



第1章 车辆在碰撞过程中的结构行为
1.1 耐撞性结构与碰撞现象学方面
车身必须在车辆行驶过程中承受静态和动态应力,以确保足够的弯曲刚度和扭转刚度,并在事故发生时保护车内乘员。
目前大多数在产车辆所采用的车身类型是模压钢板制成的单体壳(承载式车身)(Fenton,1999; Heisler,2002)。承载壳体由通过点焊连接而成的复杂形状的细小构件组成的空间结构构成。这些构件通过其刚度参与车身的结构行为。地板总成由纵梁、平板、横梁、轮拱以及可能存在的传动通道构成。侧支柱和上部车顶结构固定在地板总成上;这些支柱被称为A柱、B柱和C柱,它们定义了车身的形状。
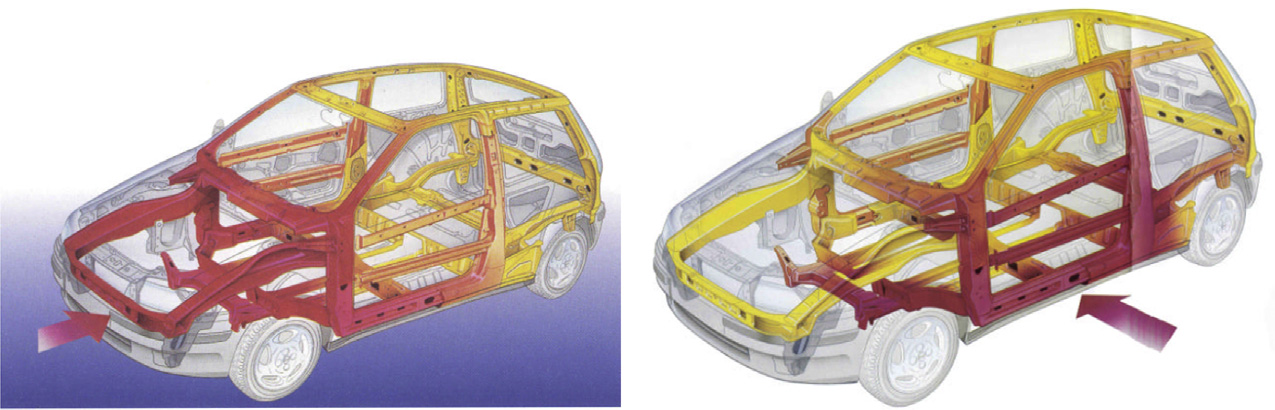
在发生正面或侧面碰撞时,单体壳体的不同结构会受到影响,如图1.1所示。
在某些车辆中,通常是商用车、越野车辆以及一些运动型多用途汽车(SUV)和多用途汽车(MPV),车身采用独立底盘制成,通过纵梁(非承载式车身或梯形车架)实现。这种底盘由一个基本为平面的结构组成,包括两条纵向元件(纵梁),并通过多个横向元件(横梁)连接,负责提供抗侧向力能力并赋予扭转刚度(参见图1.2)。
近年来,关于“空间框架”(SF)几何结构的车身制造已得到广泛应用,尤其适用于铝合金材料。空间框架由杆件网络构成,这些杆件通过刚性接头在端部连接,通常采用铸造方式制成,形成空间几何结构。该空间框架结构承担着动力总成和底盘部件的支撑功能。

此外,空间框架结构还承担着为车辆提供足够刚度以及在事故发生时保护乘客的结构功能(图1.3)。
耐撞性结构设计的核心思想是预设一个压溃区,该区域可在碰撞过程中吸收车辆的动能,可能降低加速度。例如,在正面碰撞中,前部结构的刚度决定了碰撞过程中的加速度脉冲。该加速度脉冲应具有特定的形状,以最小化对乘员的风险。在剧烈碰撞过程中,存在三个基本阶段(维特曼,1999),如下所述:
- 碰撞起始阶段。在此阶段,必须触发安全带预紧器和安全气囊的传感器。为了实现最佳的传感器触发,汽车前部应具有足够的刚度,以便在短时间内产生高于约6 km/h触发值的速度变化。
- 安全气囊展开阶段。在此阶段,安全气囊充气膨胀,乘员在相对于汽车具有相对速度的情况下向前移动并拉紧安全带。为了尽量减少与安全气囊碰撞造成的伤害,此阶段汽车的减速度应足够低,这意味着结构刚度应相对较低。
- 乘员接触阶段。在此阶段,乘员已撞击到安全气囊,乘员与汽车之间形成刚性接触。此阶段可能出现较高的减速度,因为乘员不会再因与车内部件接触而承受进一步的冲击载荷。正面车身结构应具备足够的刚度,以便在剩余时间内实现显著的减速度。
研究表明(布兰特曼,1991),在碰撞速度为48公里/小时的情况下,为实现乘员最佳安全性,第一阶段持续时间为10至30毫秒,第二阶段持续35毫秒,最后一阶段则占据剩余时间,总时长最多为90毫秒。
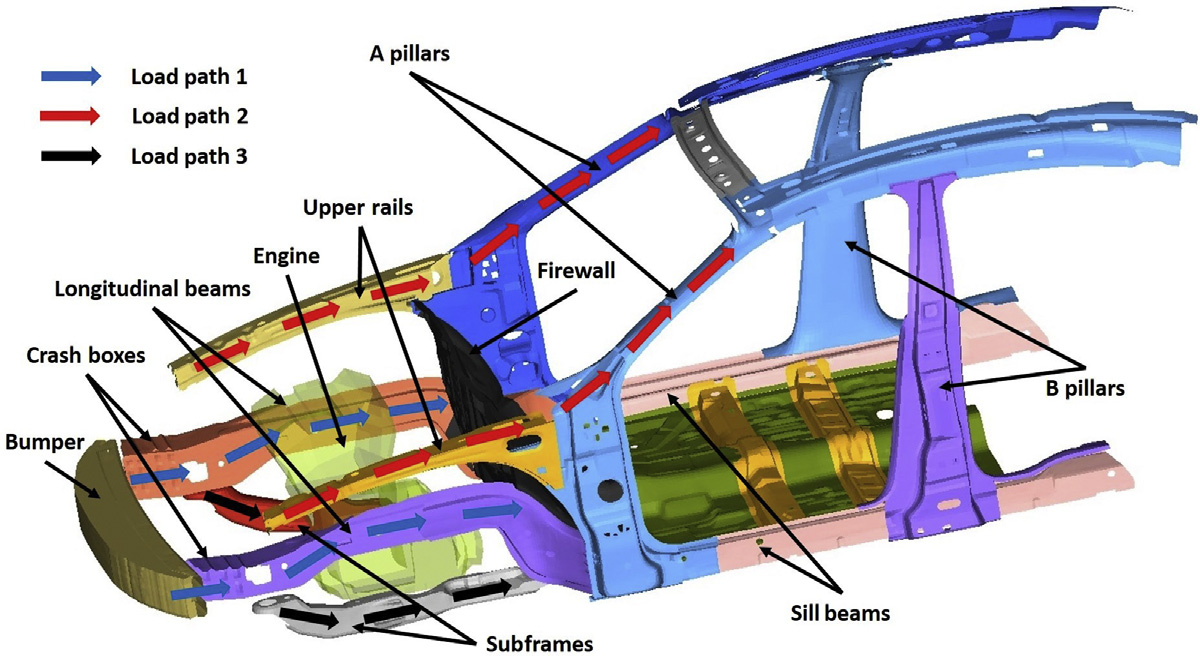
