




 本文介绍了图像分割的重要性和不同方法。基于阈值的分割包括全局阈值、最小误差法和最大方差法;基于边缘的分割讨论了点检测、线检测和霍夫变换;基于区域的分割则涵盖了区域生长法和分裂合并法。这些技术在计算机视觉领域中用于目标识别和分析。
本文介绍了图像分割的重要性和不同方法。基于阈值的分割包括全局阈值、最小误差法和最大方差法;基于边缘的分割讨论了点检测、线检测和霍夫变换;基于区域的分割则涵盖了区域生长法和分裂合并法。这些技术在计算机视觉领域中用于目标识别和分析。
前言
先解释一些相关名词:
a)图像的基本属性:包括像素、分辨率、大小、颜色、位深、色调、饱和度、亮度、色彩通道、图像的层次等,在图像分割里指在灰度、纹理和颜色上处于同一个模式。
b)区域:具有共同属性的像素的连通集合。
而图像分割是将图像划分为若干互不相交的小区域。
那什么要做图像分割处理呢?
这是由于在做视觉信息处理的时候,可能只对图像中的部分区域(如目标、前景等)感兴趣,所以为了辨识及分析这些目标,就需要对其进行分割或提取处理。
基于阈值
设原图像为
而分割后的图像为
具体分割方法如下:
这里的T为二值化图像的阈值。阈值大致可分为全局阈值、局部阈值和动态阈值三种。
阈值的选取方法有多种常见的有直方图技术、最小误差或最大方差法,下面对其进行详细描述。
基于直方图技术
若前景和背景的灰度分布值差别很大(即目标和背景的对比度高),且前景的灰度分布比较均匀时,可以采用直方图技术,此时直方图呈双峰特点,峰谷可取为阈值。
而对于复杂图像,则需要采用全局阈值的方法,这时可以将刚刚确定的指作为初始阈值,并设置一个允许误差范围,以这个值为界限将图像像素分为两组并计算每组的平均灰度,这两组的平均灰度的平均值即为新的阈值,重复上述操作直到逐次迭代所得的T之差小于事先设定的允许误差范围,最后一次的阈值即为全局阈值。
最小误差法
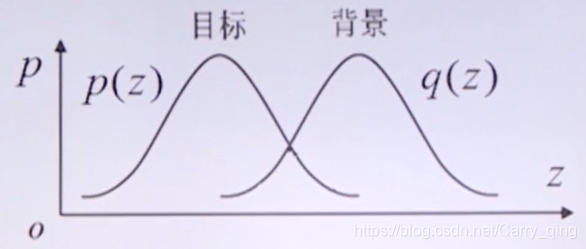
设目标及背景灰度分布概率密度函数(如下图)分别为p(z),q(z),设目标占整体的比例为w,此时整体图像的灰度概率密度为:w*p(z)+(1-w)*q(z)。
如图,若以T作为阈值,则会有目标被错分为背景和背景被错分为目标的部分。
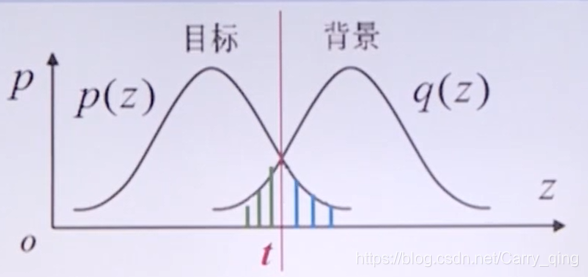
将其分别记为P(t)和Q(t),并计算:
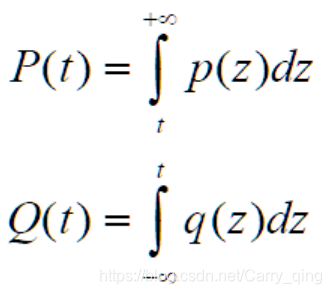
此时错误分割的概率为:w*P(t)+(1-w)*Q(t),而最小误差法,就是要将这个值降到最小。
根据数学知识可以知道,我们可以对上述表达式作求导运算,当其导数值为零时,求得的T值即为所需要的阈值。
最大方差法
最大方差法也称OSTU大津法,是1979年由学者大津提出,关于大津法的具体解释可参考我之前写的一篇文章:https://blog.csdn.net/Carry_qing/article/details/113407535
