



导读:在自然界中,纤毛广泛存在于呼吸道上皮和海洋微生物表面。虽然尺度仅为微米级,但通过协同、非互易的周期性摆动,纤毛能够高效实现定向输运和流体操控等功能。
如何在人工系统中复现这种运动方式,一直是软体机器人和微流控领域的关键挑战。难点并不在于结构成形,而在于能否在微米尺度下,实现低电压、毫秒级响应、可编程的非互易三维运动,并具备阵列化集成能力。
1月14日,德国斯图加特马克斯·普朗克智能系统研究所Metin Sitti教授联合香港科技大学胡文琪助理教授,利用双光子聚合(TPP)3D打印技术,开发了一种水凝胶微纤毛阵列致动器。
该系统在低至1.5 V的电压下即可实现毫秒级响应,并在微米尺度上实现了可编程的非互易三维运动与复杂流体操控。
相关成果以“3D-printed low-voltage-driven ciliary hydrogel microactuators”发表在《Nature》期刊上。其中中国青年学者Liu Zemin为论文第一作者。
从毫米到微米:纳米孔水凝胶带来的尺度跃迁
传统水凝胶致动器大多工作在毫米尺度,其驱动依赖于pH或渗透压梯度建立,响应时间往往以秒计。而本研究的关键突破,在于尺度的根本性缩小。