耐撞性结构的设计过程旨在控制载荷传递路径并优化吸能过程和加速度脉冲。例如,现代轿车前部结构中存在多条载荷路径,如图1.4所示:
路径1:附件—保险杠—碰撞盒—纵梁
路径2:上部纵梁— A柱
路径3:副车架—门槛梁
三条路径中的部件具有可变形性,能够吸收冲击能量。值得注意的是,在大多数正面碰撞中,第一条路径吸收了超过50%的总碰撞能量(Griˇskevicius and Ziliukas, 2003)。

一些加强部件可用于增强纵梁强度并优化能量吸收。在大多数情况下,这些部件在正面碰撞中的变形并非同时发生,而是从前部到后部依次进行。实际上,在车辆的每个部分,力必须平衡碰撞过程中减速的车辆后部的惯性(参见图1.6)。因此,最大的力通常出现在与障碍物接触点附近,因为此处承受的是整车的惯性。
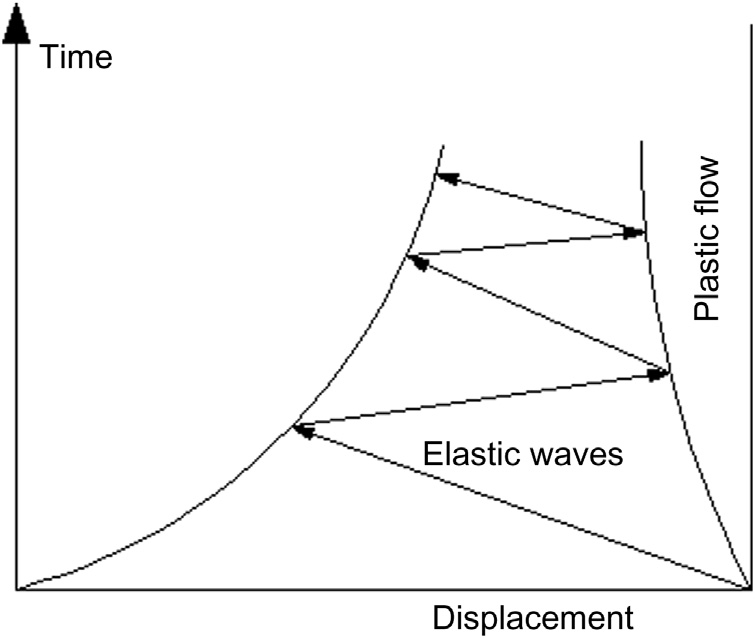
碰撞过程中,应力最大的结构会发生屈曲(琼斯,2012;斯特龙格,2000),并伴随各个元件的塑性坍塌。随着碰撞阶段的进行,这些塑化区会从撞击区向外扩展到更远的区域。宏观上,一种波或塑性流动从靠近障碍物的区域向前推进,并影响随着车辆与障碍物之间的接近运动,逐渐波及更远的区域,其传播速度由车辆与障碍物的接近运动决定。伴随着塑性流动,弹性波在车辆结构内部传播,其速度更快,等于结构材料中的声速。这些弹性波经历多次反射路径来回传播,影响整个结构,引起整个结构的振动。整个过程在图1.7中以示意图形式表示。
除了可变形部分外,车辆前部结构中的某些部件应具有足够的强度。在大多数耐撞性研究中,发动机和防火墙通常被视为刚体。特别是防火墙,指的是发动机舱与乘客舱之间的刚性墙。当车辆发生碰撞时,防火墙可以防止乘客舱的侵入,从而为驾驶员和乘客确保足够的生存空间。
1.2 脉冲加速度曲线
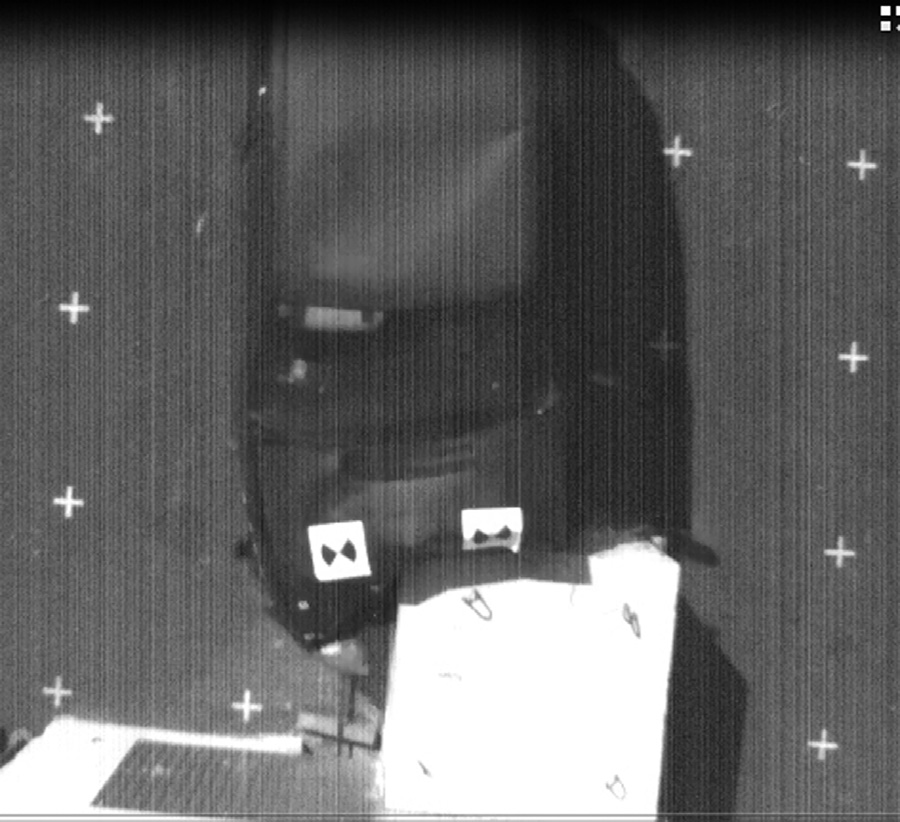
考虑一个碰撞试验,如图1.8所示,其中一辆车辆与刚性的、平坦的、不可移动屏障发生正面碰撞。车辆的前部区域因塑性流动而受到影响,在与障碍物直接接触时发生变形,并产生诱发变形。后者可能扩展到直接接触区域之外,有时甚至延伸至远离直接接触影响区域的非连续区域。诱发变形既由与障碍物直接接触的结构变形引起,也由惯性载荷引起,这些惯性载荷在一定程度上影响了车辆的大部分结构。观察图1.8,我们可以注意到车顶棚上有一处褶皱,距离直接接触区域较远。
塑性流动区域内的部件减速度与车辆其余部分的减速度不同。事实上,在塑性流区,部件会经历急剧的减速度并逐渐停止,而车辆的其余部分仍在接近障碍物。通过在车辆不同位置安装加速度计,预计会得到不同的减速度/时间曲线。此外,必须考虑到在整个碰撞时间内,整个结构都会受到弹性波传播的影响,因此在各个点位,由于结构的振动,预计会出现不同的减速度振荡。
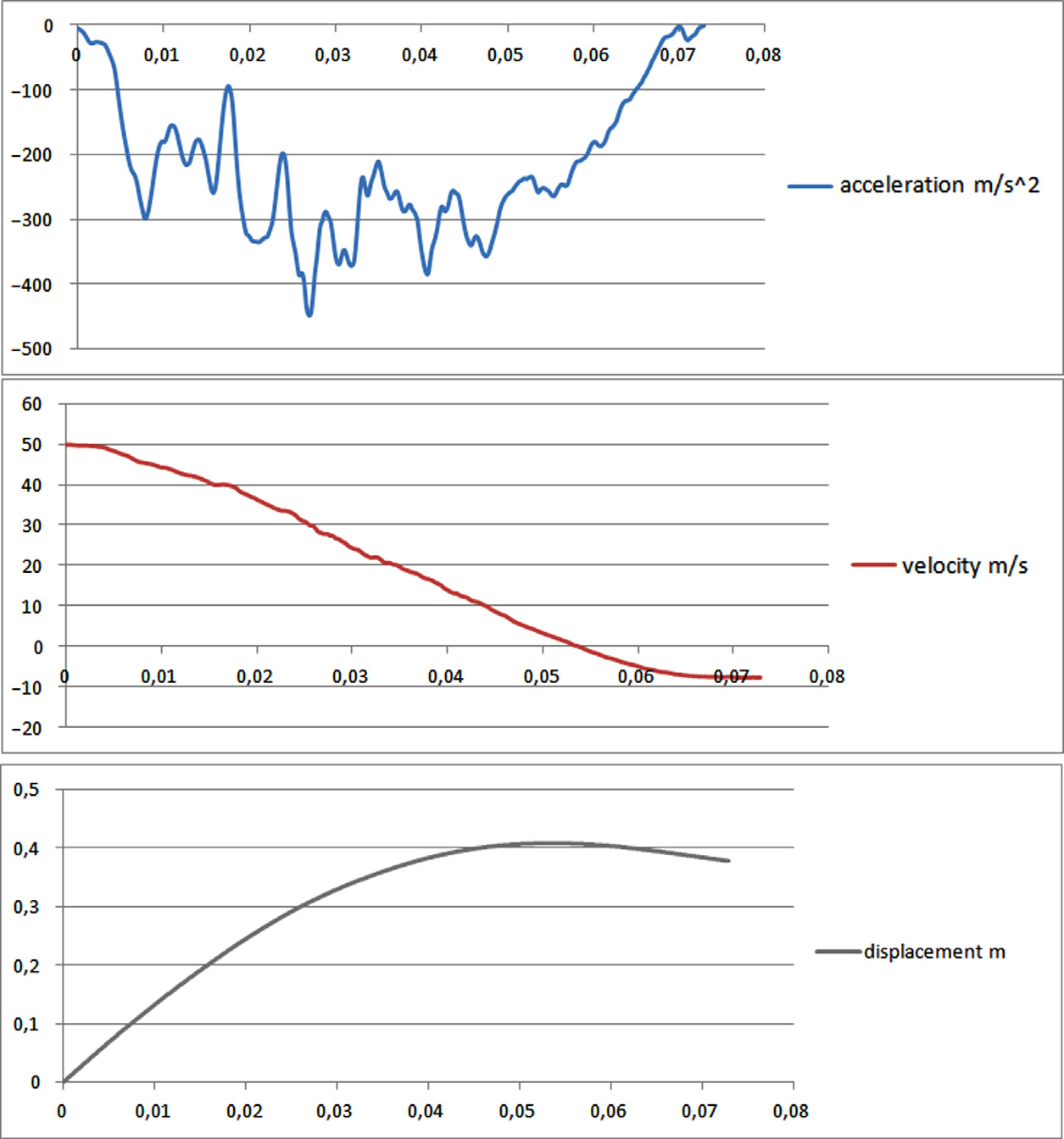