基于边缘
首先解释相关概念:
a)点检测:基于点检测的模板进行,若图像中孤立的点对该模板有较大的响应,则该点可看为孤立点。
b)线检测:与点检测相似,线检测也是基于模板进行的,它是用R1,R2,R3,R4 分别四个方向线检测模板,对于图像中的点,当|Ri|>|Rj|,i ≠ j时,则该点被认为与在模板i方向上的线更相关,而对于图像中灰度恒定的区域,对上述4个模板的响应为零。
图像的边缘是指图像中一组相连的像素集合,这些像素位于两个区域边界。我们可以通过一阶或二阶导数等方法来提取图像的边缘。
常规算法
对图像进行微分运算,也就是计算梯度,图像函数f(x,y)在像素点(x,y)的梯度为一个向量,计算如下:
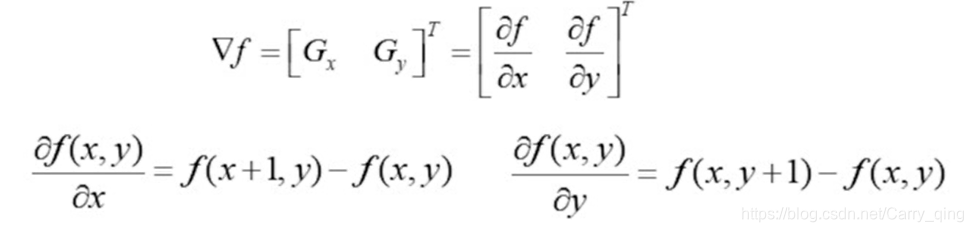
该差分值在平坦区为零,而在边缘为非零,因此我们可以利用这个性质来提取图像边缘。
Hough变换
在实际应用中,由于噪声、照明等产生边缘间断,使得一组像素难以完整形成边缘。要解决这个问题,我们需要连接边界点,以构成完整的边界图形,即对于边界上的n个点的点集,求共线的点集以及直线方程。这就是常说的霍夫(Hough)变换。
Hough变换是一种检测、定位直线和解析曲线的方法,它是把二值图变换到Hough参数的空间中,在参数空间用极值点的检测完成目标的检测。
Hough变换的基本思想是将坐标转换到参数平面,在参数平面中相交直线最多的点,对应的x , y平面的直线即为所求的直线。在实际算法实现过程中,我们也可以采用极坐标或曲线坐标的形式来判断。
当然考虑到实际应用时需要对算法进行简便处理,我们可以通过已有点集来预测大致范围,也就是通过交点累加器或者交点统计直方图来进行辅助。Hough变换的应用范围很广,常见的文档矫正就是采用Hough变换的结果。参数平面中相交直线最多的点,对应的x , y平面的直线即为所求的直线
基于区域
将区域R划分为若干子区域R1,R2,…Rn,区域满足完备性,连通性,独立性,单一性和互斥性。
区域生长法
区域生长法就是对每个需要分割的区域找一个种子像素作为生长的起点,判断种子像素周围邻域中与种子像素是否具有相似性质,若具有相似性质,则将该像素合并到种子像素所在的区域,将这些新像素当作新的种子像素继续进行上面的过程,直到再没有满足条件的像素可被包括进来。种子像素可以通过直方图粗分割或者人为来确定。
分裂合并法
对于任一R,如果V(Ri)>T,则将其分裂成互不重叠的四等分,对相邻区域Ri和Rj,如果V(RiURj)≤T,则将二者合并,如果进一步的分裂或合并都不可能,则终止算法。
如有疑问或错误,欢迎和我私信交流指正。
W.By Xyq



















 636
636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












