





MATLAB代码,面向二维平面固定目标定位场景,构建了由 4 个固定基站和 1 个待定位目标组成的 AOA 定位仿真环境。程序首先随机生成目标与基站坐标,并在真实方位角和距离观测中加入噪声,用于模拟实际测量误差。随后分别实现“不带距离辅助的 AOA 定位”和“带距离辅助的 AOA 定位”两种方法:前者主要依据多个基站的方位角交汇完成目标位置估计,后者进一步引入测距信息对方位估计结果进行辅助修正。程序最终通过二维定位散点图和 x、y 两个方向的 RMSE 柱状图,对两种定位策略的估计坐标、坐标轴误差以及二维位置误差统计结果进行直观对比,可用于展示距离辅助信息对 AOA 定位精度提升的作用。
定位方法说明: 本项目本质上是 AOA 定位,测距信息只作为辅助约束引入;带距离辅助的 AOA 定位是在纯 AOA 定位基础上的精度增强方法。二维版本保留原三维版本的授权文件和代码介绍文件配置要求。
原创代码,请勿翻卖
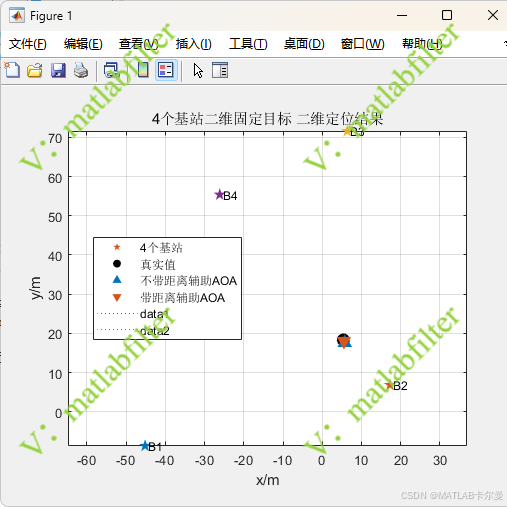
运行结果
定位示意图:
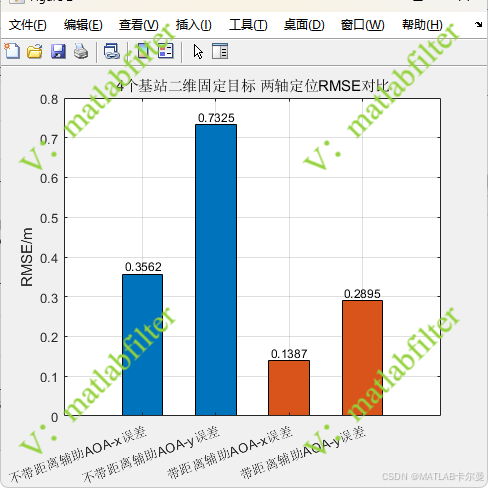
误差对比:
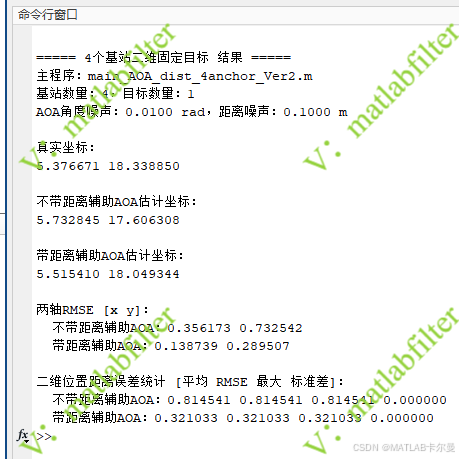
命令行输出:
MATLAB源代码
完整代码如下:
% AOA二维定位,测距仅作为辅助精度增强
% 作者微信:matlabfilter(可联系获取完整例程、个性化定制和讲解)
% 本代码本质是AOA定位,测距只作为辅助信息。
% 2026-06-10/2D:由三维空间版本重新整理为二维平面定位版本
% 2026-06-26/Ver3:优化显示效果
%% 初始化
clc; clear; close all;
rng(0);
%% 参数设置
num_station = 4;
num_target = 1;
scene_name = '4个基站二维固定目标';
target_scale = 10;
station_scale = 20;
AOA_noise = 1e-2;
distance_noise = 0.1;
if num_station < 2 || mod(num_station, 1) ~= 0
error('num_station必须为不小于2的整数,二维AOA定位建议设置为2或更多。');
end
position = target_scale * randn(num_target, 2);
stations_position = station_scale * randn(num_station, 2);
estimated_positions_AOA1 = zeros(num_target, 2);
estimated_positions_AOA2 = zeros(num_target, 2);
for i1 = 1:num_target
[estimated_positions_AOA1(i1, :), estimated_positions_AOA2(i1, :)] = ...
estimateAoaRange2D(stations_position, position(i1, :), AOA_noise, distance_noise);
end
%% 误差统计
err_AOA1 = estimated_positions_AOA1 - position;
err_AOA2 = estimated_positions_AOA2 - position;
dist_err_AOA1 = vecnorm(err_AOA1, 2, 2);
dist_err_AOA2 = vecnorm(err_AOA2, 2, 2);
axis_rmse = [
sqrt(mean(err_AOA1.^2, 1));
sqrt(mean(err_AOA2.^2, 1))
];
完整代码:https://download.csdn.net/download/callmeup/93043287
课题推荐
相关前沿课题推荐:
-
面向 NLOS 环境的 AOA/距离融合鲁棒定位算法研究
-
面向移动目标的 AOA-Range 联合动态跟踪与滤波算法研究
-
基于 UWB 与 AOA 融合的室内高精度二维/三维定位方法
-
面向少基站场景的 AOA/TDOA/距离混合定位可观性分析
-
基于图优化的多基站协同 AOA 定位与误差抑制方法
-
面向智能交通场景的车联网 AOA 辅助协同定位技术
-
基于 RIS/STAR-RIS 辅助的 AOA 定位增强方法
-
面向无人机集群的 AOA-Range 协同定位与队形保持方法
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我


















 228
228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