图1.9显示了在正面全宽碰撞过程中,靠近重心处的加速度计测得的典型纵向加速度a(t)变化情况。最大加速度的值和碰撞持续时间取决于初始碰撞速度V。
加速度曲线通常通过对加速度计数据进行滤波获得。滤波器的截止频率和处理方法由SAE J211标准规定。定义了四通道频率等级(CFC),具有不同的截止频率。对于整车对比、碰撞仿真输入和障碍壁面力,截止频率为60Hz,而用于速度或位移积分的截止频率为180赫兹。采用四极点线性相位巴特沃斯滤波器,其差分方程如下所示:
$$
Y[t] = a_0X[t] + a_1X[t-1] + a_2X[t-2] + b_1Y[t-1] + b_2Y[t-2] \quad (1.1)
$$
其中,X[t]为输入数据序列;Y[t]为滤波后的输出数据序列;a₀, a₁, a₂, b₁, b₂为滤波系数,取决于CFC;t为采样率(单位:秒)。
滤波器系数根据ISO 6487计算:
$$
w_d = 2\pi CFC \times 2.0775 \
w_a = \frac{\sin(w_d T / 2)}{\cos(w_d T / 2)} \
a_0 = \frac{w_a^2}{1 + \sqrt{2} w_a + w_a^2} \
a_1 = 2a_0 \
b_1 = -2(w_a^2 - 1)/(1 + \sqrt{2} w_a + w_a^2) \
b_2 = (1 - \sqrt{2} w_a + w_a^2)/(1 + \sqrt{2} w_a + w_a^2)
\quad (1.2)
$$
差分方程描述了一个二阶滤波器。为了实现四阶滤波器,数据必须两次通过该二阶滤波器:一次正向,一次反向,以防止相位偏移。
必须采用特殊技术来消除滤波数据集中滤波器启动效应的影响。
在图1.9中还给出了通过数值积分在重心位置测得的加速度曲线获得的速度 V(t) 和位移 x(t) 随时间变化的曲线。对于刚性障碍物,位移表示车辆前部变形过程中车辆重心的移动,并且由于障碍物不可移动,在变形过程中重心位置变化可忽略的情况下,其值等于车辆自身的压溃量。如果障碍物是可压溃的,则通过积分得到的位移为相互压溃量,即车辆与屏障的压溃之和。
1.2.1 形心时间
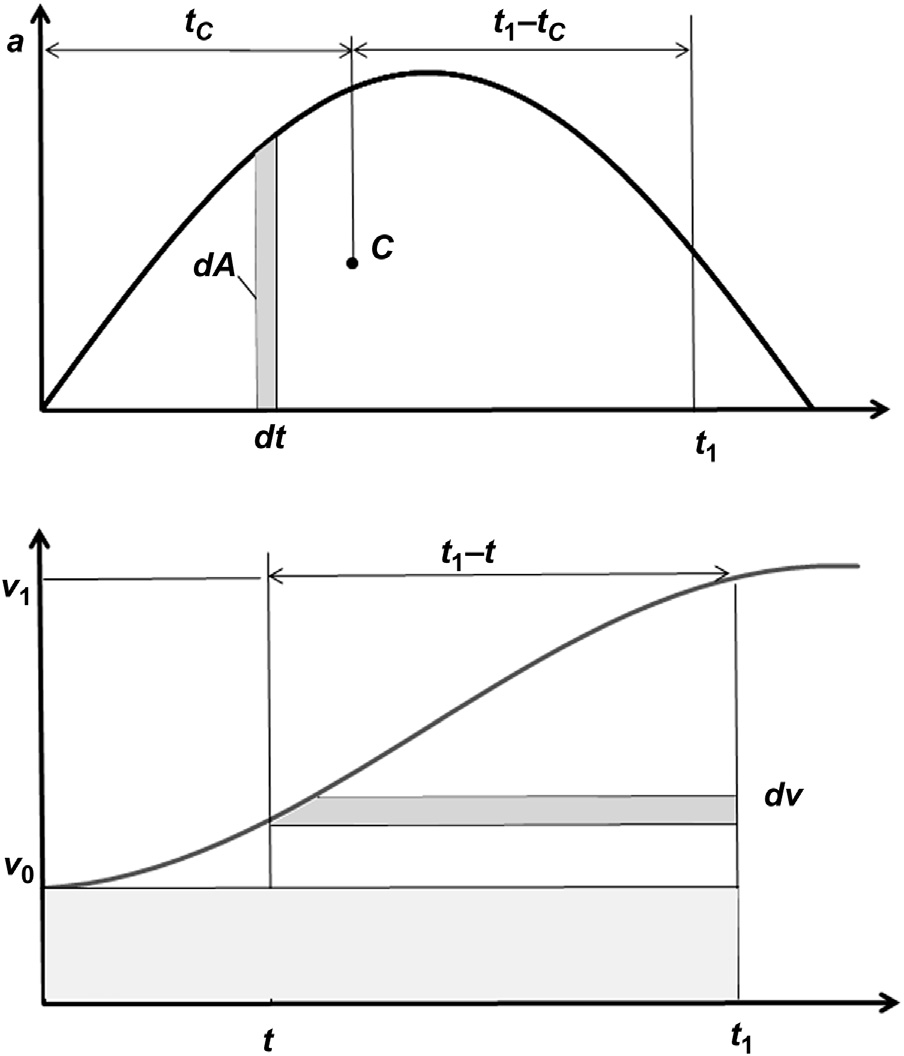
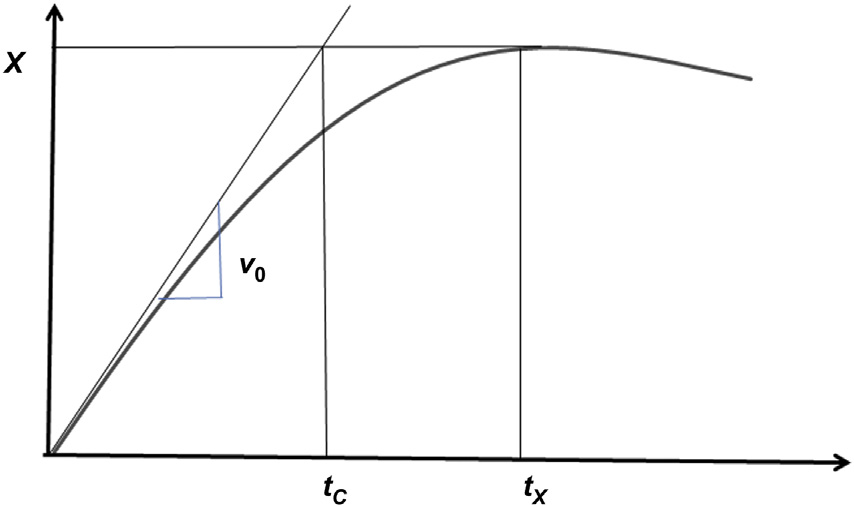
由加速度计数据通过所谓的面积矩法进行一次积分,也可获得空间 时间曲线。该方法给出了最大动态压溃X、相应的速度变化以及碰撞脉冲形心时间tC之间的运动学关系。形心C是加速度曲线从零时刻到动态压溃时刻tx之间所围面积的几何中心。
给定一个通用的加速度 时间曲线,假设 V(0) = V₀, 通过积分,我们得到速度 时间曲线,如图1.10所示。
从时间t₀到时间t₁的位移变化x₁−x₀, 等于V(t)曲线下的面积。该面积可计算为矩形面积V₀t₁加上t(v)曲线下的面积:
$$
