神经元骨架蛋白):200 倍、400 倍镜下胞体及神经突起均呈阳性荧光信号。
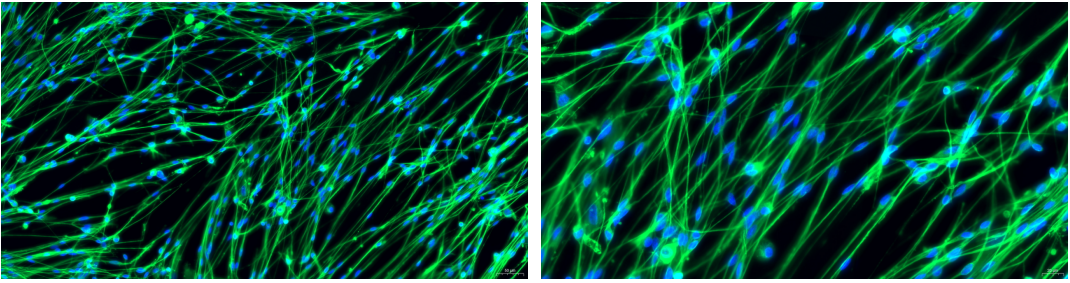
两种标志物双阳性可证明分离细胞为高纯度三叉神经节神经元。
这套 TGN 原代分离方案经过多次实验优化,省去过滤步骤减少细胞损耗,搭配多聚赖氨酸过夜包被大幅提升贴壁率,完美解决新手常见的细胞存活率低、纯度差、污染三大难题。 整体操作门槛适中,试剂与耗材均为神经实验室常规配置,取材后 3 天即可获得状态优良的成熟三叉神经元,适配疼痛机制、神经炎症、离子通道、药物镇痛筛选等各类体外功能实验。

















分离培养完整实操 Protocol&spm=1001.2101.3001.5002&articleId=162407684&d=1&t=3&u=f70dae76f82849f881511bffe647ddd6)
 202
202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










