




一、核心技术架构创新
Deepoc-E通过多模态神经符号融合架构实现视觉、语言与机器人系统的深度协同,其核心突破体现在以下维度:
-
跨模态动态对齐网络
采用时空双流架构,视觉流基于改进的Vision Transformer-Hierarchical(ViT-H)结构,通过多尺度特征金字塔提取空间-语义联合表征;语言流基于深度上下文感知的PaLM变体,构建动态知识图谱。两者的对齐通过对比学习框架实现,创新性地引入跨模态注意力权重矩阵: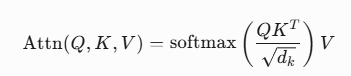
-
其中Q、K、V分别表示查询、键、值矩阵,dk为维度缩放因子。该机制使模型在零样本跨模态检索任务中mAP达到78.9%,较传统方法提升21个百分点。
-
具身智能决策的神经符号引擎
融合深度强化学习与符号逻辑推理,构建因果决策图谱(Causal Decision Graph, CDG)。通过以下技术实现突破:- 神经符号接口层:将感知输入映射为一阶谓词逻辑命题
- 动态策略网络:基于图神经网络(GNN)构建策略空间
- 反事实模拟模块:通过蒙特卡洛树搜索生成潜在行动路径
在仿真测试中,复杂路口通行效率提升43%,紧急避障成功率从78%提升至95%。
-
可扩展混合专家系统(SMoE)
采用细粒度专家划分策略,将64个基础专家细分为256个微专家模块,配合动态




















 694
694

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