x_1 - x_0 = V_0 t_1 + \int_{v_0}^{v_1} (t_1 - t) dV \quad (1.3)
$$
作为 dV = a dt,假设微分面积 a dt = dA,t₁ − t = y,我们得到
$$
\int_{v_0}^{v_1} (t_1 - t) dV = \int_{t_0}^{t_1} (t_1 - t) a dt = \int y dA \quad (1.4)
$$
Eq.(1.4)表示曲线t₁轴以下从 0 到t(t)的面积对t₁轴的静矩。
令 t₁ − t = Y ,我们可以写出
$$
\int y dA = Y^
A = (t_1 - t^
) \int_{0}^{t_1} a dt \quad (1.5)
$$
t*是加速度曲线从零时刻到时间t₁所定义区域的几何中心对应的时间。将式(1.5)替换为式(1.3),我们得到
$$
x_1 - x_0 = V_0 t_1 + (t_1 - t^*) \int_{0}^{t_1} a dt \quad (1.6)
$$
其中积分是 a(t)曲线 在 0 和 t₁ 之间的面积。
Eq.(1.6)是位移方程,该方程在未使用加速度计数据的双重积分的情况下获得。
形心时间 tC是碰撞脉冲从零时刻到动态压溃时间X的面积的几何中心处的时间,可以使用公式(1.6)计算。
在固定刚性障碍物碰撞中,当动态压溃v=0时,因此
$$
\int_{0}^{t_1} a dt = V_1 - V_0 = 0 - V_0 = -V_0 \quad (1.7)
$$
as x₀ = 0, 由公式 (1.6)可得
$$
X = V_0 t_1 + (t_1 - t^
)(-V_0) = V_0 t^
= V_0 t_C \quad (1.8)
$$
且形心时间被简化为
$$
t_C = \frac{X}{V_0} \quad (1.9)
$$
由于X是动态压溃,V₀是车辆与刚性障碍物的碰撞速度,因此tC是单位碰撞速度下的压溃量,定义为车辆结构的特征长度。
tC的倒数,即β₁, 与车辆刚度相关,该内容在第3章《车辆结构行为模型》中给出。
形心时间可根据碰撞试验的位移‐时间历史曲线来确定,如图1.11所示,在零时刻绘制斜率(该斜率为初始壁障碰撞速度,V₀);该斜率与通过动态压溃X的水平线相交于时间tC处。
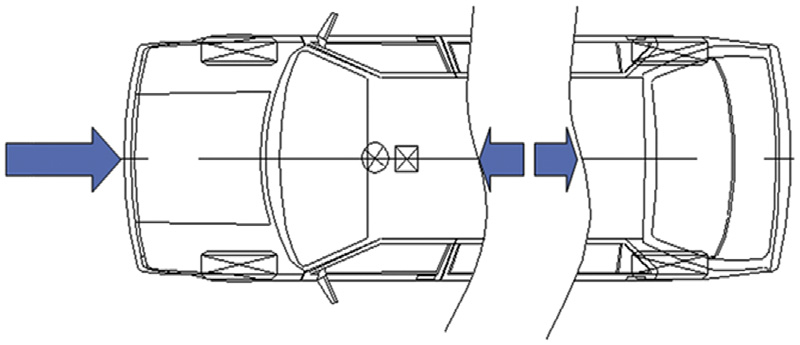
在车对车碰撞的一般情况下,两辆车的形心时间相同。在这种情况下,形心时间可使用公式(1.9)计算,其中X表示相互压溃(两辆车动态碰撞的总和),V₀为两辆车的接近速度。
1.3 力‐变形曲线
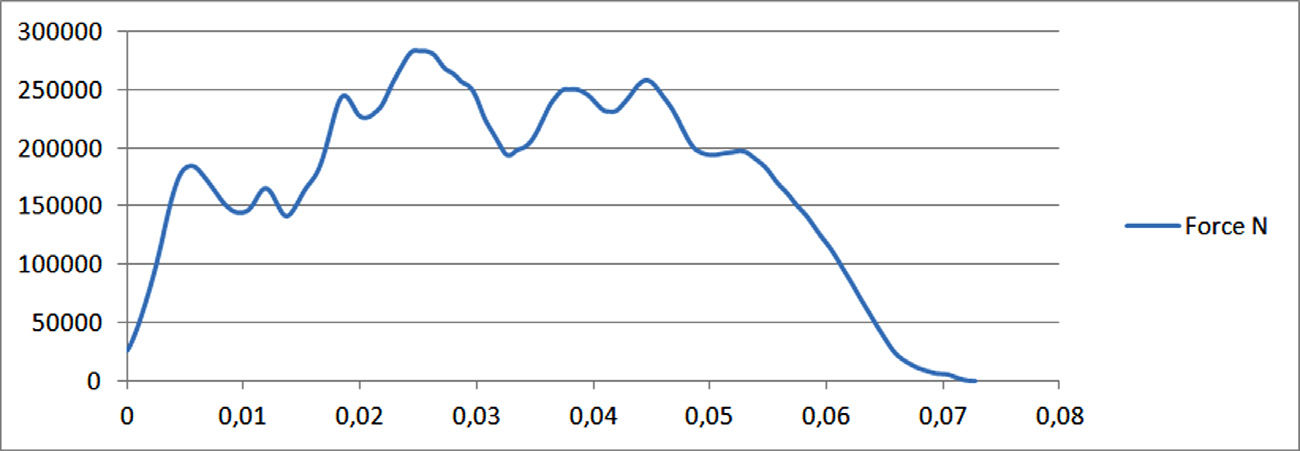
碰撞过程中与障碍物的接触力可以通过安装在障碍物上的负荷传感器进行测量。在图1.12中显示了安装在障碍物上的负荷传感器测得的合力,对应于图1.8中所述的碰撞。
