




recovery_beheviors机制
一.总览
当移动机器人认为自己被卡住时,指导机器人进行一系列的恢复行为。
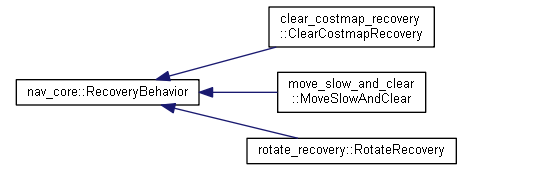
navigation包中的恢复行为主要包括三种:
- clean_costmap_recovery:先清理周围一定范围以外的costmap
- rotate_recovery:旋转360度
- move_slow_and_clean:缓慢移动
二.recovery的触发条件
都是在move_base.cpp里进行的主流程的控制
三种触发条件,如下:
enum RecoveryTrigger
{
PLANNING_R, // 全局规划失败
CONTROLLING_R, // 局部轨迹规划失败
OSCILLATION_R // 长时间在小区域运动(机器人震荡)
};
三.恢复行为
1.clean_costmap_recovery
先清理周围一定范围以外的costmap
会清理从机器人所在位置开始,指定 reset_distance_米的矩形范围之外的 costmap 中数据, 默认清理 obstacle layer 的数据 (取决于layer_names配置)。
清理时,将地图中内容设置为未知。
清除指定的 layer 层,affected_maps参数设置是否清除global/local/all。
该模块代码注释说明:
#include <boost/pointer_cast.hpp>
#include <clear_costmap_recovery/clear_costmap_recovery.h>
#include <pluginlib/class_list_macros.h>
#include <vector>
// register this planner as a RecoveryBehavior plugin
// 该插件将costmap中给定半径(reset_distance_默认值3.0)范围之内的区域进行清理,即将栅格状态更新为未知信息
PLUGINLIB_EXPORT_CLASS(clear_costmap_recovery::ClearCostmapRecovery,
nav_core::RecoveryBehavior)
using costmap_2d::NO_INFORMATION;
namespace clear_costmap_recovery {
ClearCostmapRecovery::ClearCostmapRecovery()
: global_costmap_(NULL), local_costmap_(NULL), tf_(NULL),
initialized_(false) {
}
void ClearCostmapRecovery::initialize(std::string name, tf2_ros::Buffer *tf,
costmap_2d::Costmap2DROS *global_costmap,
costmap_2d::Costmap2DROS *local_costmap) {
if (!initialized_) {
name_ = name;
tf_ = tf;
global_costmap_ = global_costmap;
local_costmap_ = local_costmap;
// 参数服务器中获得参数
ros::NodeHandle private_nh("~/" + name_);
// 代价地图清除的距离 以该范围为边长 画一个正方形
//从地图上清除用户该区域以外的障碍物
private_nh.param("reset_distance", reset_distance_, 3.0);
private_nh.param("invert_area_to_clear", invert_area_to_clear_, false);
private_nh.param("force_updating", force_updating_, false);
private_nh.param("affected_maps", affected_maps_, std::string("both"));
// 地图清理的范围 local global 或者两者都包括
if (affected_maps_ != "local" && affected_maps_ != "global" &&
affected_maps_ != "both") {
ROS_WARN("Wrong value for affected_maps parameter: '%s'; valid values "
"are 'local', 'global' or 'both'; "
"defaulting to 'both'",
affected_maps_.c_str());
affected_maps_ = "both";
}
// 清理的地图层 默认障碍物层
std::vector<std::string>
clearable_layers_default, clearable_layers;
clearable_layers_default.push_back(std::string("obstacles"));
private_nh.param("layer_names", clearable_layers, clearable_layers_default);
for (unsigned i = 0; i < clearable_layers.size(); i++) {
ROS_INFO("Recovery behavior will clear layer '%s'",
clearable_layers[i].c_str());
clearable_layers_.insert(clearable_layers[i]);
}
initialized_ = true;
} else {
ROS_ERROR(
"You should not call initialize twice on this object, doing nothing");
}
}
void ClearCostmapRecovery::runBehavior() {
if (!initialized_) {
ROS_ERROR("This object must be initialized before runBehavior is called");
return;
}
if (global_costmap_ == NULL || local_costmap_ == NULL) {
ROS_ERROR("The costmaps passed to the ClearCostmapRecovery object cannot "
"be NULL. Doing nothing.");
return;
}
if (!invert_area_to_clear_) {
ROS_WARN("Clearing %s costmap%s outside a square (%.2fm) large centered on "
"the robot.",
affected_maps_.c_str(), affected_maps_ == "both" ? "s" : "",
reset_distance_);
} else {
ROS_WARN("Clearing %s costmap%s inside a square (%.2fm) large centered on "
"the robot.",
affected_maps_.c_str(), affected_maps_ == "both" ? "s" : "",
reset_distance_);
}
ros::WallTime t0 = ros::WallTime::now();
if (affected_maps_ == "global" || affected_maps_ == "both") {
clear(global_costmap_);
if (force_updating_)
global_costmap_->updateMap();
ROS_DEBUG("Global costmap cleared in %fs",
(ros::WallTime::now() - t0).toSec());
}
t0 = ros::WallTime::now();
if (affected_maps_ == "local" || affected_maps_ == "both") {
clear(local_costmap_);
if (force_updating_)
local_costmap_->updateMap(



















 6304
6304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










