



OpenGL官网:https://www.opengl.org/
GLUT安装步骤
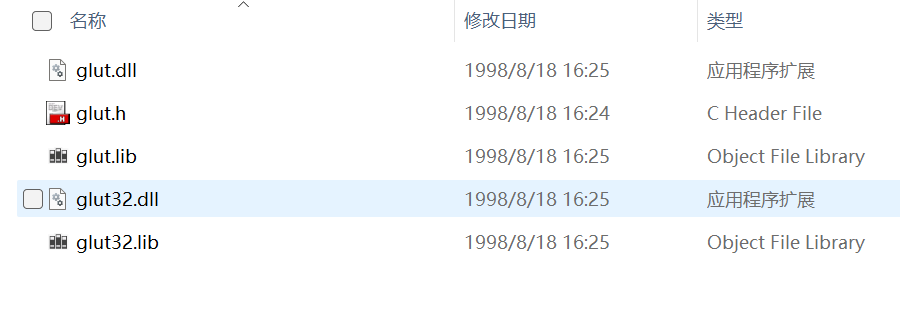
从官网下载GLUT压缩包(http://www.opengl.org/resources/libraries/glut/glutdlls37beta.zip),解压后获得以下文件:
头文件配置 在VS2022的include目录下创建gl文件夹:
打开VS2022根目录下的include文件夹
xxx\VS2022\VC\Tools\MSVC\14.31.31103\include\gl
将glut.h放入该文件夹。
库文件配置 将glut.lib和glut32.lib复制到x86文件夹:
