




5月6日,其域创新正式发布了新一代灵光K2手持扫描仪!作为轻量级手持 SLAM 三维扫描领域的重磅新品,K2 凭借更优硬件、更强算法、更稳作业表现,一经亮相便备受行业关注。
作为其域创新官方合作伙伴,天宝耐特技术团队第一时间完成真机全流程实测,立足专业测绘场景,从硬件设计、扫描精度、绘图可用性、室内外实战四大维度,带来客观、硬核、可落地的测评报告,帮你快速了解K2到底强在哪!
一、硬件升级:倾斜激光+内置RTK
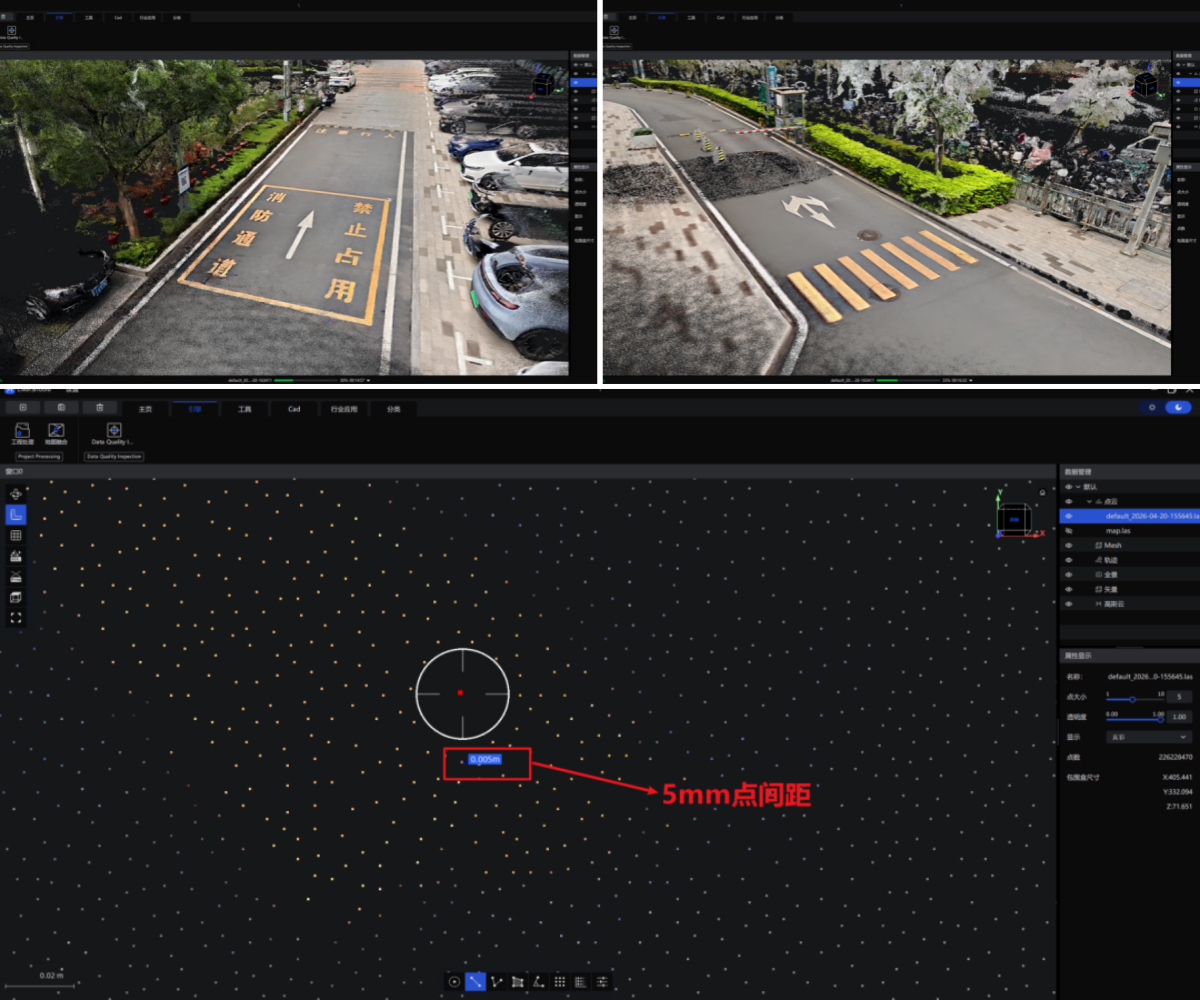
灵光K2搭载mid360激光头,并将激光头朝前倾斜30°,从根源解决前代K1地面区域点密度稀疏问题,大幅提升近地面、道路、地形场景的采集完整性。同时,机身内置RTK模块,支持卫星高精度定位,可直接输出带绝对坐标点云数据,不用额外配准,精准锁定空间位置。