研究者通过双光子聚合3D打印,将离子水凝胶内部的孔径从几十微米压缩至纳米尺度。这种高度致密、均匀的网络结构显著提升了材料的有效比表面积,使电双层(EDL)容量大幅增加,从而在电场作用下实现更高效的离子传输与电渗流。
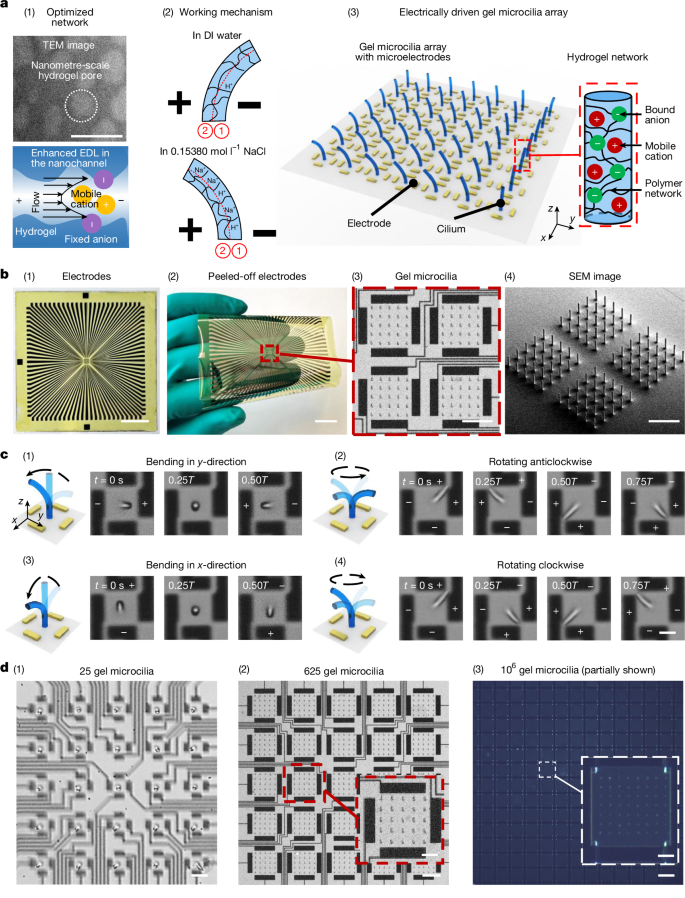
图1:电驱动水凝胶微致动器的制造、机制和装置
最终得到的,是直径2–10 μm、高度18–90 μm的水凝胶微纤毛,并在其周围集成了间距30–300 μm的微电极。在仅1.5 V(低于水电解阈值)的电压下,局部电场强度即可达到5000–50000 V·m⁻¹,为快速、可逆的驱动奠定基础。
离子在“纳米迷宫”中奔跑:毫秒级弯曲的真正原因
当电场施加后,微纤毛几乎“立刻”做出反应。其弯曲速度相比传统水凝胶快了近100倍,根本原因并不在于材料“更软”,而在于离子迁移路径被极度缩短。
更有趣的是,弯曲方向完全由溶液中的主导离子决定。
在H⁺主导的去离子水中,纤毛向阳极弯曲;在Na⁺主导的生理盐水中,纤毛则转而向阴极弯曲;在中等盐浓度下,H⁺与Na⁺的竞争会导致先正向、再反向的瞬态弯曲行为。
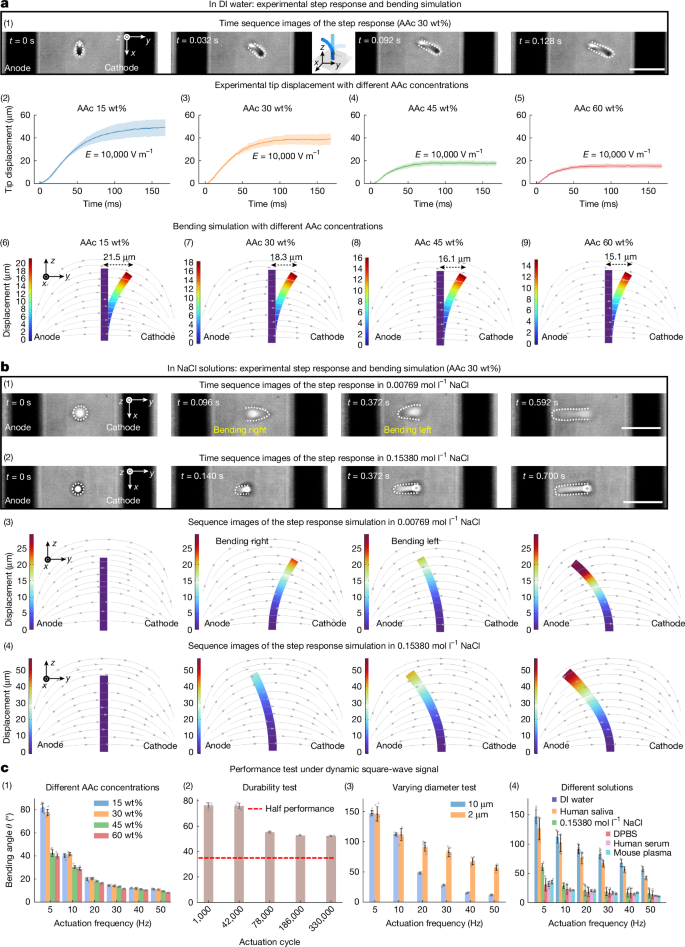
图2:凝胶微纤毛致动器动力学的表征