xxx\VS2022\VC\Tools\MSVC\14.31.31103\lib\x86
动态链接库配置 32位系统复制到C:\Windows\System32,64位系统复制到C:\Windows\SysWOW64:
glut.dllglut32.dll
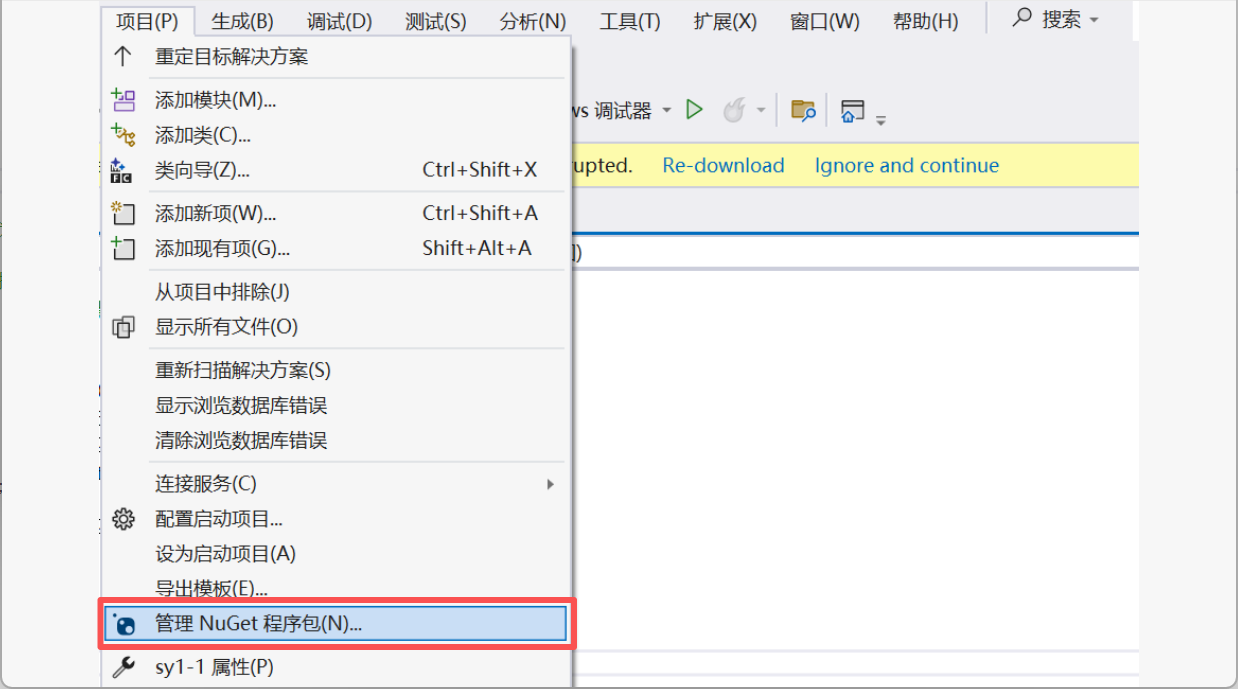
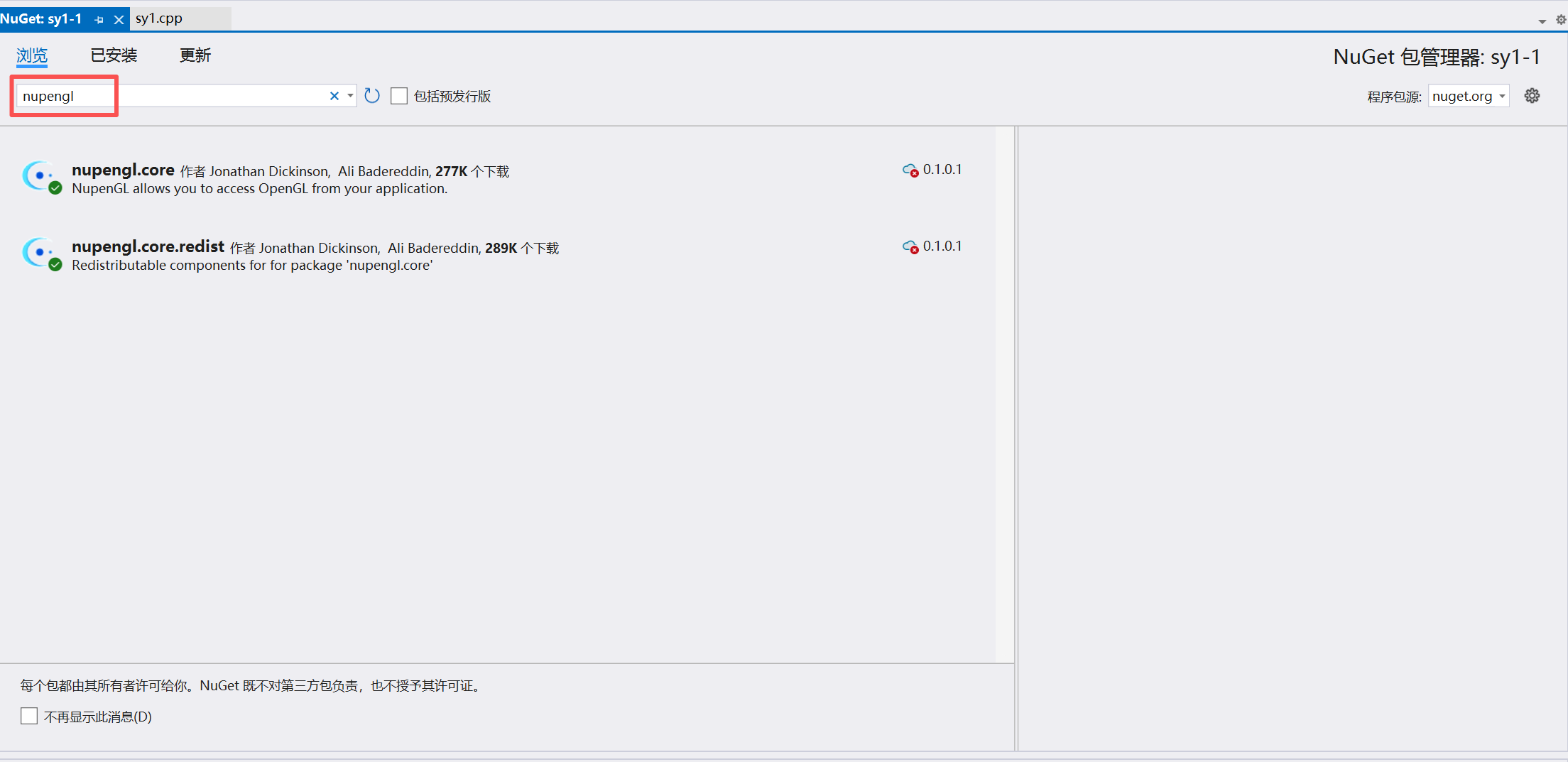
项目依赖配置 在VS2022中创建控制台项目后,通过NuGet安装nupengl包(需为每个新项目重复安装)。
注意:下载其中一个后,另一个也会自动下载
GLFW安装步骤