设备核心参数:
-
重量:约1.2kg
-
数据接口:USB 3.1 Gen2
-
内部存储:EMMC 512G
-
工作时长:90min
-
扫描距离:40m@10%反射率(典型值);100m(截止量程)
-
视角范围:360° x -7~+52°
-
点云频率:20万点/s
-
相机数量:3(鱼眼x2,前视x1)
-
绝对精度:3cm
-
相对精度:1cm
-
输出数据类型:.las / .lcc / .ply / .obj / .osgb
-
特色功能:实时真彩点云、实时RTK融合、无间™点云算法、3D高

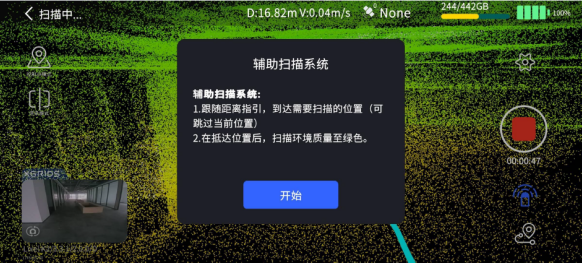
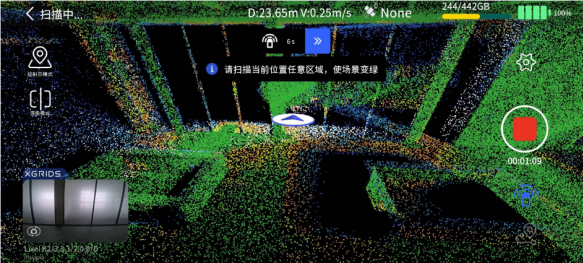