耦合的电-化学-力学模拟揭示了这一过程的微观图景:H⁺迁移率(μH = 3.62 × 10⁻⁷ m²·s⁻¹·V⁻¹)远高于Na⁺,在电场中更快聚集,引发局部网络收缩;而Na⁺的水合作用则导致网络溶胀。正是这种离子迁移率差异,赋予了系统可预测、可设计的非互易动力学。
在10000 V·m⁻¹的电场下,H⁺穿越10 μm仅需2.8 ms,使得纤毛的旋转弯曲频率可达40 Hz。
非互易不是“随机”:可重编程的微尺度协同运动
单根纤毛的快速弯曲只是开始。真正令人印象深刻的,是该系统在阵列尺度展现出的高度可编程性。
通过对图案化微电极施加不同相位与时序的电信号,研究者实现了多种复杂运动模式,包括同步单向弯曲、180°异相弯曲、顺时针或逆时针旋转,以及相邻纤毛的反向协同运动。
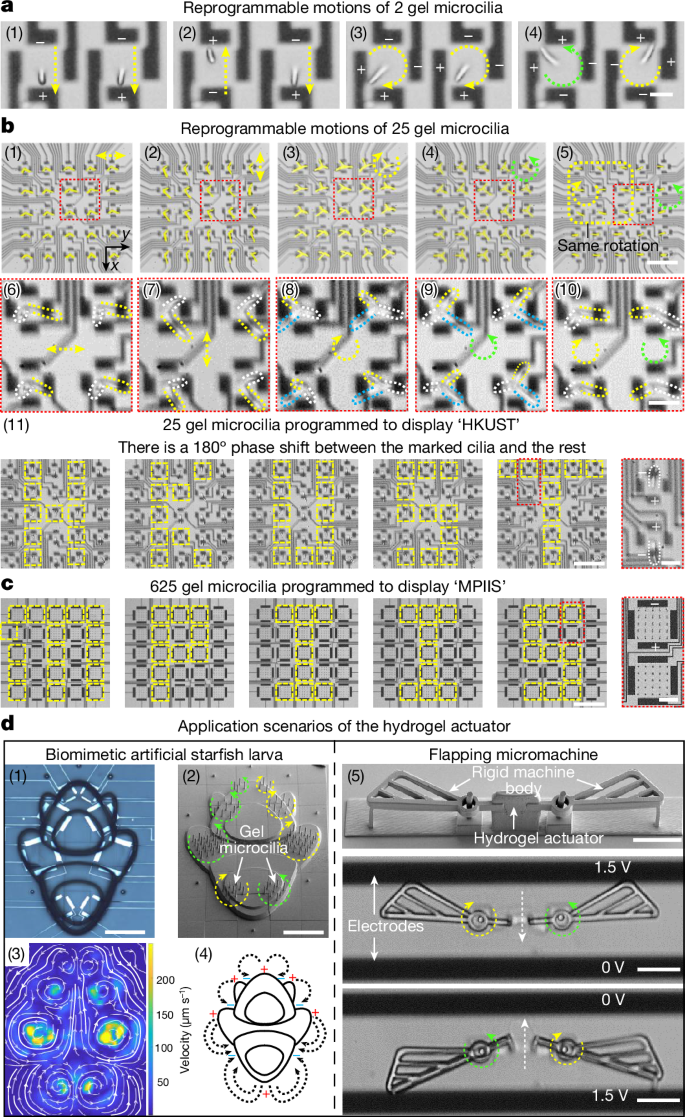
图3:凝胶微纤毛阵列的动态弯曲运动
这些运动可无缝扩展至5×5乃至25×25的阵列,每一个致动单元都可独立寻址。阵列甚至可以被“写成”特定图案,例如通过180°相位差,让纤毛阵列动态显示“HKUST”或“MPIIS”,在微尺度上形成清晰可辨的视觉对比。
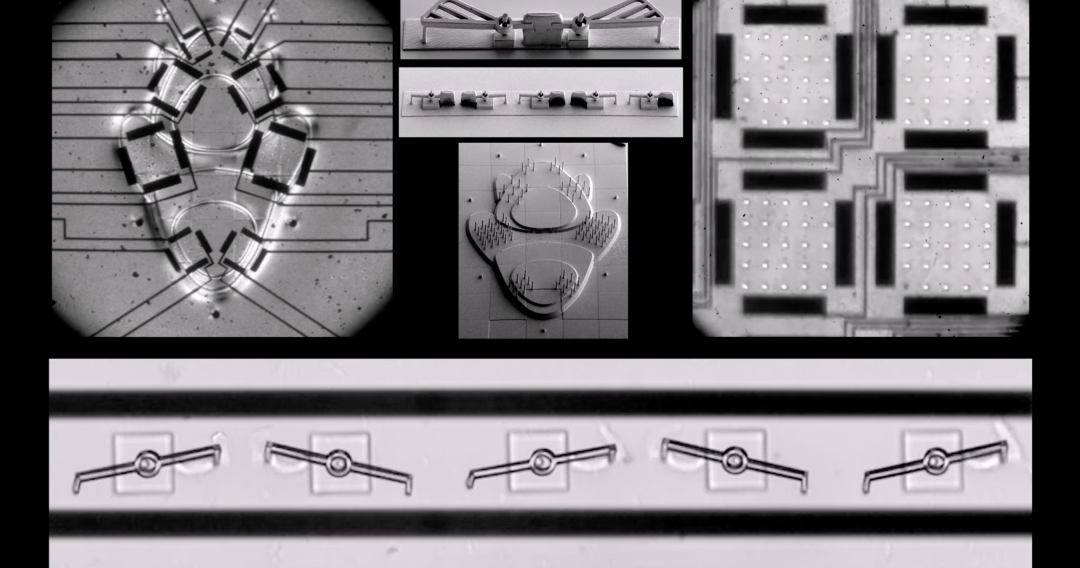
更进一步,水凝胶纤毛还能与3D打印的微机械结构集成,将弯曲转化为旋转、拍动等复杂运动;甚至被用来构建一个“人工海星幼虫”平台,在电控下重现生物体表面纤毛驱动的涡流阵列。