然而,在适当的简化假设下,可以从加速度计数据评估力/时间曲线(Vangi, 2008;Huibers 和 De Beer, 2001)。假设如下:
- 车辆质量在碰撞过程中保持不变;没有发生具有显著质量的部件脱落。
- 在碰撞期间,运动质量等于整个车辆的质量。实际上,正如前面所述,经历塑性流动的一部分结构(如发动机)在与障碍物首次接触后便已停止运动,因此有效质量减少。这种减少部分被乘员的质量所补偿,乘员的质量在碰撞后期才发挥作用。
- 车辆变形并未显著改变车辆重心的位置。
- 在正面全宽碰撞情况下,加速度在靠近重心处测得;而在偏置碰撞情况下,则在碰撞侧的B柱附近测得。
根据这些假设,可以从加速度曲线a(t)出发,通过将加速度值乘以车辆质量,依据牛顿第一定律,来近似得到作用在车辆上的总力F(t)的曲线。
$$
F(t) = m a(t) \quad (1.10)
$$
通过从F(t)和x(t)曲线中消除时间变量,得到力关于位移的函数 F(x)曲线。由于障碍物是固定的,位移等于车辆变形加上障碍物可能发生的变形。
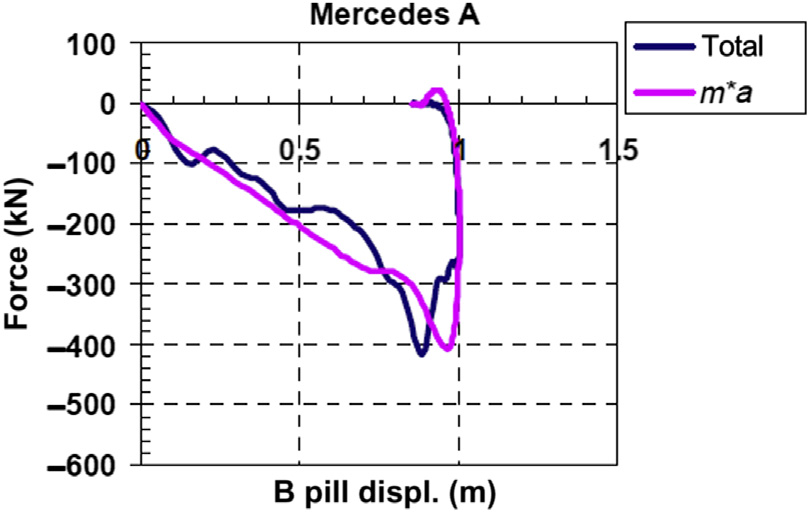
障碍物上的测力传感器数据与质量乘以加速度所得数据之间的相关性总体上较好。图1.13显示,例如,对梅赛德斯A级在40%偏置碰撞可变形屏障(如EuroNCAP测试)过程中,从测力传感器数据和ma获得的曲线进行比较。
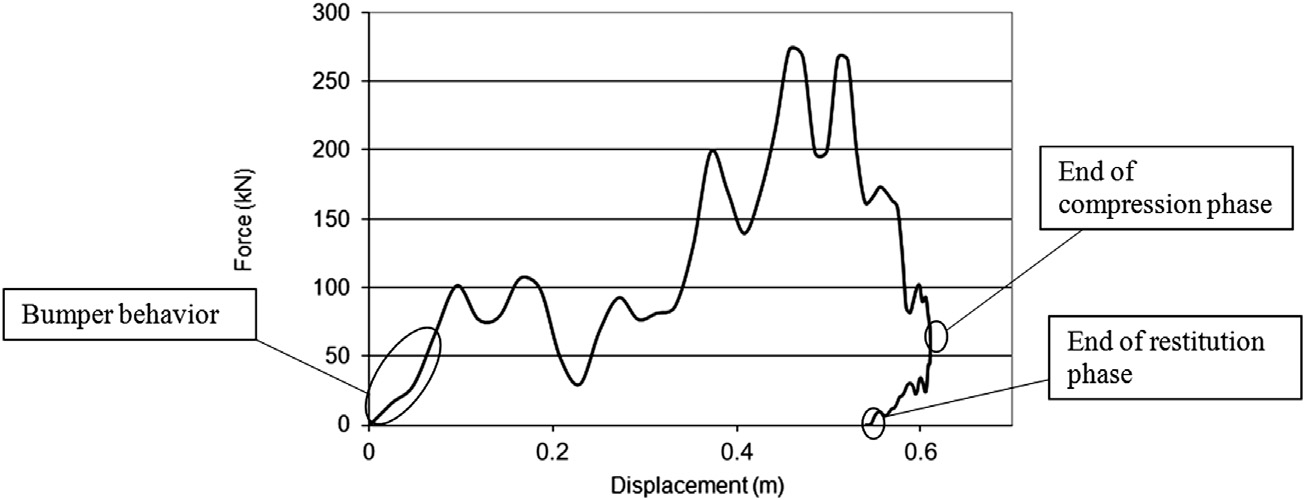
让我们分析一下图1.14中的曲线示例,其中 |F(x)| 曲线是从加速度计数据获得的。
该曲线具有两个明显不同的部分。第一阶段与结构的压缩有关,变形单调增加,但由于所涉及结构的不均匀性,力可能会出现振荡行为,并呈现出宽窄不一的峰值,直至达到最大变形。第二阶段为卸载阶段或弹性恢复阶段,此时变形减小,由于结构的弹性,变形得到部分恢复。在恢复阶段,F(x)曲线继续延伸,其趋势通常取决于压缩阶段达到的最大压溃程度,或等效地由碰撞速度决定。
F(x)曲线的初始部分与正面或追尾碰撞中保险杠及其连接结构的结构响应相关。根据ECE R42法规,在碰撞速度达到4公里/小时的轻微碰撞中,保险杠必须在不产生永久损坏的情况下吸收能量。因此,F(x)曲线第一段的斜率取决于保险杠的刚度。当作用力较大,支撑杆发生塑性屈服时,曲线表现出较软特性。
F(x)曲线从接触开始阶段到最大压缩阶段下的面积表示碰撞过程中整体吸收的能量Eₐ,而弹性恢复阶段对应的曲线下的面积表示该阶段恢复的弹性势能Eᵣ。这两个能量之差表示车辆变形所耗散的整体能量E_d。
压缩和恢复阶段曲线所包围面积的比值的平方根等于恢复系数:
$$
\varepsilon = \sqrt{\frac{E_r}{E_a}} \quad (1.11)
$$
1.4 碰撞力在时间和空间上的分布
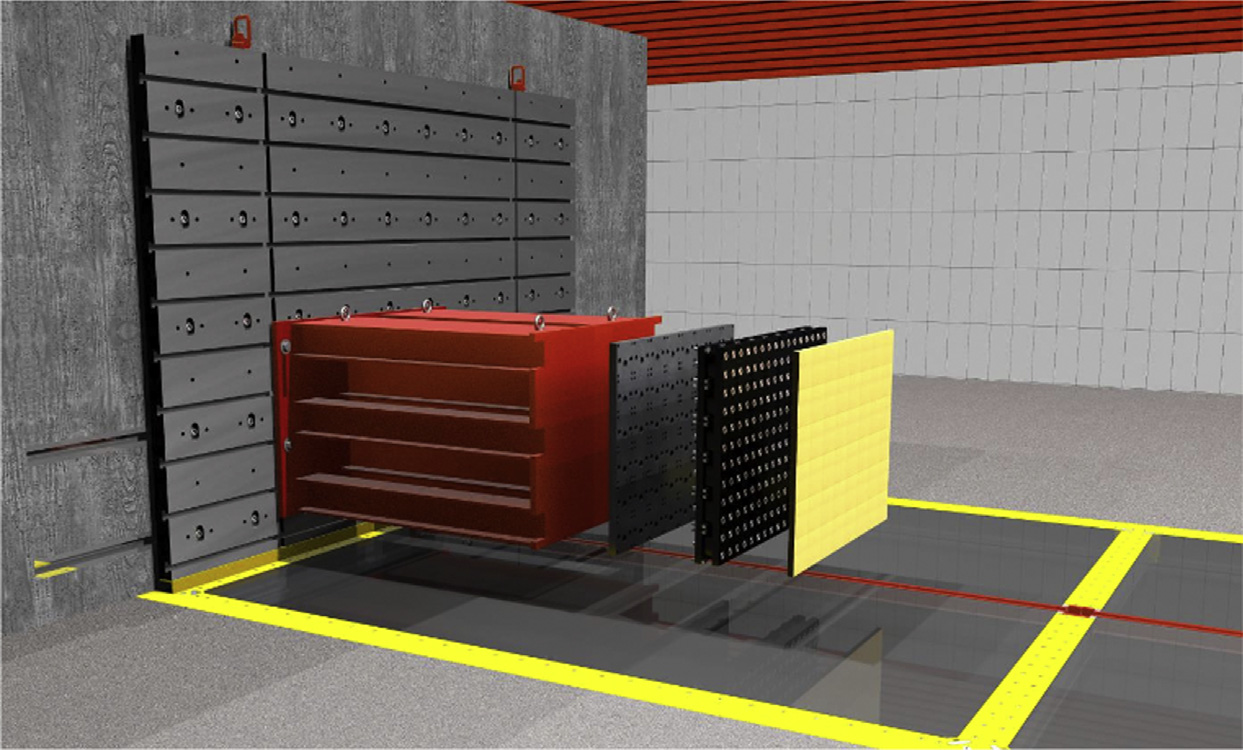
仪器化护栏不仅可以测量碰撞过程中撞击表面上的合力,还可以测量力的分布。图1.15显示了一个由多个布置在撞击表面上的负荷传感器组成的仪器化护栏。