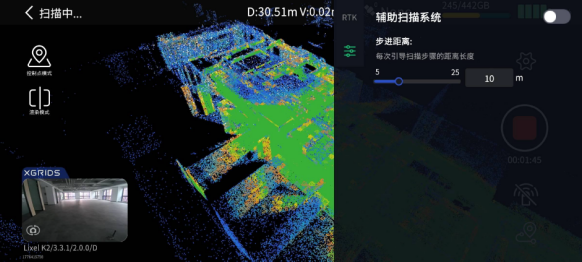
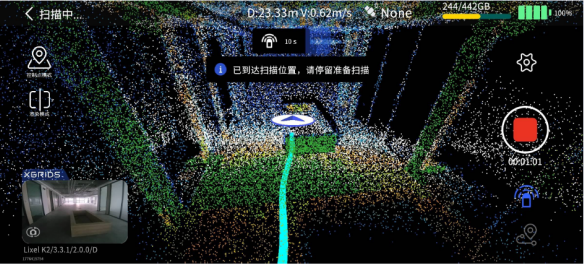
二、扫描指引:新手友好,告别遗漏
灵光K2配套的LixelGo 2.0 APP新增辅助扫描指引功能,可实时引导用户规划扫描路线,并通过点云色阶直观呈现扫描覆盖情况——未扫描区域为浅色,已完成扫描区域显示为绿色,用户可根据色阶提示,精准补扫遗漏区域。对新手用户而言,新增的辅助扫描系统可以快速掌握扫描节奏,避免重复作业。
三、室内外实测:专业性能,稳定输出
本次测试选址在云升科学园,覆盖室外大场景、园区道路、建筑立面等典型工况,后处理环节使用LixelStudio 4.0结合新算法进行点云处理,生成真彩点云并进行精度验证,完整复现外业→内业全流程:
-
布设7个高精度控制点(接入中国移动CORS,国家2000大地高)