不只是动:微纤毛驱动的可编程流体
研究者展示了两种流体操控策略:一是结构编码,在相同驱动信号下,仅通过改变纤毛的位置与密度,就能生成完全不同的涡流拓扑;二是时间编码,通过独立寻址、相位差驱动,动态重编程流场结构。
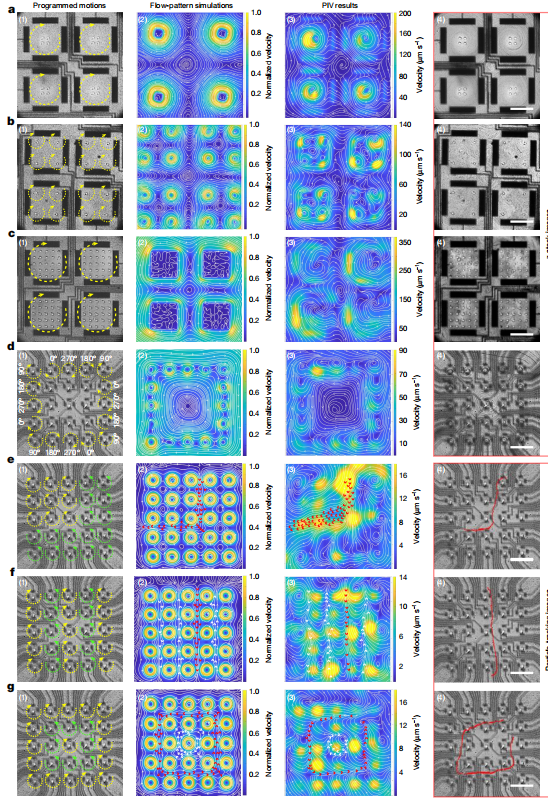
图4:凝胶微纤毛阵列对流体的动态操控
由此产生的流动模式包括嵌套涡流、L形流动、双向垂直流等,粒子图像测速(PIV)结果与理论预测高度一致。估算的最大流速达到50–250 μm·s⁻¹,展示了其在微流控输运与颗粒操控中的实际潜力。
小结与展望
这项工作展示了一条极具启发性的路径:通过3D打印、离子水凝胶与低电压电场,在微米尺度上实现高频、非互易、可编程运动。
它不依赖复杂的机械传动,也不需要高能耗刺激,却在运动自由度与系统集成度上,逼近了生物纤毛的工作方式。随着材料组成、电极结构和尺度的进一步优化,这类电控水凝胶微纤毛有望在微型机器人、生物医学器件与智能微流控系统等领域发挥更大作用。


















 87
87

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