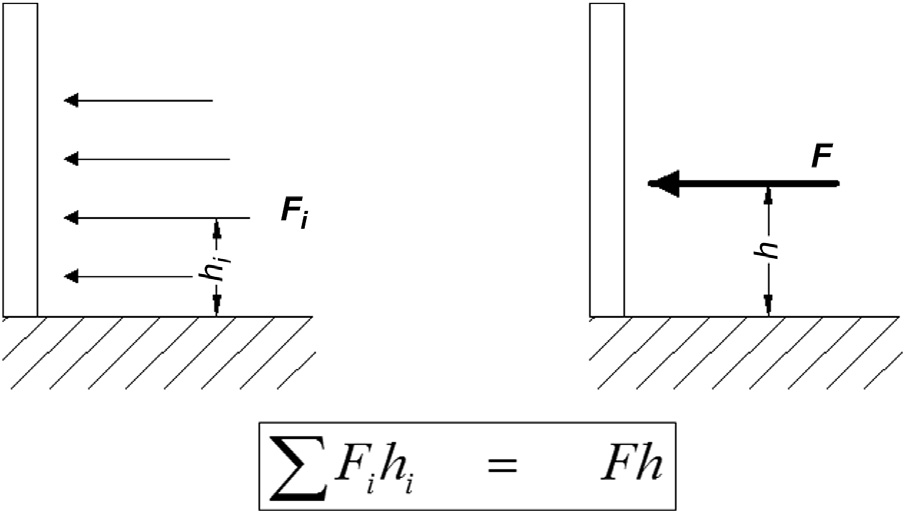
将所有测力传感器的值相加,得到合外力。车辆作用在障碍物上的力的平均高度如图1.16所示。
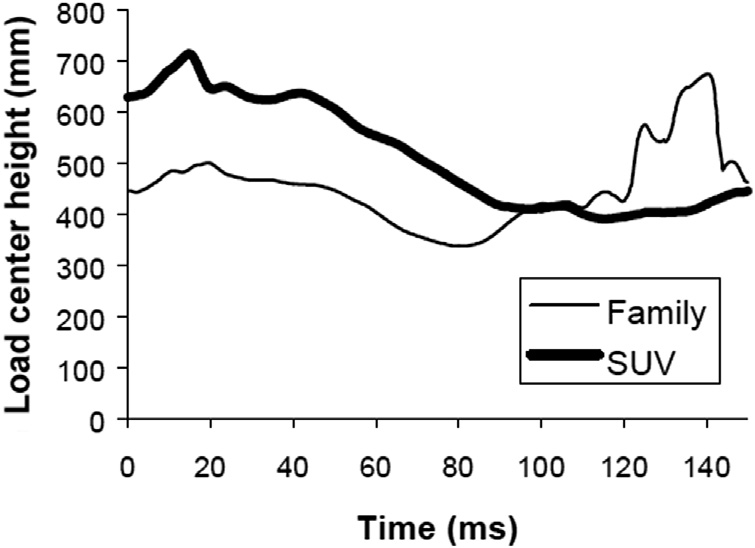
碰撞过程中,平均作用力高度通常会发生变化,如图1.17所示,针对两种类型的车辆:家用轿车和运动型多用途汽车。
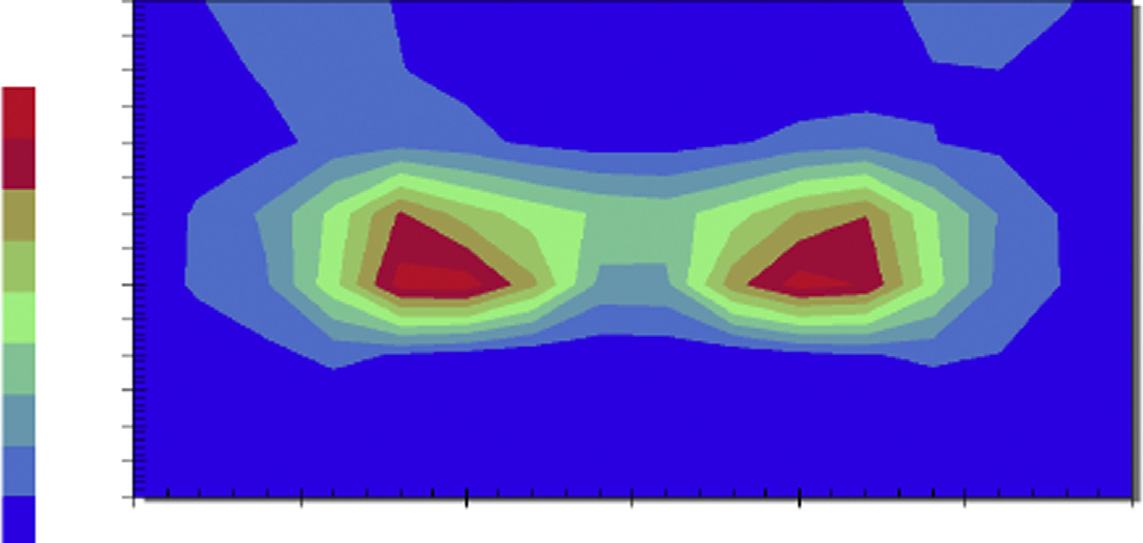
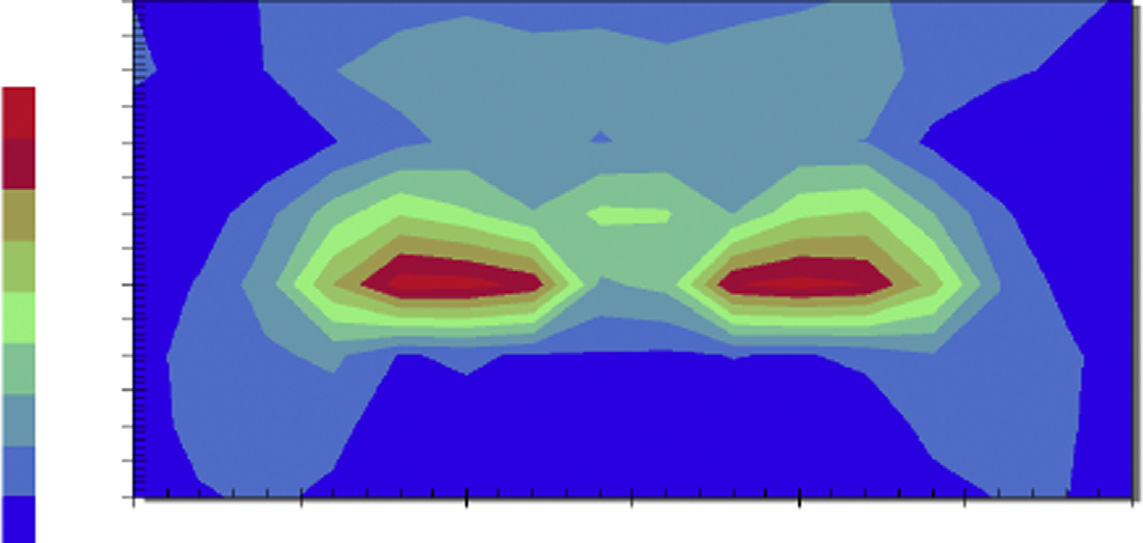
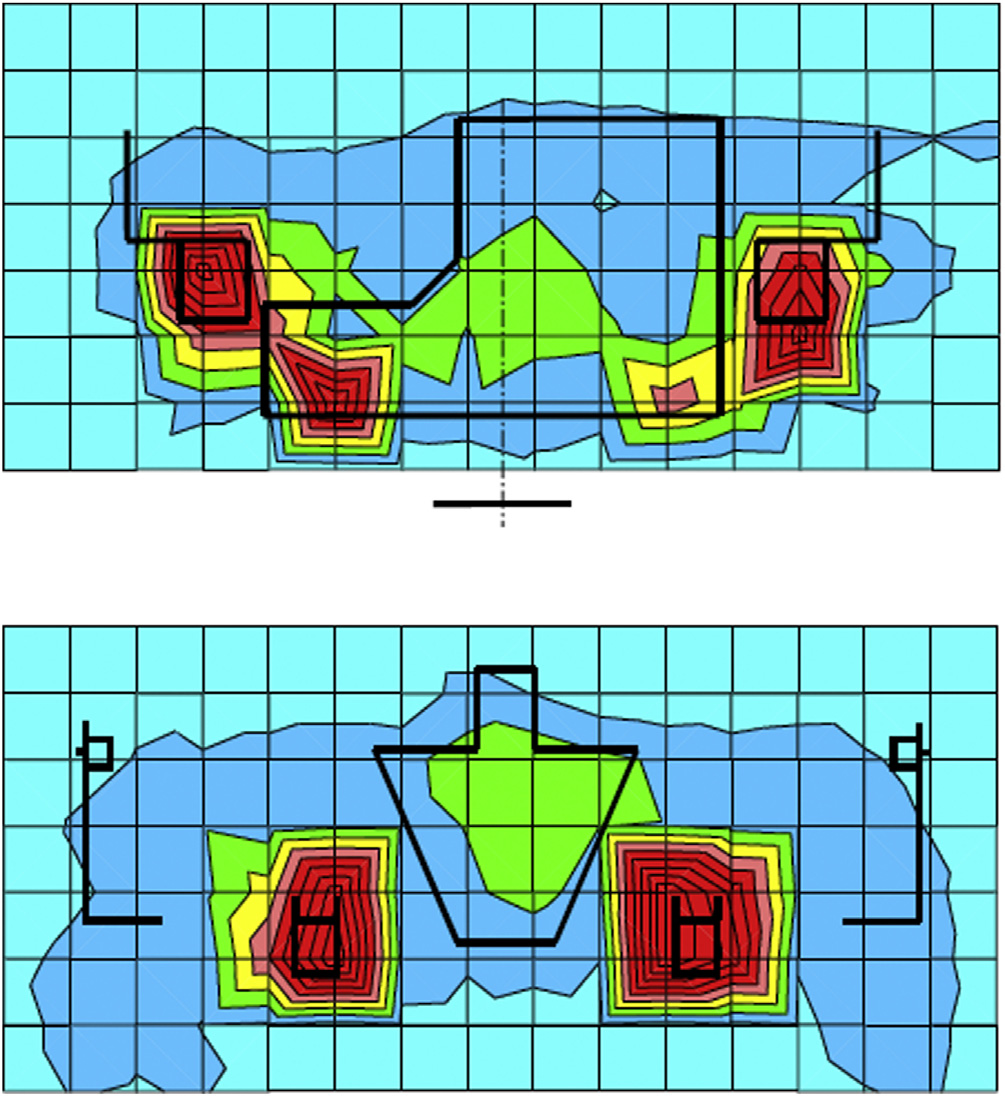
更普遍的情况是,碰撞过程中力的分布会发生变化。在图1.18和 1.19中显示了运动型多用途汽车在碰撞开始后34毫秒和56毫秒时的力的分布。力的峰值与纵梁位置相对应。而在图1.20中,显示了两种不同车辆——家用轿车和运动型多用途汽车的碰撞力分布。
1.5 影响力‐变形曲线的参数
F(x)曲线描述了车辆各部分(前部、后部等)在特定碰撞配置下的宏观结构响应。F(x)曲线通常是在与刚性或可变形障碍物的碰撞测试中获得的,但即使在与其他车辆的碰撞中,也可以很好地近似应用。也就是说,在一定的范围内,对于给定的碰撞配置,要产生相同的变形量,所需施加的力是相同的,无论与车辆发生碰撞的物体是刚性障碍物还是另一辆车辆。因此,该曲线是车辆的一个特性。然而,F(x)曲线取决于车辆型号、碰撞配置(带偏置、角度碰撞、骑上/钻入等),而仅在较小程度上受碰撞速度的影响。
1.5.1 车辆型号
不同的车辆型号、制造方式及架构会导致不同的结构行为,因此会产生不同的F(x)曲线。从宏观上看,车辆可以分为若干类别,例如中型家用轿车(如大众高尔夫或丰田卡罗拉)、大型轿车/行政级轿车(如奥迪 A6或梅赛德斯E200)、多用途车(MPV)(如大众夏朗或克莱斯勒 voyager)以及小型家用轿车(如大众波罗或标致206)。
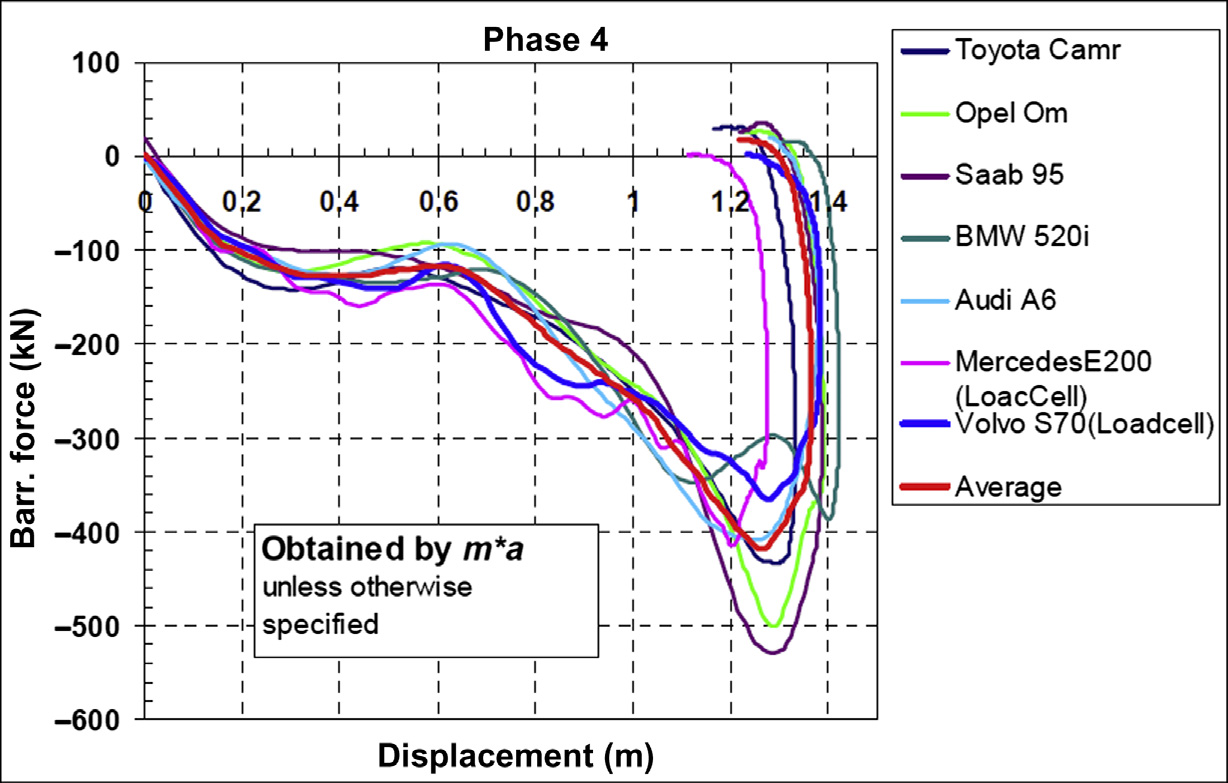
对于每个类别,车辆行为相当相似,但存在一些例外。例如, Huibers和De Beer (2001) 报告了使用可变形障碍物进行40%偏置碰撞试验的分析结果。力是通过测力传感器获得,或通过将测得的加速度乘以试验车辆的质量得到。由加速度乘以质量得出的力‐位移趋势与测力传感器数据得出的趋势相同。
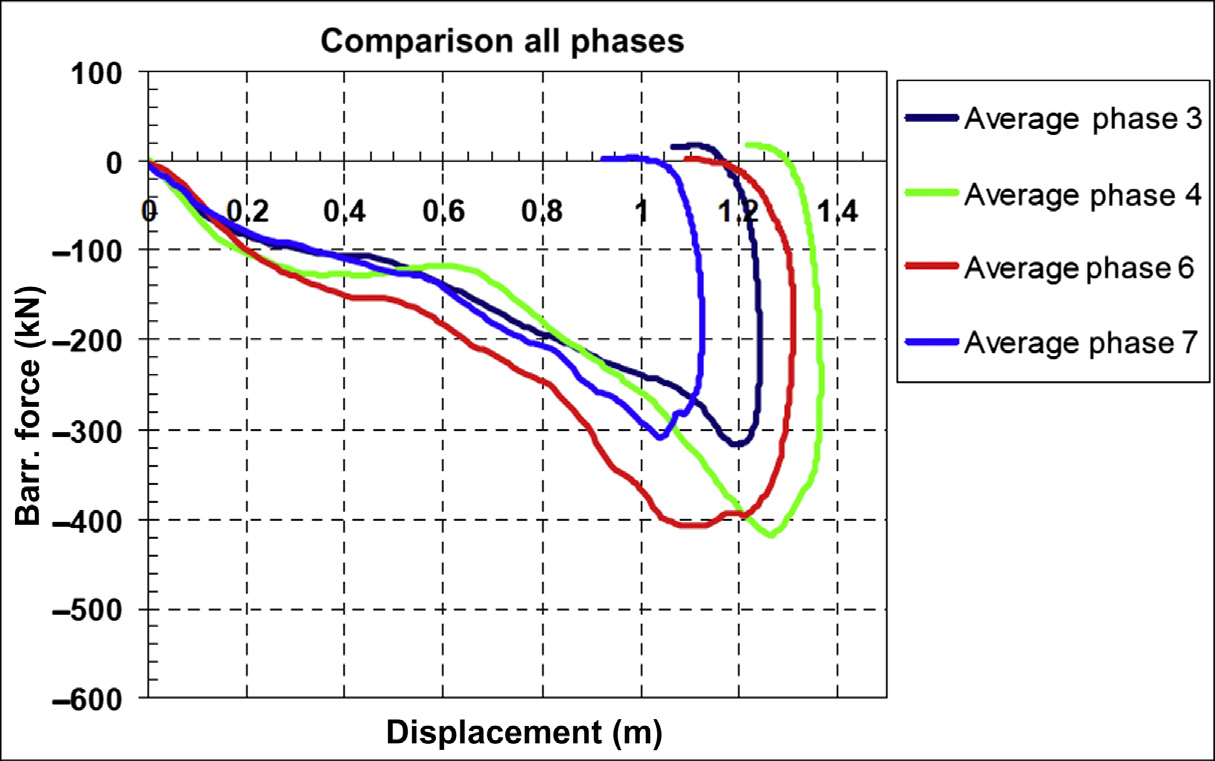
位移是通过对加速度进行双重积分得到的,因此也包含了障碍物的压溃。图1.21 显示了部分大型轿车/行政级轿车车型的 F(x) 曲线,而 图 1.22 显示了每个车辆类别的平均 F(x) 曲线。所有曲线在变形量为0.2至 0.4m之间时,载荷均呈现出几乎平坦的趋势。这一趋势与障碍物有关,当变形超过一定值后,障碍物表现得像一种理想塑性材料。在0.4 m 之后,障碍物达到其最大变形,由于车辆的刚度,力迅速上升。
