




 本文介绍组合导航实用技巧,包括ZUPT和CUPT。ZUPT即零速修正,能提高纯惯导导航精度,有零成本等优点,但有应用场景限制;CUPT是坐标更新,可在无高精度外部辅助时减少导航误差积累。还提及采样时刻不同步问题及惯导结果外推方法。
本文介绍组合导航实用技巧,包括ZUPT和CUPT。ZUPT即零速修正,能提高纯惯导导航精度,有零成本等优点,但有应用场景限制;CUPT是坐标更新,可在无高精度外部辅助时减少导航误差积累。还提及采样时刻不同步问题及惯导结果外推方法。
文章目录
组合导航中的实用技巧
实用更新1 - ZUPT
概念
零速修正(Zero velocity UPdaTe,ZUPT)
在无连续外部更新的情况下,速度漂移会带来位置和姿态的精度发散,而零速修正能够显著提高纯惯导的导航精度
操作过程
◼ 每2-4分钟停车一次,每次停车30-60 s
◼ “速度为零”这一信息用作卡尔曼滤波的量测更新
ZUPTs的优点
◼ 几乎零成本(无需额外设备)
◼ 不需要精确的时间同步
局限性
◼ 必须有条件让载体静止(不适于空中和海上的应用)
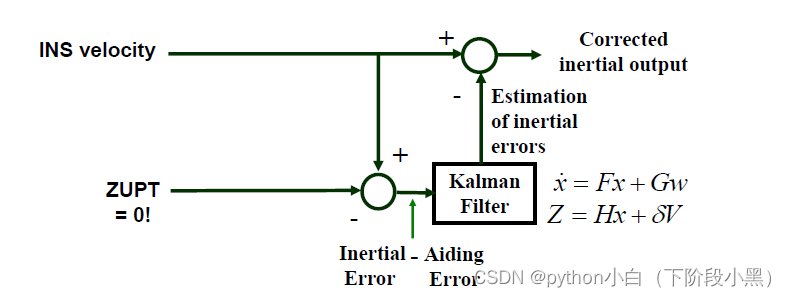
ZUPT如何提高惯导测量精度
◼ 为修复两次ZUPT修正之间INS速度误差,需要采用最优估计算法(例如卡尔曼滤波)
◼ 每次ZUPT修正时,将INS输出的三轴速度与ZUPT速度(零速)之差作为量测信息输入到卡尔曼滤波中
两个因素影响 ZUPT的效果
连续两次ZUPTs修正之间的时间间隔 ,期间速度误差随时间增长
ZUPTs 更新时长需合理选择 ,使得卡尔曼滤波充分收敛
ZUPT的重要性
限制速度误差的增长 ,将速度重置为零
估计加速度零偏误差
估计水平姿态角误差
总结
总体上,ZUPT可有效限制大部分的惯导长期





















 102
102

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