-
手持扫描,LixelGo 2.0 实时提示距离与姿态
-
数据导入 LixelStudio 4.0 后处理,输出真彩点云与三维模型
-
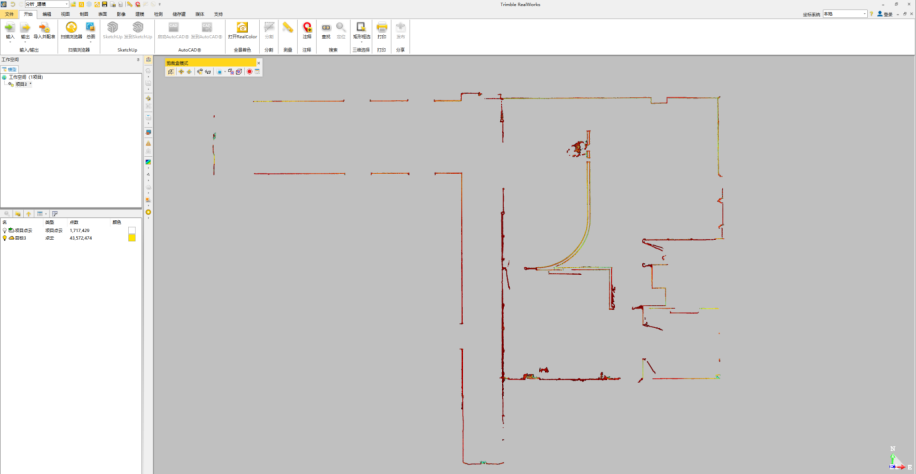
使用 Trimble RealWorks 进行精度核验与配准分析

外业测试

布设控制点

点分布图
1、实测关键发现
-
有效测距:室外实测绘图有效测距约 35m
-
RGB点云预览:LixelGo 2.0 新增RGB渲染,外业扫描预览更直观
-
地面覆盖:显著优于前代K1

LixelGo 2.0新增RGB点云渲染(室外)
预览点云
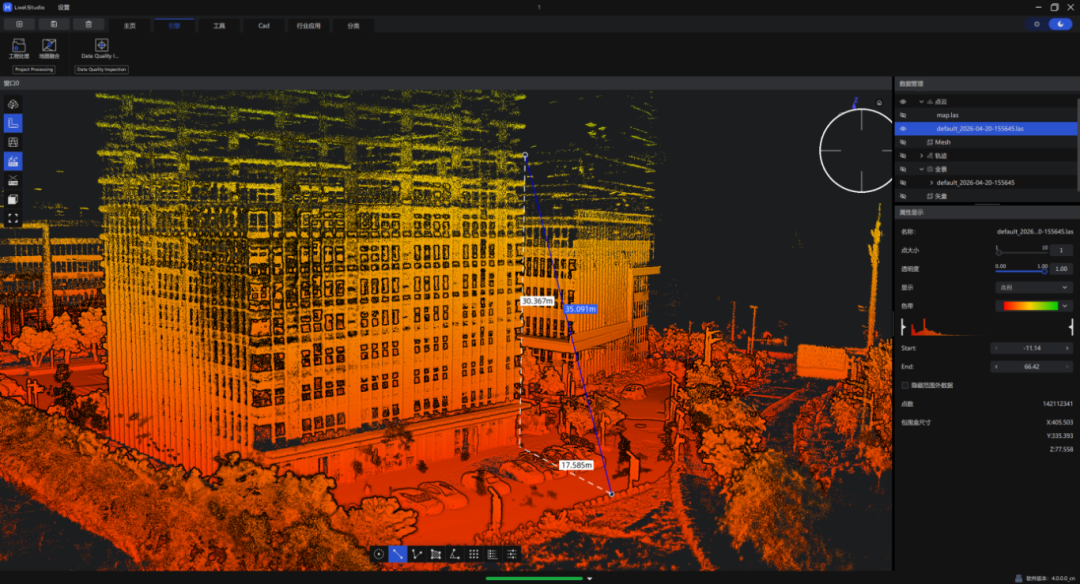
绘图可用测距35m
2、绝对精度核验