1.5.2 偏置
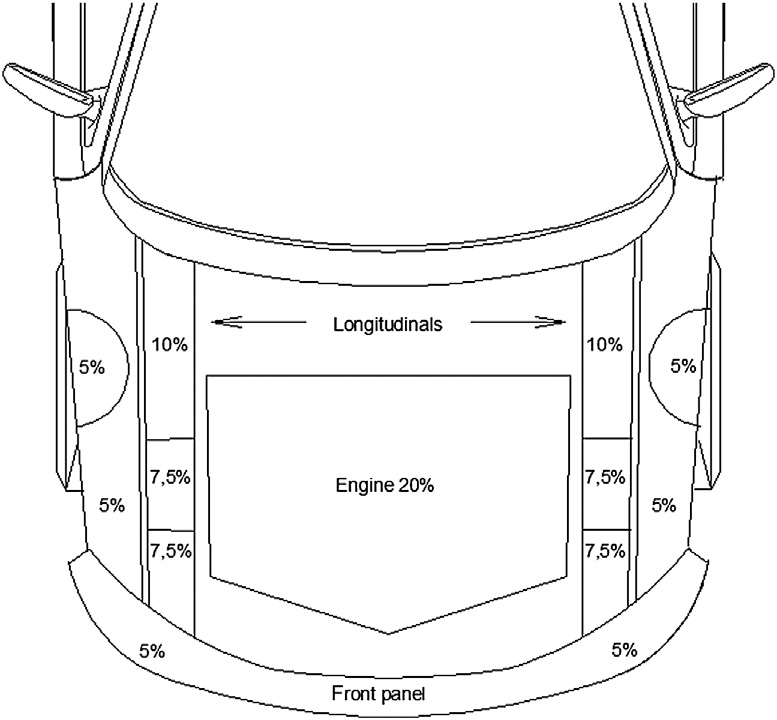
仅涉及前部一部分的碰撞(偏置碰撞)与整个前部参与的碰撞相比,其响应不同,因为各点结构的抗力不同。
重叠百分比决定了汽车前部结构的哪些部分受到撞击并参与能量吸收,参见 表1.1。在与刚性墙发生完全重叠碰撞时,两根刚性的纵梁和发动机的运动可以吸收大部分能量。在碰撞持续时间的前半段,主要由纵梁承受载荷;在后半段,发动机也承受载荷。
与刚性柱的碰撞可视为对刚性墙的小重叠碰撞。仅有一个刚性部件受到撞击,例如纵梁或发动机之一。
偏置实体对低速和高速情况下的变形有不同的影响。图1.23和图1.24显示了数值分别对100%和40%偏置的低速和高速碰撞进行仿真。可以看出,在低速度时,发生塑性流动的主要结构是保险杠;而在较高速度下,纵梁、发动机和防火墙等其他结构也受到影响。
| 正面重叠 百分比 | 结构中的刚性部件 |
|---|---|
| 70–100 | 2 纵梁 + 环绕结构 + 发动机/防火墙 |
| 40–70 | 1 纵梁 + 环绕结构 + 发动机/防火墙 |
| 30–40 | 1 纵梁 + 环绕结构 |
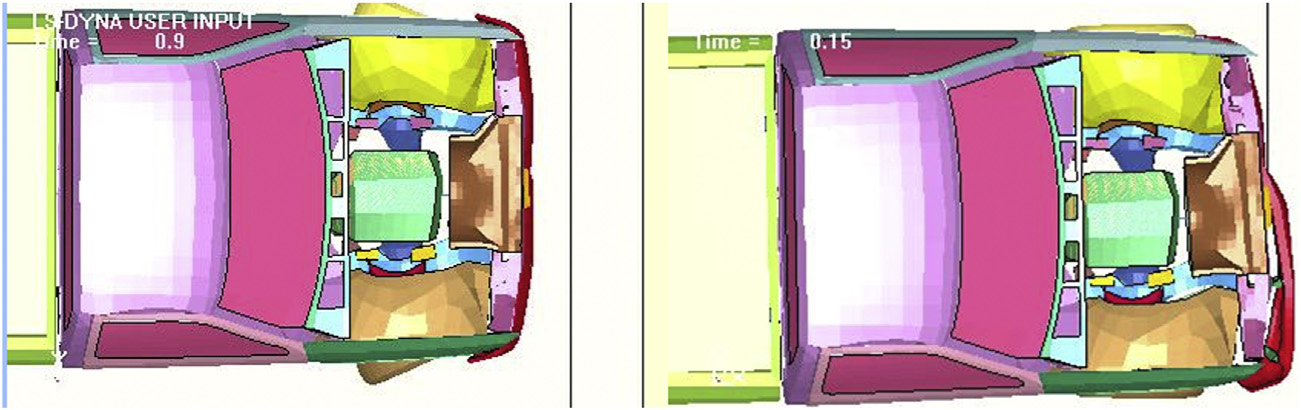
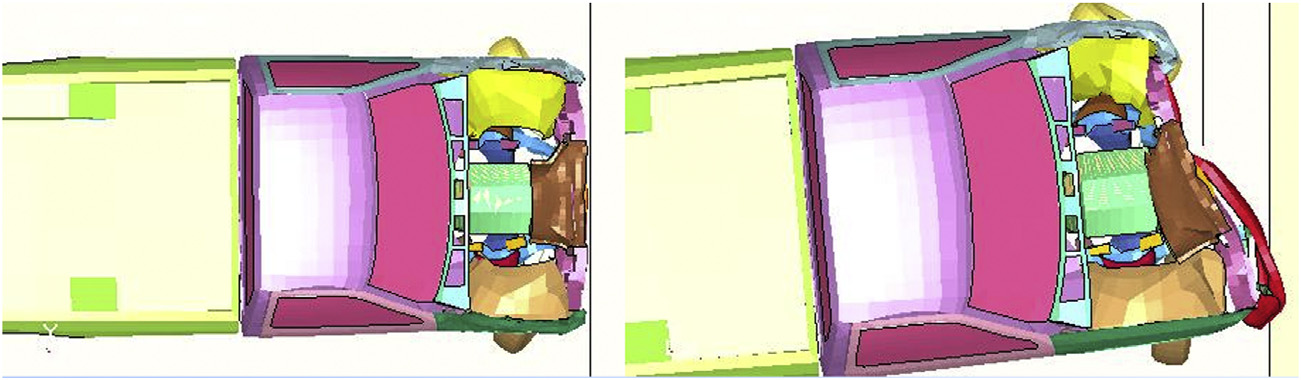
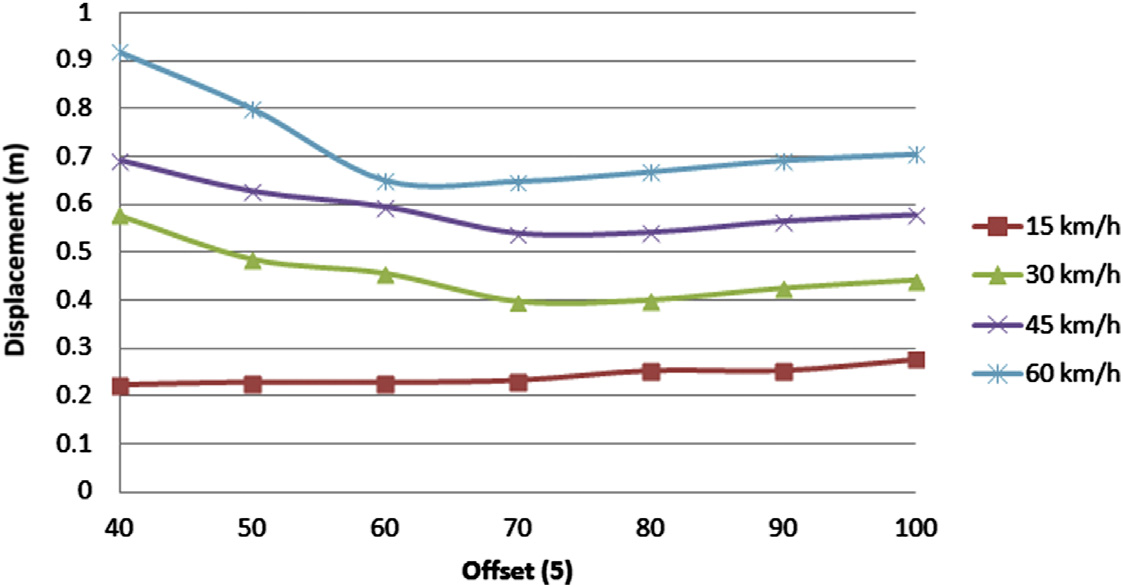
图1.25 显示了同一车辆在不同碰撞速度下,最大变形随偏置变化的行为,该车辆与图1.23和图1.24中的车辆相同。可以观察到,在低碰撞速度下,偏置越大,变形越显著,因为此时保险杠中部发生较大的弯曲。当速度达到使保险杠后方结构参与变形时,低偏置碰撞会产生更大的变形,这对车辆的耐撞性构成了重大挑战。
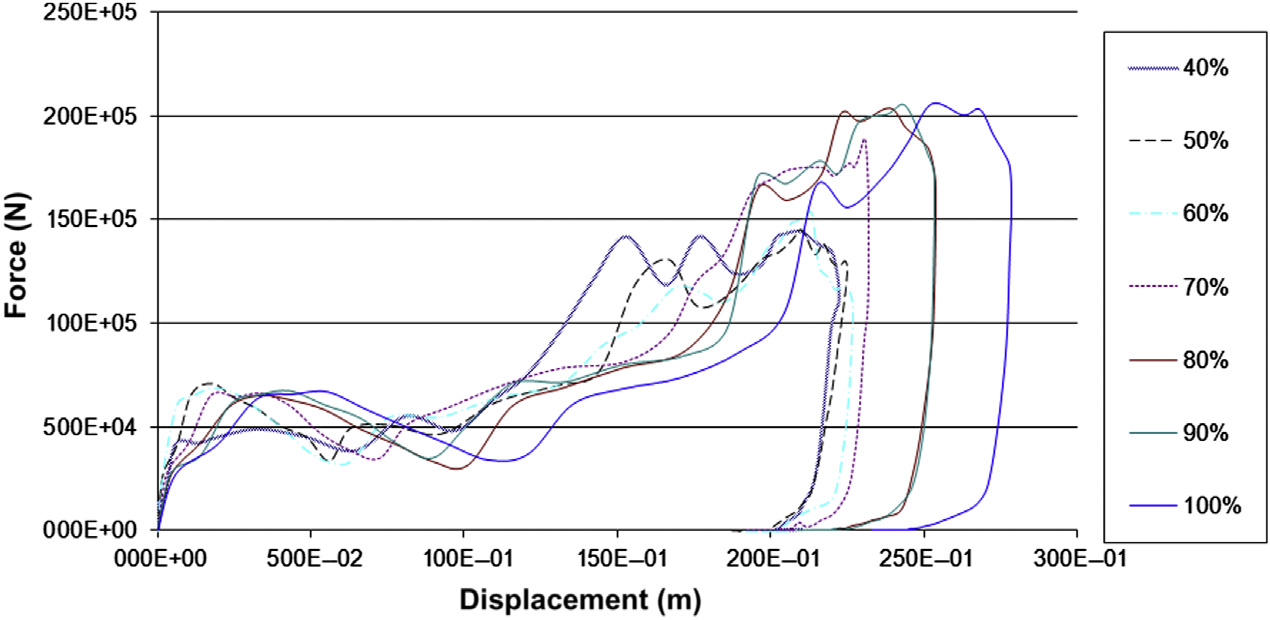
图1.26 显示了同一车辆型号在对刚性壁障15km/h的碰撞速度下,不同偏置水平测得的 F(x) 曲线。可以看出,这些曲线在形状上有所不同,特别是在最大力值和产生的变形方面。
在前后40%重叠碰撞中,从结构角度而言,车辆具有显著的对称性,变形影响到前部或后部近一半区域。在这种情况下,作为初步近似,可以假设对于每个变形值,其受力等于全重叠碰撞中所获得的力的相应比例。
$$
F_{100\%} = \frac{F_{40\%}}{0.4} \quad (1.12)
$$
碰撞速度越高,变形越大,近似效果越好。
1.5.3 斜碰撞
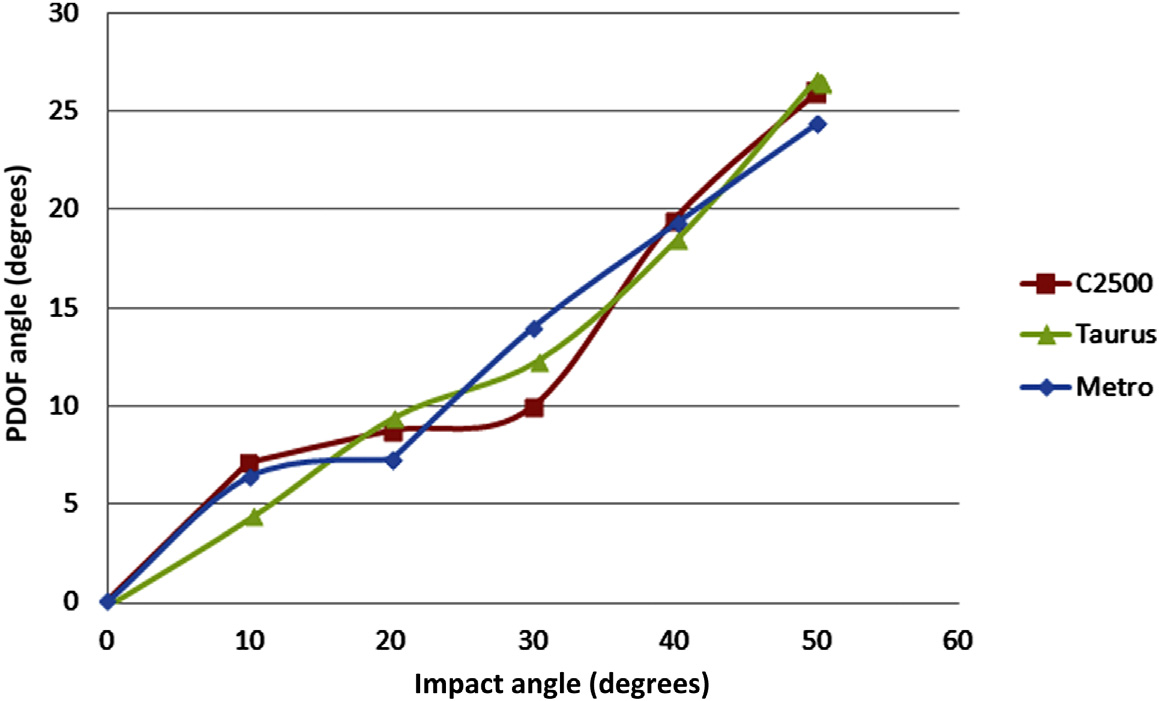
如图1.27所示,当车辆撞击障碍物的角度发生变化时,力的方向也随之变化,相关结构的受力情况也不同。图1.28显示了三种车辆模型在不同撞击角度下,通过数值模拟得到的碰撞合力方向(主力方向—PDOF)的变化情况。可以看出,PDOF总体上呈线性趋势,且始终小于障碍物的倾斜角度,这是因为除了法向力外,还存在平行于表面的摩擦力。

