




 本文介绍了如何使用里程计数据对激光雷达点云进行运动畸变校正。通过理解不同坐标系的关系,特别是由于运动产生的畸变,采用传感器辅助方法,利用线性插值计算补偿矩阵。代码中展示了将IMU数据转换为激光雷达坐标系,然后通过球面线性插值计算每个点的补偿变换矩阵,最终实现点云的运动补偿。
本文介绍了如何使用里程计数据对激光雷达点云进行运动畸变校正。通过理解不同坐标系的关系,特别是由于运动产生的畸变,采用传感器辅助方法,利用线性插值计算补偿矩阵。代码中展示了将IMU数据转换为激光雷达坐标系,然后通过球面线性插值计算每个点的补偿变换矩阵,最终实现点云的运动补偿。
激光点云的畸变校正
0.引言
校正由于运动引起的激光点云畸变。
点云去畸变的方法包括:
- 纯估计方法(ICP/VICP)
- 传感器辅助方法(IMU/ODOM)
- 融合的方法
这里学习的也是传感器辅助方法。多余的也不再赘述,自己理一下几个坐标关系并做记录。
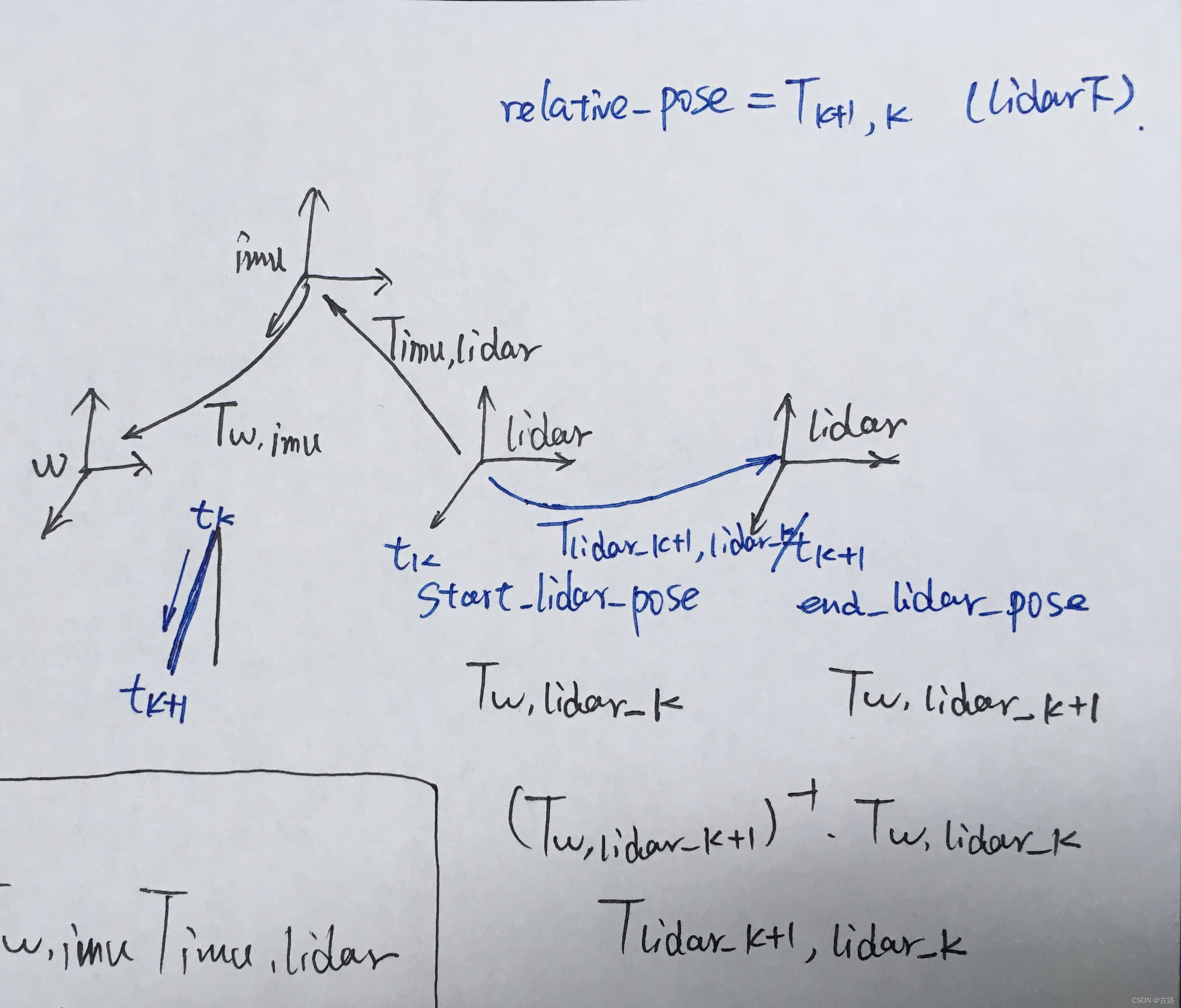
1.理解几个坐标系的关系
畸变产生的原因如图所示,自己理解也是基于这张图进行理解。