从官网下载Windows 64位版本(根据VS版本进行选择)https://www.glfw.org/download.html![]() https://www.glfw.org/download.html
https://www.glfw.org/download.html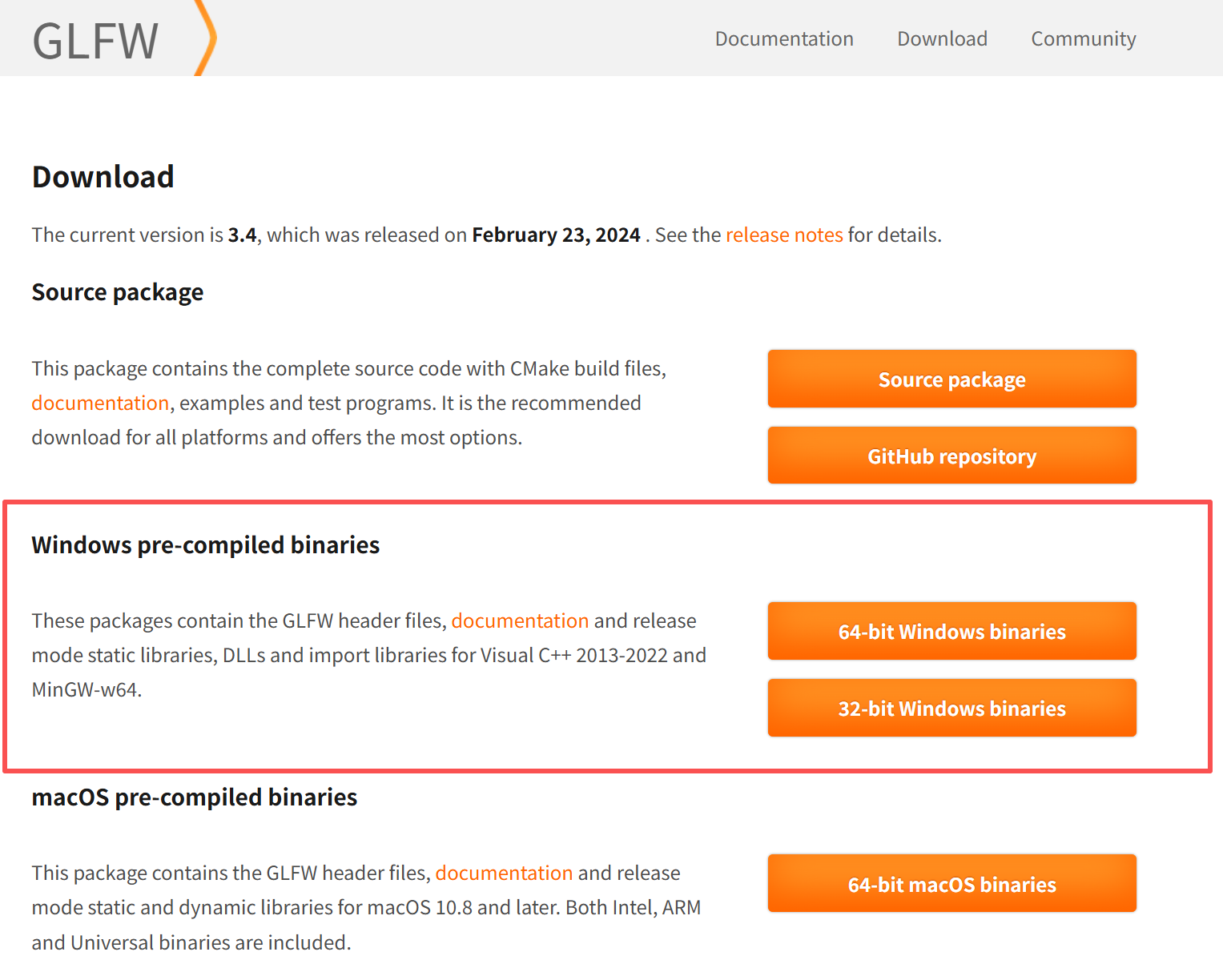
打开GLFW文件夹 glfw-3.4.bin.WIN64\include\GLFW

头文件配置 在include目录下创建GLFW文件夹:
xxx\VS2022\VC\Tools\MSVC\14.31.31103\include\GLFW
放入glfw3.h。
库文件配置 将以下文件复制到lib目录:
xxx\VS2022\VC\Tools\MSVC\14.31.31103\lib\x86
