




目录
介绍
在拿到mid360的同时研究了查看点云,但是在建图上遇到了一些困难,原因是mid360所采用的三维图,想要用一些其他的算法来实现建图功能需要进行二维图像转换三维图像,这样就大大加大了 工作的难道,所以本文将自己来搭建mid360的建图功能,从零开始,希望能够帮助机器人开发的朋友。
测试环境
Ubuntu20.04
ROS1
ros-noetic
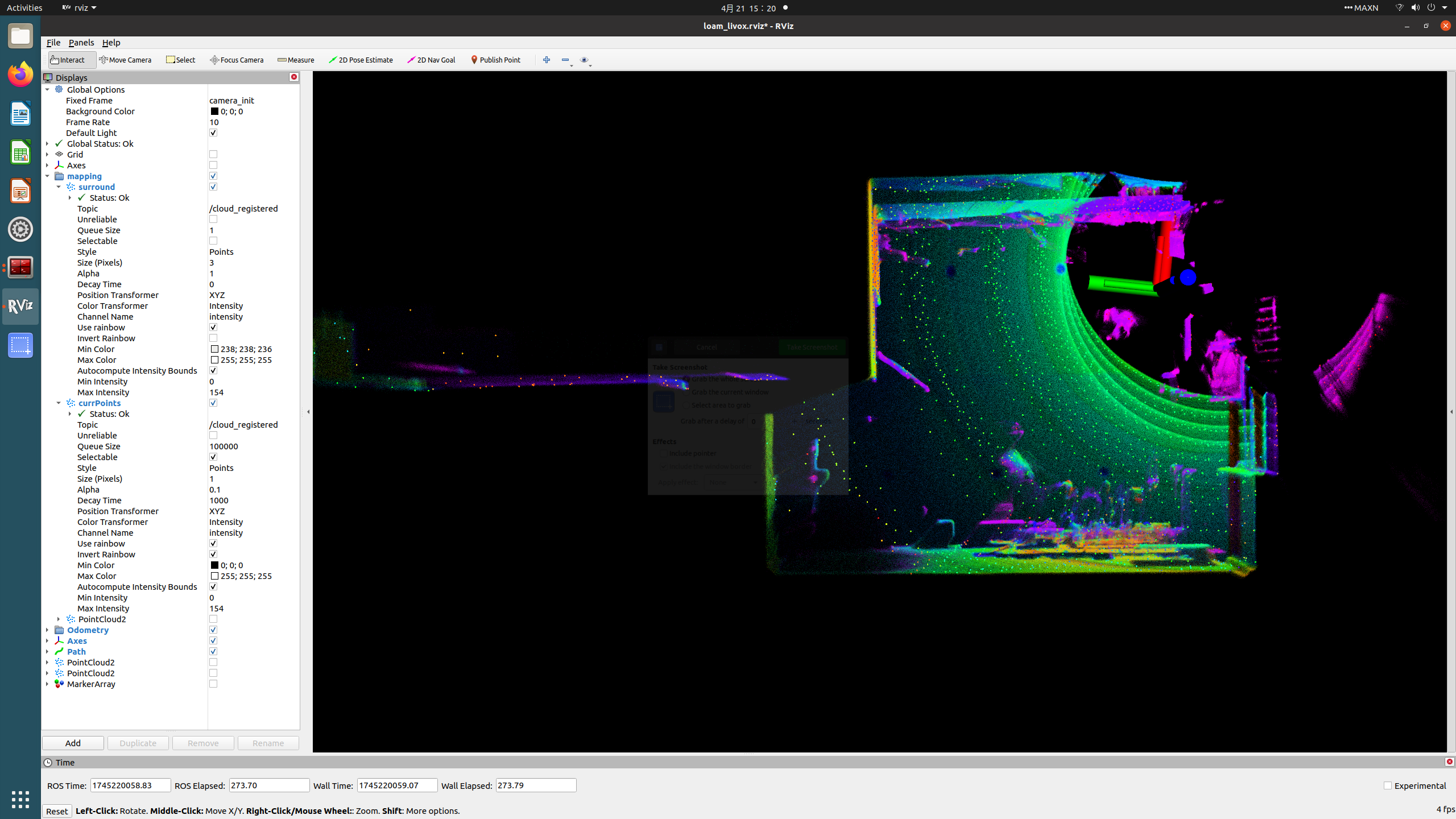
Livox和Fast-Lio配置
1.安装Livox_SDK2
2.安装Livox_ros_driver2
步骤一和步骤二参考
目录
在拿到mid360的同时研究了查看点云,但是在建图上遇到了一些困难,原因是mid360所采用的三维图,想要用一些其他的算法来实现建图功能需要进行二维图像转换三维图像,这样就大大加大了 工作的难道,所以本文将自己来搭建mid360的建图功能,从零开始,希望能够帮助机器人开发的朋友。
Ubuntu20.04
ROS1
ros-noetic
步骤一和步骤二参考
 5125
5787
5125
5787

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