这个坐标系关系和后续的代码相对应。
通过线性插值,计算补偿矩阵的原理:
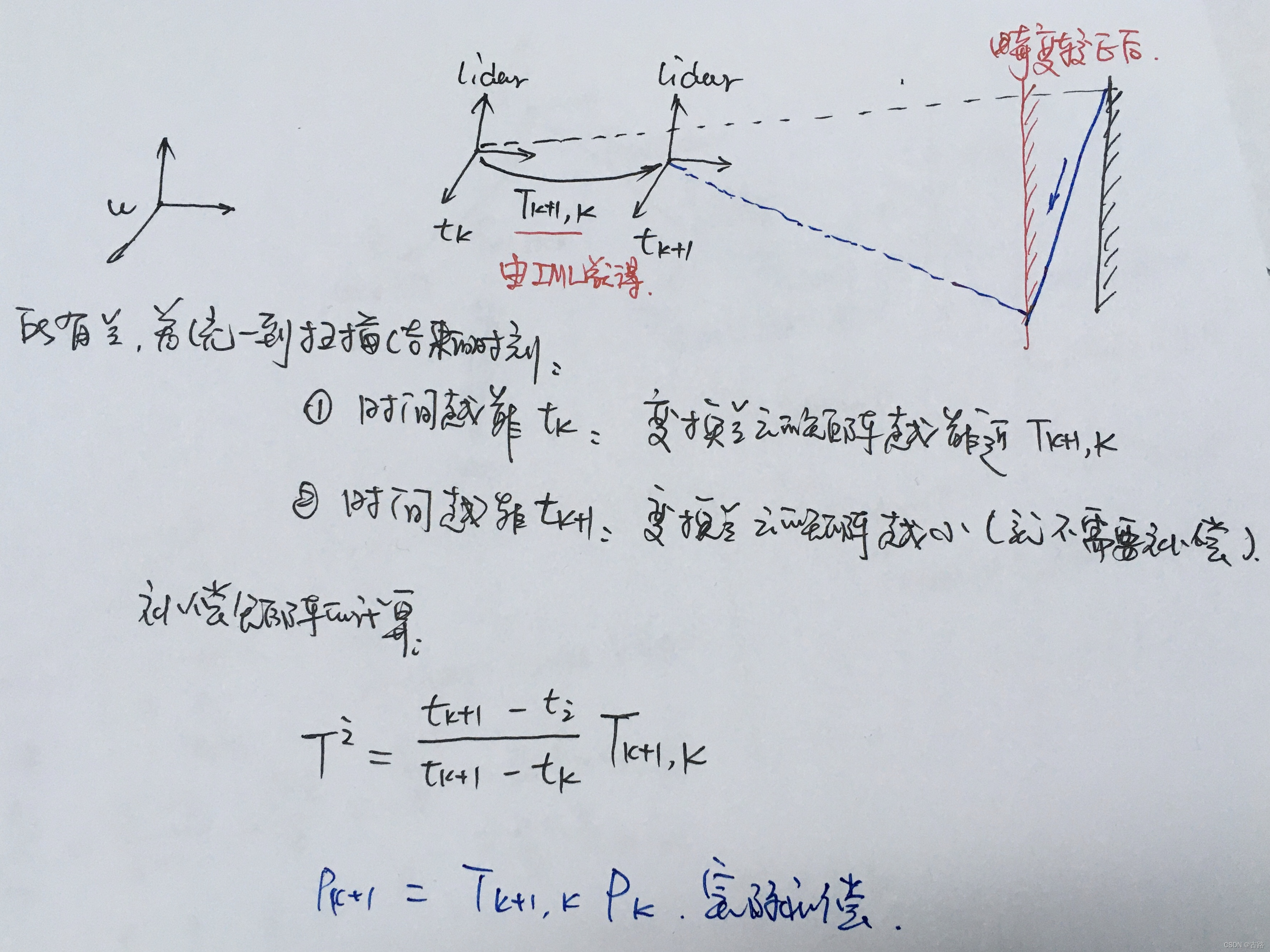
雷达扫描一帧的时间是固定的,通过计算得到每个点的采集时刻,将所有点都统一到同一时刻,**假设选择每完成一帧扫描的结束时刻,**如图所示,直观的理解就是:
- 1.时间越靠近 t k t_k tk ,补偿矩阵越近似于 T k + 1 , k T_{k+1,k} Tk+1,k
- 2.时间越靠近 t k + 1 t_{k+1} tk+1 ,补偿矩阵越接近于单位阵,就是不需要补偿
T i = t k + 1 − t i t k + 1 − t k T k + 1 , k T^{i}=\frac{t_{k+1}-t_{i}}{t_{k+1}-t_{k}} T_{k+1, k} Ti




















 932
932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











{kind=link}