glfw3.libglfw3_mt.libglfw3dll.lib
动态链接库配置 64位系统将glfw3.dll复制到C:\Windows\SysWOW64。
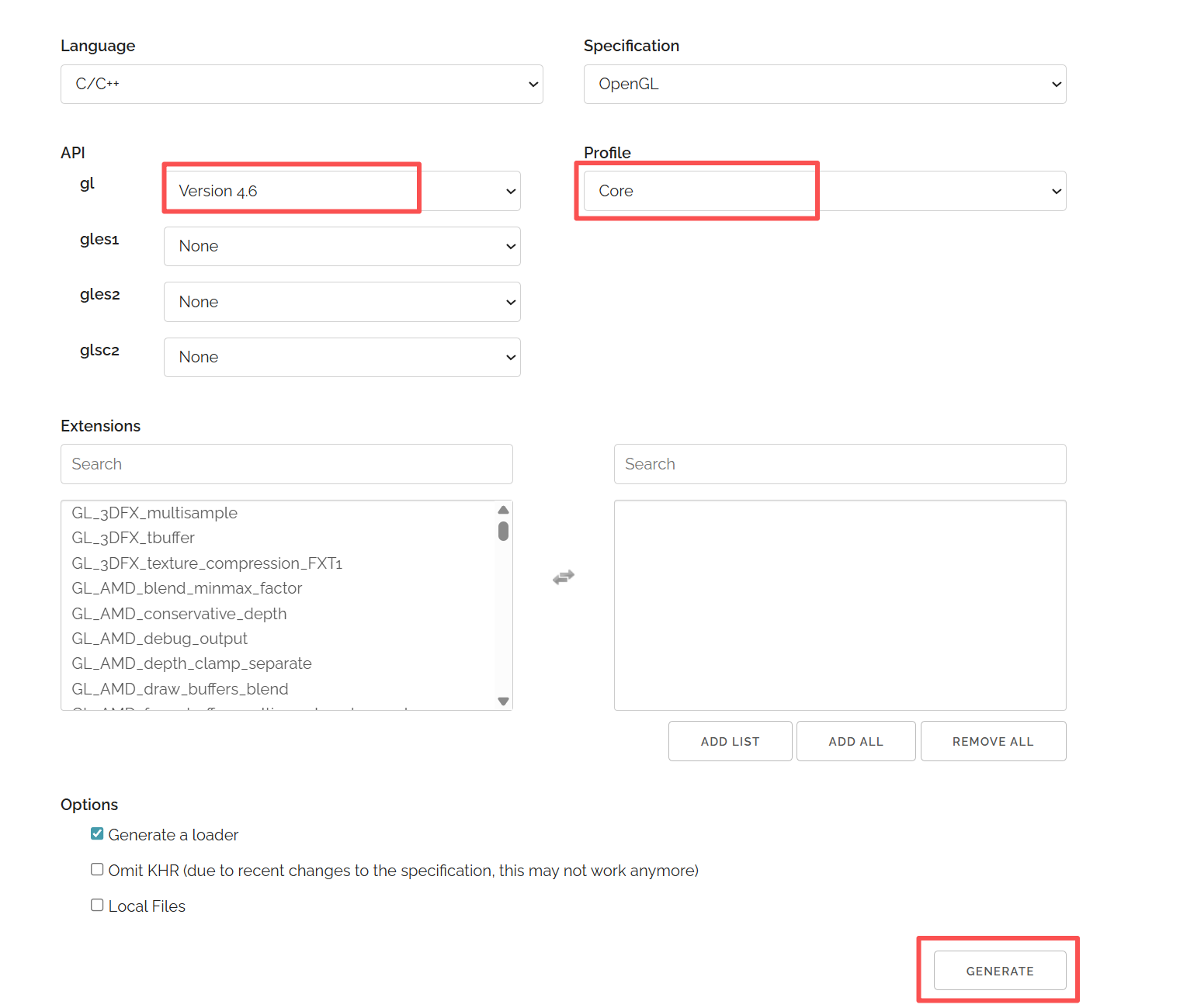
GLAD安装步骤
通过在线服务生成配置(https://glad.dav1d.de),选择以下参数:
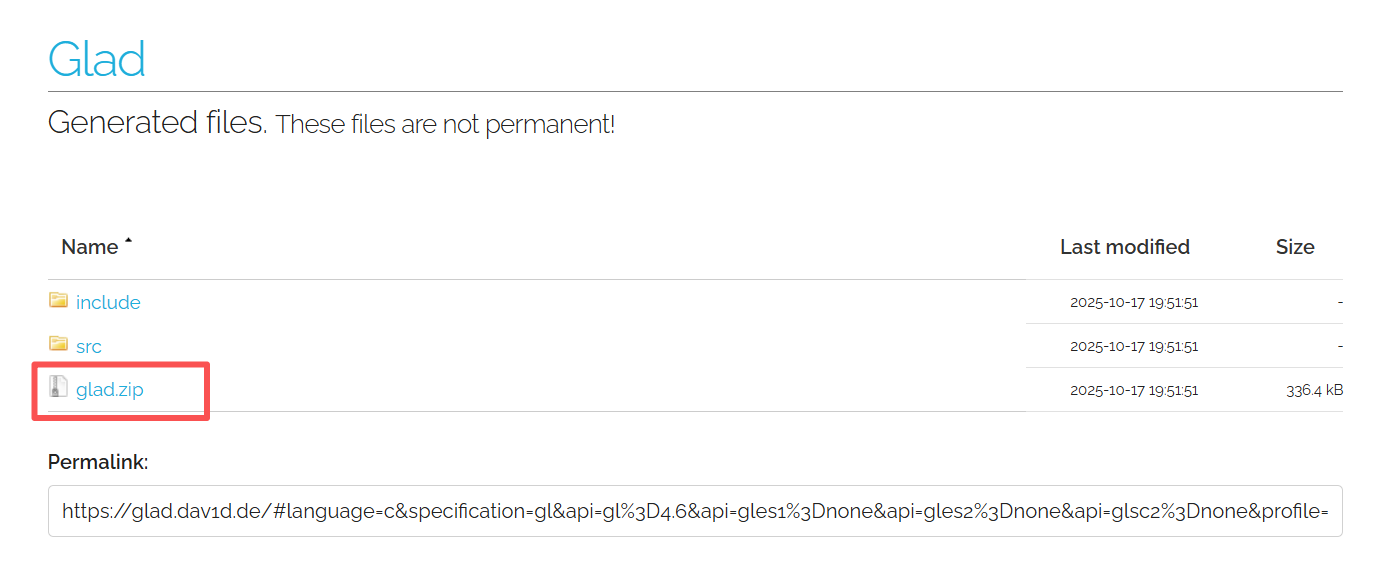
下载生成的ZIP文件后:
- 将
glad/include下的glad和KHR文件夹复制到VS的include目录。 - 项目中使用时,如果需要用GLAD,将
glad.c添加到项目源文件目录。
验证安装的方法
创建测试项目时,确保包含以下代码框架:
#include <glad/glad.h>
#include <GLFW/glfw3.h>
int main() {
glfwInit();
GLFWwindow* window = glfwCreateWindow(800, 600, "Test", NULL, NULL);
glfwMakeContextCurrent(window);
gladLoadGLLoader((GLADloadproc)glfwGetProcAddress);
// 渲染循环...
glfwTerminate();
return 0;
}
若编译运行无报错且显示空白窗口,则说明环境配置成功。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