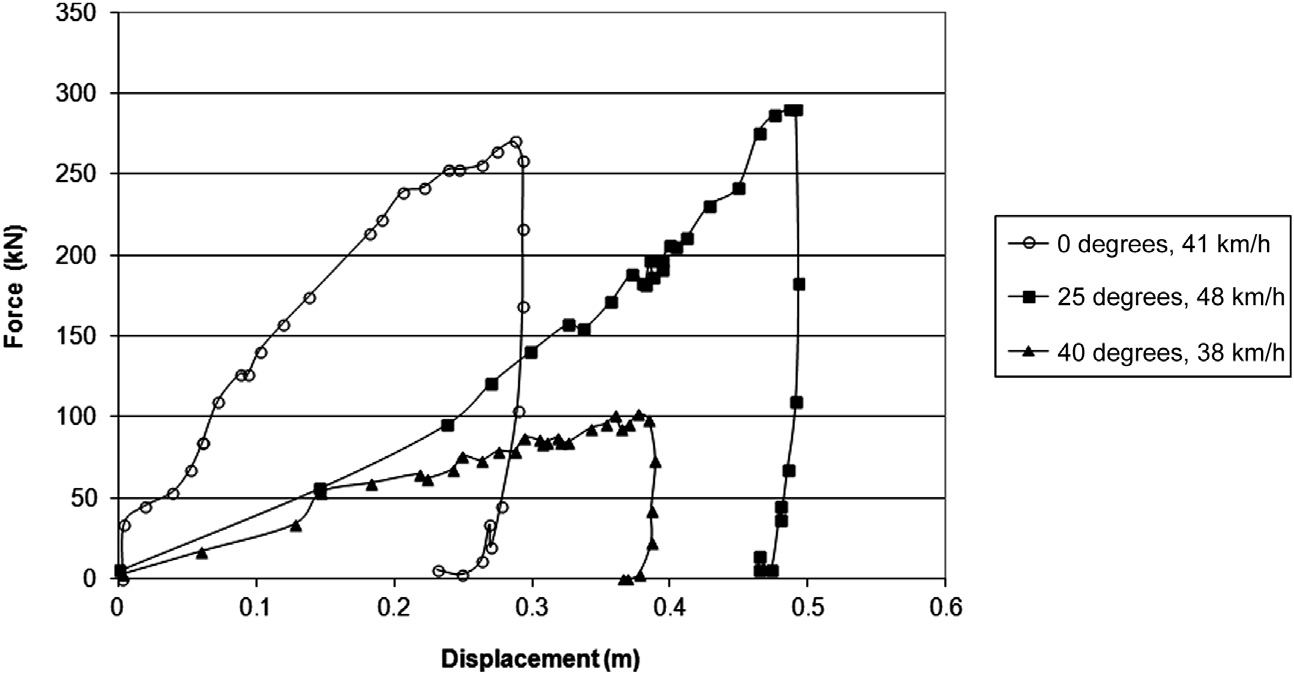
与障碍物不同角度的碰撞具有不同的F(x) 曲线,如图1.29所示。
1.5.4 钻入/骑跨
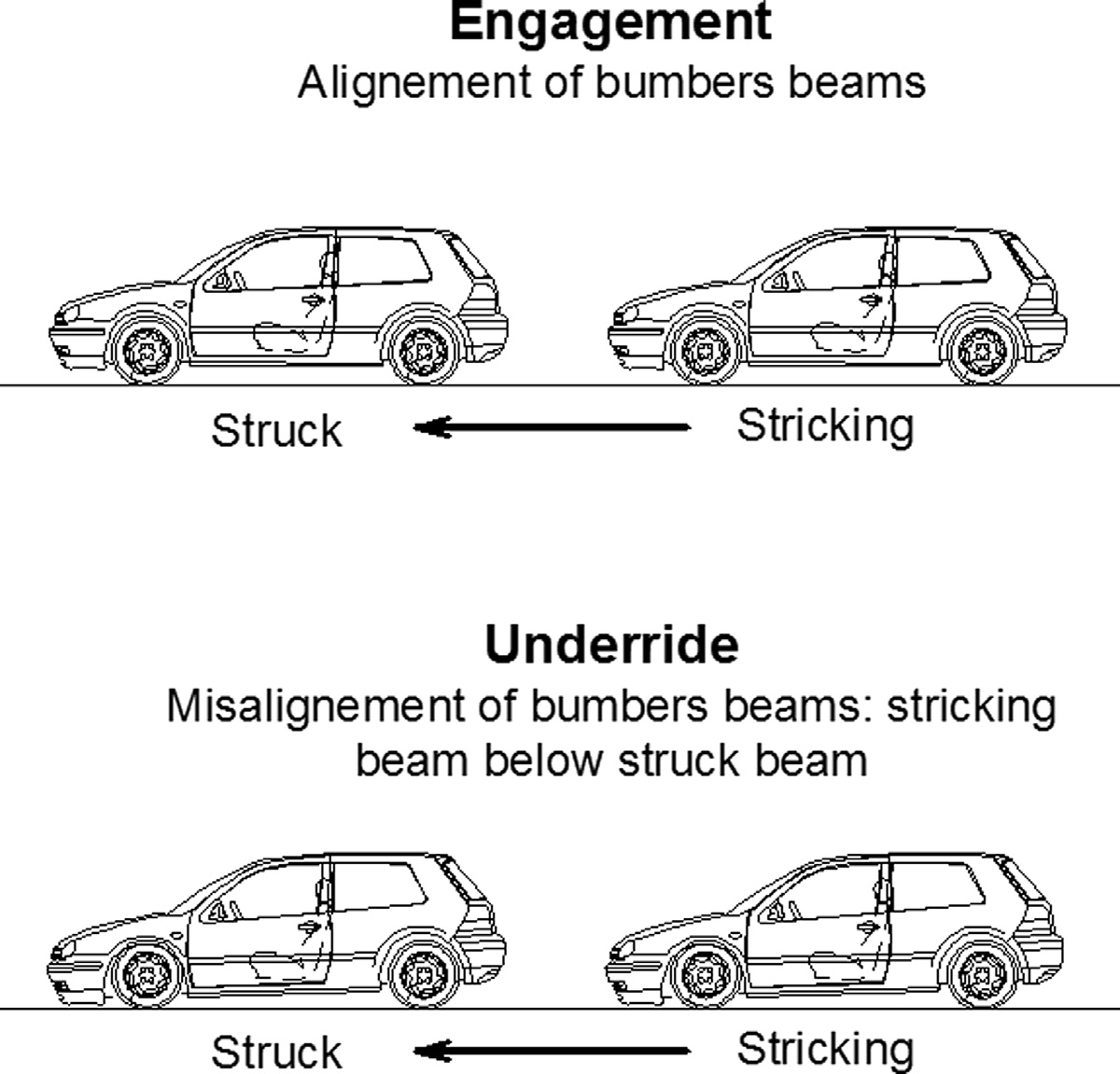
在不同类型的汽车碰撞中,例如SUV与轿车碰撞或皮卡与轿车碰撞,保险杠可能发生严重的错位(钻入或骑上)。在这种情况下,保险杠高度相差数百毫米很常见,因此参与碰撞的结构仅为保险杠上方或下方的部分,而不是整个前部。
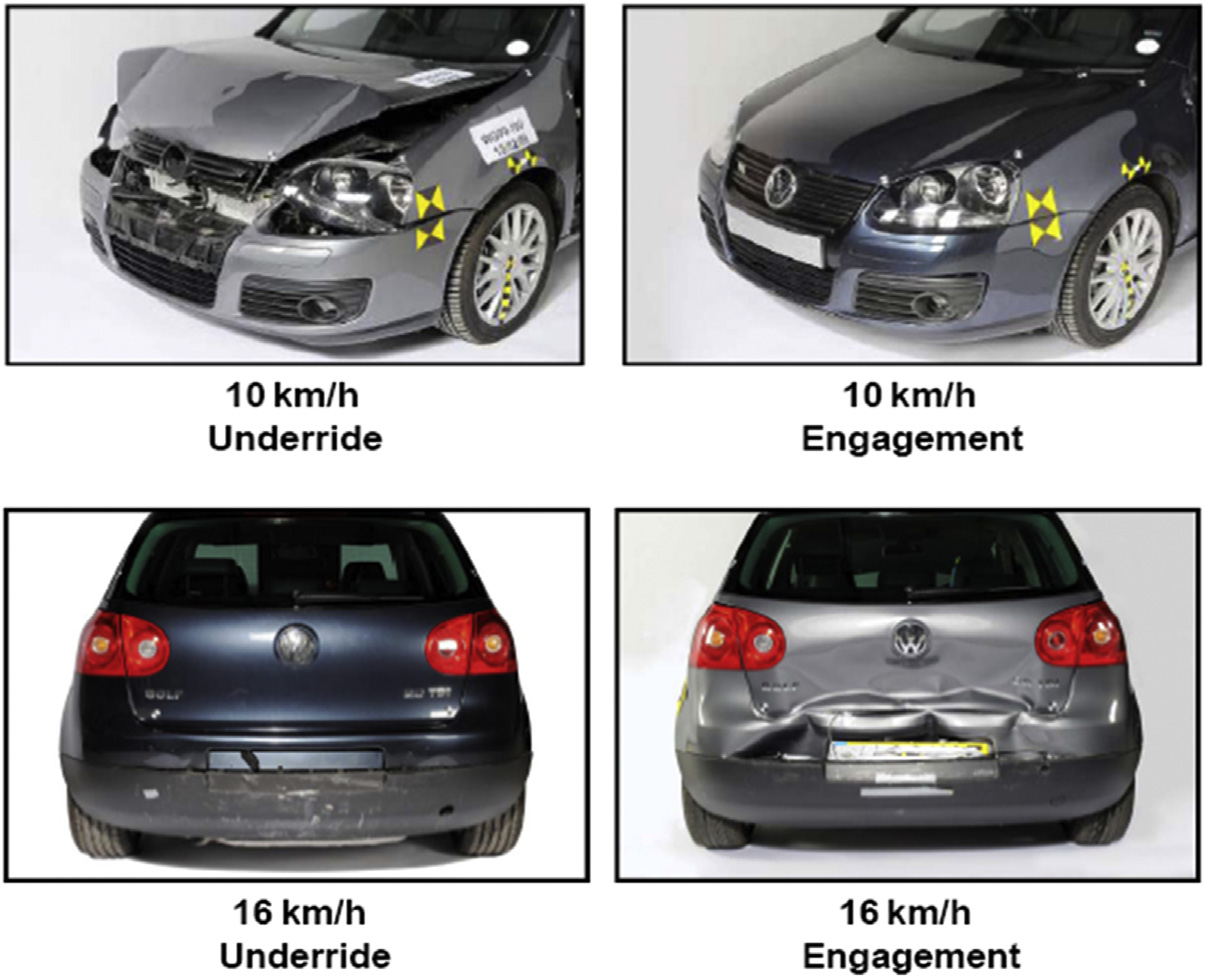
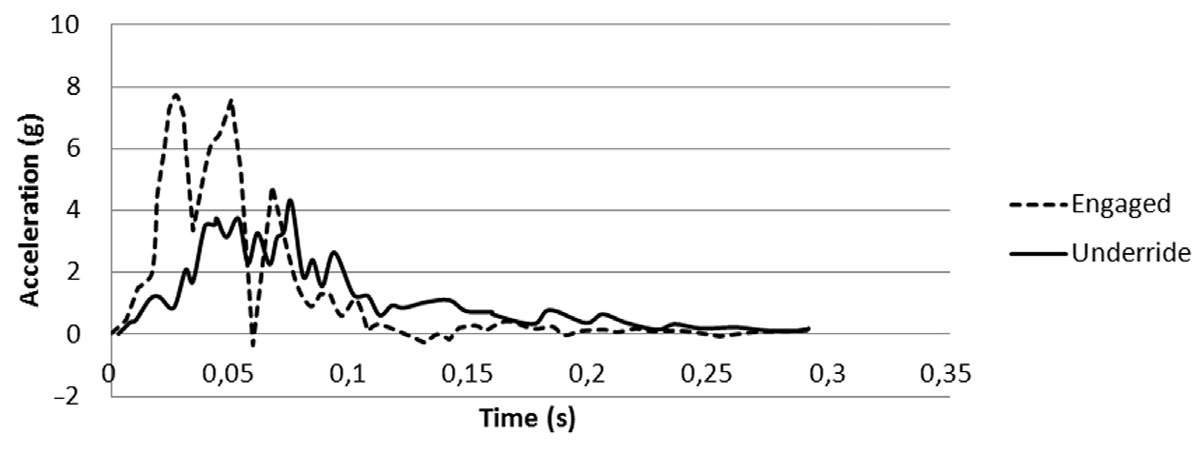
在追尾碰撞中也会发生这种情况,例如当车辆制动时,请参见图1.30。在这种情况下,嵌入碰撞和钻入碰撞的受损区域和加速度曲线不同,如图1.31和 图1.32所示。
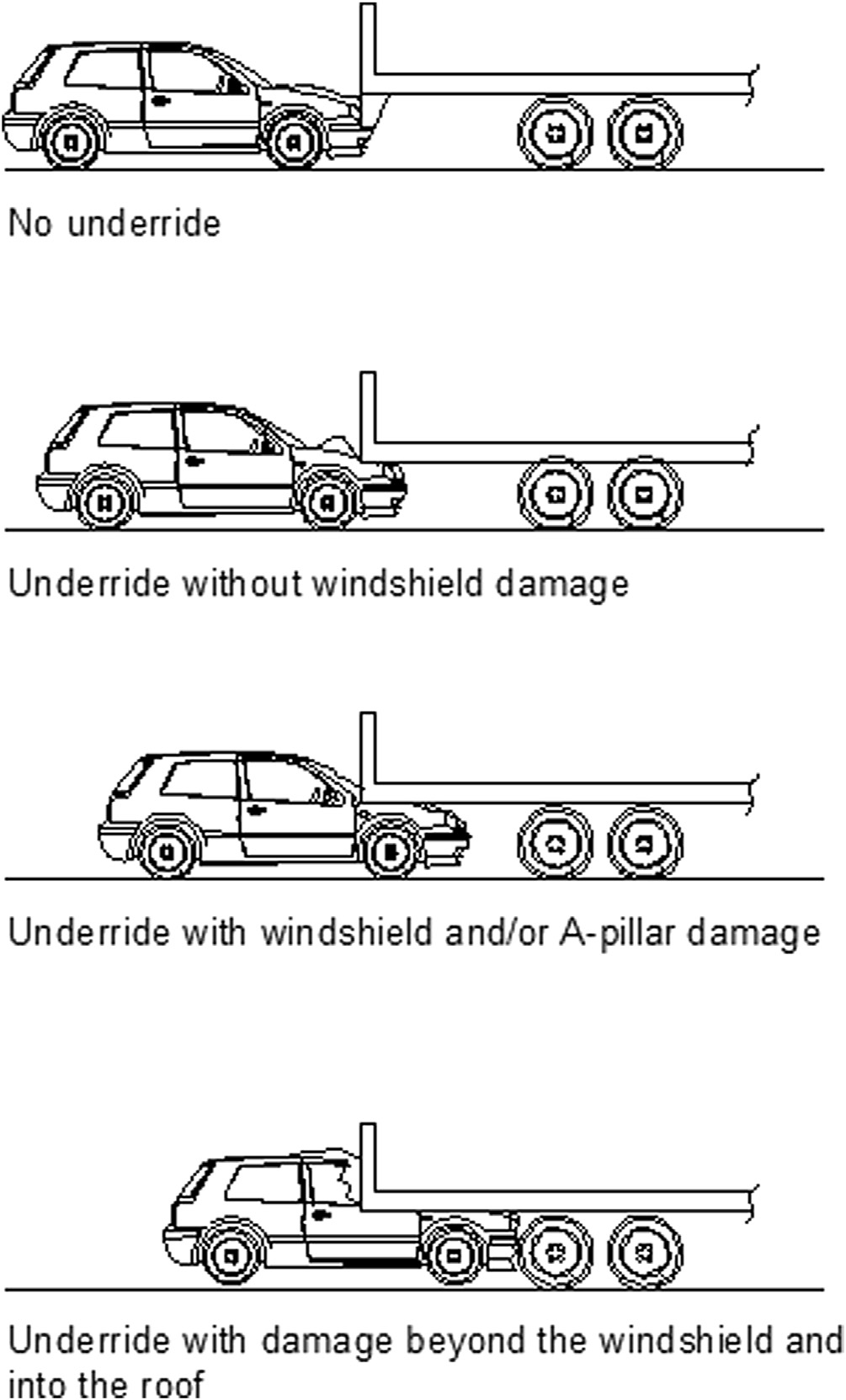
其他钻入情况是,当乘用车与未配备有效防护装置的卡车、挂车或公交车的后部或侧面发生碰撞时。在这种情况下,车辆会继续行驶到大型车辆较高的底盘下方,如图1.33所示。
在发生钻入/骑跨的情况下,即使永久变形较小,由于板件之间滑动摩擦的作用,接触过程中也会造成较大的动能损失。这一现象在低速碰撞中更为明显,此时摩擦现象在整个动能损失中所占的相对权重更高。
在发生钻入/骑跨的情况下,力/变形曲线与标准碰撞测试中获得的曲线无法比较。
1.5.5 碰撞速度
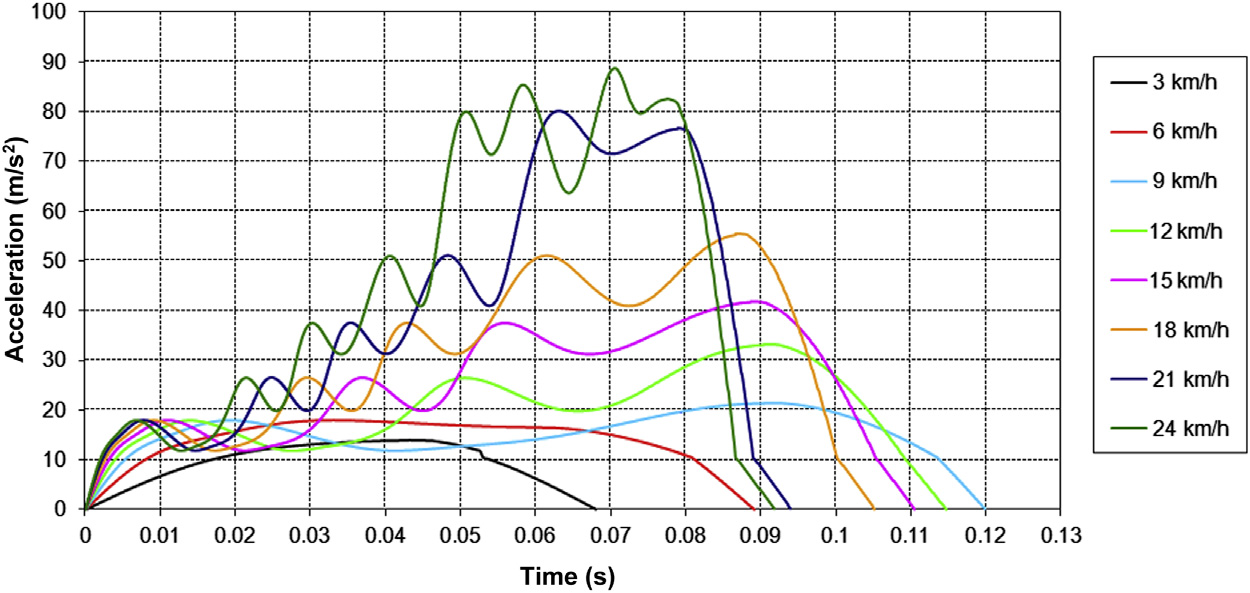
在车辆碰撞发生的典型速度范围内,F(x)曲线几乎与变形速度无关,即从 dx/dt。这意味着在压缩阶段,随着变形的增加,力的变化趋势在一定程度上始终相同。例如,根据不同碰撞速度下测得的车辆加速度曲线(如 图1.34 所示),得到的 F(x) 曲线具有几乎相似的趋势;显然,碰撞速度越高,达到的最大变形也越大。所发现的差异主要取决于以下因素:
- 由于弹性波在结构内部传播,加速度计记录到不同的振动,而数据预处理中未消除该影响。
- 碰撞由弹性失稳现象和结构屈曲主导,可能因撞击配置的微小差异而导致每次试验之间的行为不可重复。
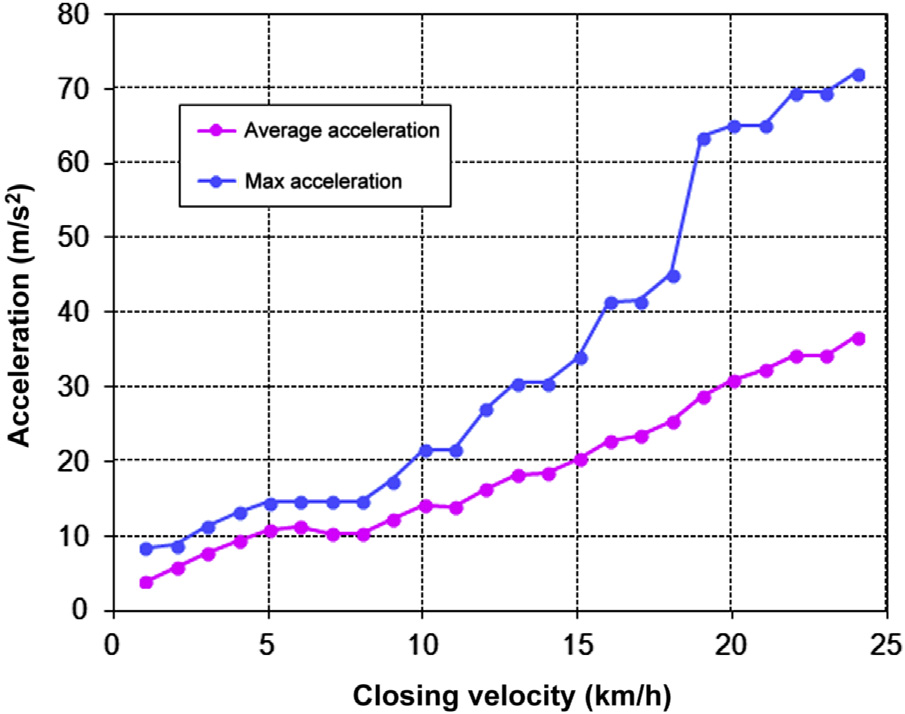
在宏观层面,即车辆在碰撞下的整体响应,平均加速度可能随着碰撞速度的增加呈现非单调行为,如图1.35所示。当超过某些阈值时,部分结构会发生屈服,导致碰撞时间延长,从而降低平均加速度。


















 93
93

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