将7个控制点以txt格式导入Trimble RealWorks配准模块进行检验:
-
PT1控制点:平面偏移2cm,高程偏移2cm
-
PT4控制点:平面偏移3cm,高程偏移2cm
✅平面与高程转换误差整体在3cm左右,符合地形测绘的精度要求。
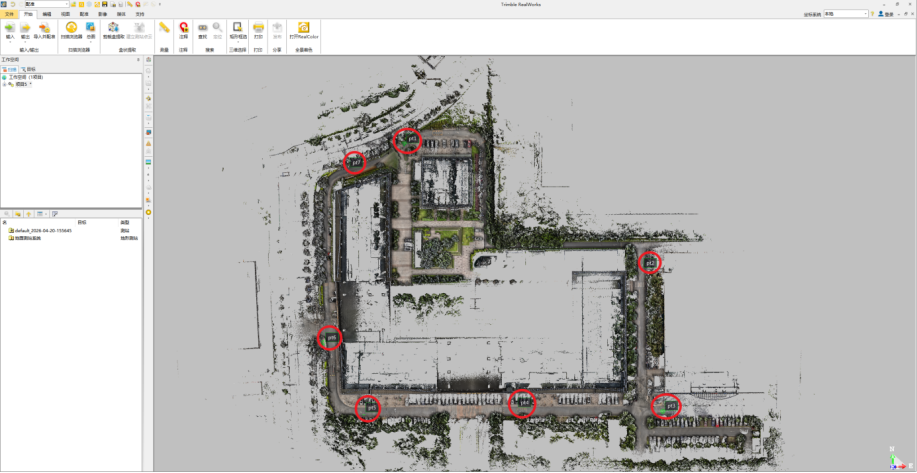
TRW导入控制点

pt1控制点

pt2控制点
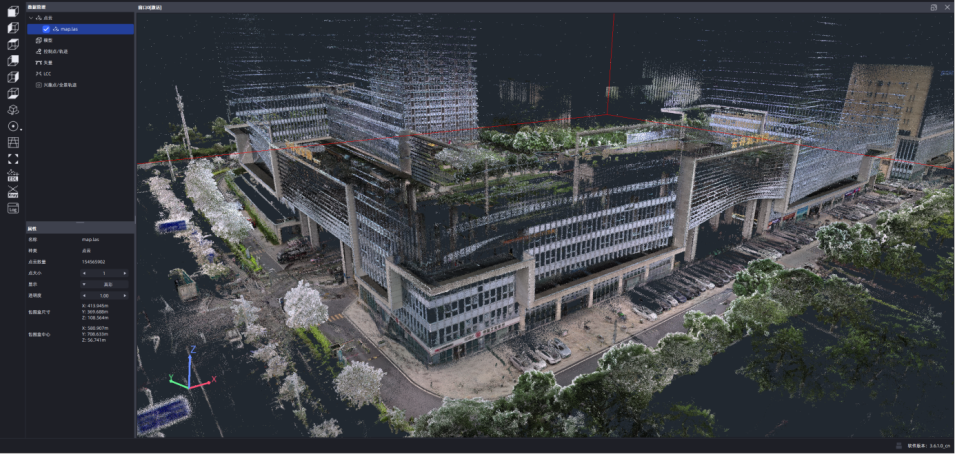
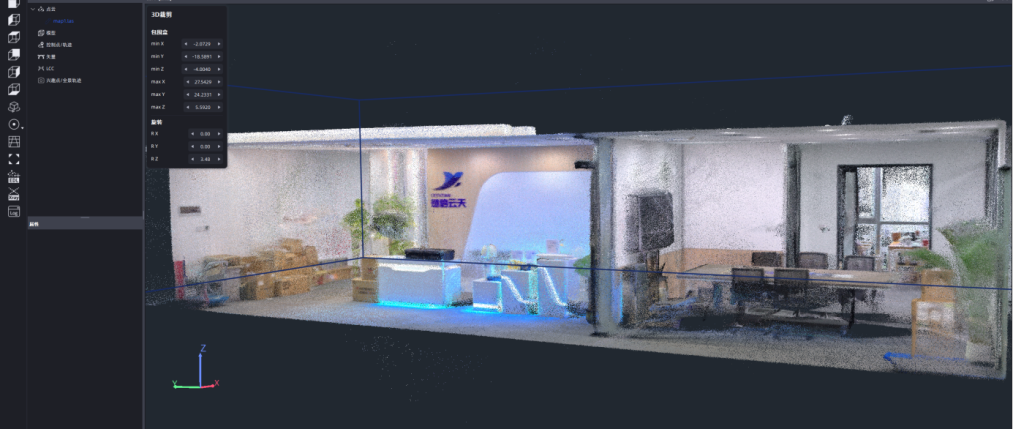
3、真彩点云与无间™算法
灵光K2适配无间™点云增强算法,结合超高着色精度,呈现照片级彩色点云。不管是建筑立面还是植被,色彩还原度高,轮廓清晰。室内场景下,人影去除效果明显提升,地面点云质量优于K1。
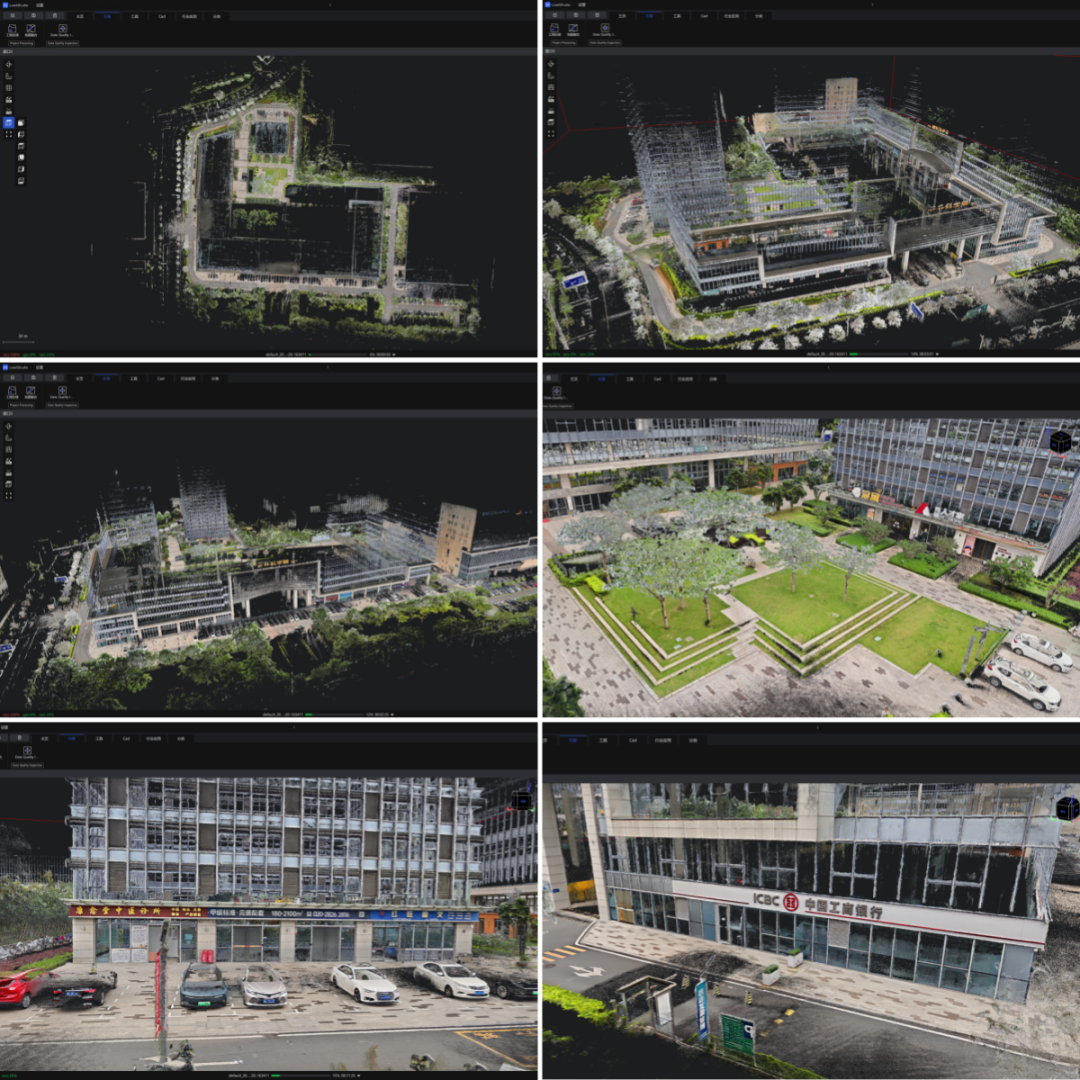
室外真彩点云
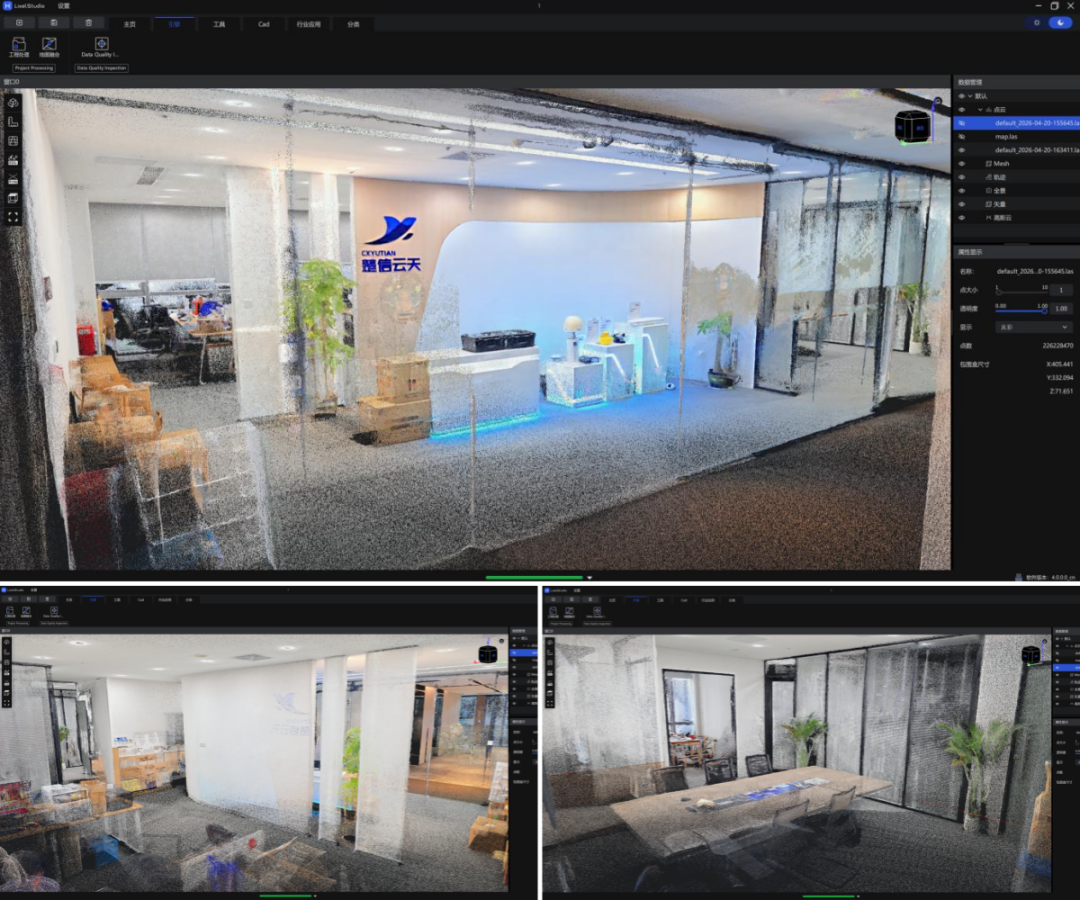
室内真彩点云
 无间™点云增强
无间™点云增强
4、中墙线测量与成图能力
从顶视图看,中墙线清晰、连续。点云厚度约1cm,剖切后线条轮廓明确,可直接用于绘制房屋平面图。滤波效果良好,无明显噪点,满足房产测量与竣工测量的绘图要求。
顶视图
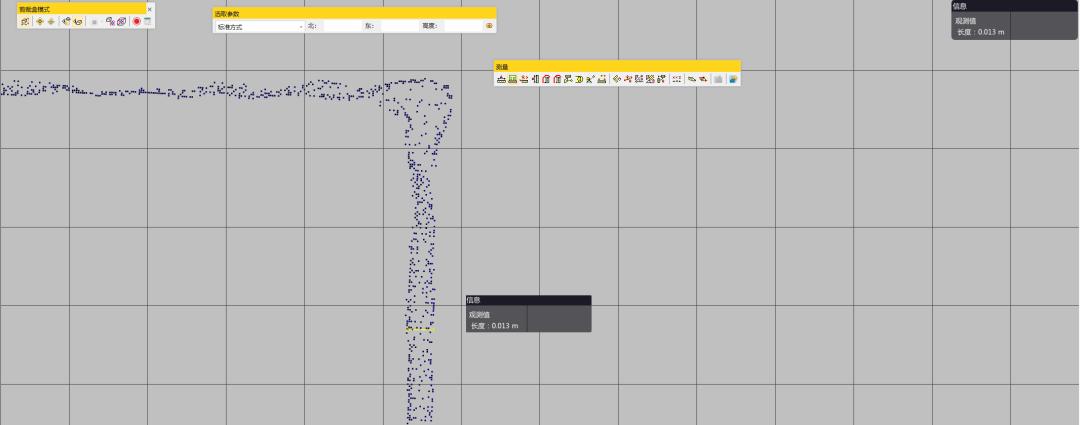
点云厚度
四、测评总结:高效采集的理想选择
天宝耐特技术团队通过实地测试得出:
-
灵光K2结合LixelStudio 4.0后处理算法,点云效果更真实、平滑,室内外环境适应性强;
-
设备精度达到地形测绘要求,平面和高程误差控制在3厘米以内;
-
点云厚度和中线提取效果优秀,支持直接绘制建筑平面图,提高现场数据利用效率。
对比前代K1,灵光K2在点云质量、精度稳定性、操作便捷性上全面升级,是测绘、住建、交通、数字孪生等领域高效采集的理想装备。

作为其域创新官方授权合作伙伴,天宝耐特不只做测评,我们更懂如何让先进装备真正落地。从设备测试、技术培训,到项目实施、售后保障,我们提供全程陪伴式服务,帮助每一位用户用好每一款设备,提升实战效率。接下来,我们将持续为行业带来前沿装备实测、硬核技术解读、落地应用方案,助力空间数字化高效落地。
如需灵光 K2 详细参数、测试数据、样机试用,欢迎后台留言咨询!


















 914
914

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










