



教育机器人促进和评估学生小组中的社会关系
摘要
近年来,机器人技术在正式、非正式和非正规的教育过程中发挥了重要作用,主要涉及科学、技术、工程和数学(STEM)相关学科,主要在与STEM(科学、技术、工程和数学)。事实上,教育机器人(ER)也可以有效地应用于软技能培养,因为当以小组活动的形式开展时,它有助于促进学生之间的社会联系。通过小组合作解决机器人领域中的问题或完成任务,能够促进新的关系发展,并突破学校环境中既有联系所造成的限制。与此同时,教育机器人(ER)提供了一个可以通过社会测量工具来评估群体动力学的环境。本文将描述一个如何利用教育机器人来促进和评估学生小组中社会关系的实例。特别是,我们报告了一项对比研究:1)使用机器人的实验室;2)使用Scratch进行编程的实验室;以及3)对照组。该研究涉及正在就读中学的意大利学生。
由于本实验的重点是研究学生小组中的关系,我们使用了莫雷诺提出的社会测量工具。结果表明,在机器人实验室中让学生参与其中,能够有效促进学生之间的关系,并且结合社会测量工具,可以以一种综合且易于管理的方式描绘群体动力学。
1 引言
在过去的几十年中,各种活动已在28所学校中与课程内活动并存。其中,教育机器人(ER)可以成为一种有效的教学工具(米贾诺等人,1999年),因为它有助于传授数学、计算机科学、物理(林德和霍尔格松,2007年;威廉姆斯等人,2007年;努根特等人,2009年)等知识,并培养思维技能和问题解决方法等方面的能力(阿特马齐多和德梅特里亚迪斯,2016年;侯赛因等人,2006年;米克罗普洛斯和贝卢,2013年;沙利文,2008年;加布里埃莱等人,2017年)。
贝尼蒂在2012年发表的一篇有趣综述指出,学校使用机器人对教授与STEAM领域(STEM加上艺术)相关的概念具有积极影响,因为它可以在从学前教育到包括大学在内的高等教育整个教育过程中,对科学、技术和数学领域的教育产生影响(阿里米西斯,2013年;江口,2014a;钟等人,2014年;贾维迪和谢巴尼,2010年)。
多年来,教育机器人已广泛引入学校活动中,并巩固了其存在,尤其是在高中教室中。教育机器人(ER)意味着一种综合方法,用于补充不同领域和学科,增强对科学问题的兴趣和好奇心(阿里斯和奥尔科斯,2019)。
对于当今社会,掌握技术至关重要,而教育机器人可用于引入技术并促进其他技能的发展。事实上,在与STEAM相关议题并行的同时,教育机器人还能促进主动性、自主性、团队合作和创造力(Sica等,2019a)等所谓21世纪技能(Eguchi,2014b)、复杂与进化系统管理(Miglino等,2004;Whittier和Robinson,2007;Rubinacci等,2017a),以及社交技能和沟通能力(Owens等,2008)。
坎德霍费尔和施泰因鲍尔(2016)的一项相关研究表明,教育机器人有助于取得更好的成果,学生的社交技能和自尊得到提升,从而增强了学习动机(Bazylev等,2014),而动机是促进学习的关键因素。从教育科学的角度来看,教育机器人基于建构主义方法,学生处于学习挑战的中心地位,因为他们是能够主导自身学习过程的主动参与者(Papert,1980;Papert和Harel,1991;Piaget,1974)。这意味着,在机器人教育活动中,学习者自主构建理解周围世界的方式,他们进行探索,创造性地运用信息获取更多知识,并在教师指导下积极参与各项教育挑战(Sica等,2019b)。
从个体层面转向小组层面,值得注意的是,大多数机器人教育活动必须以小组形式开展,从而促进协作工作和协作学习(Denis和Hubert,2001)。关于教育机器人中的协作学习已有一定数量的研究,表明其有助于促进不同年龄段学生小组内部的社会联系。Gonnot及其同事(2019)最近的一项研究分析了在协作学习情境中使用社交机器人的情况,探讨为机器人增加社交维度如何改善学习效果。还有一些研究致力于探究社交机器人是否会影响儿童游戏过程中的协作行为(Strohkorb等,2016),并提出了将机器人作为中介工具的框架(Mitnik等,2008)。如果将机器人视为物联网的组成部分(Plauska & Damaševičius,2014),它们便可成为协作学习教育框架的核心元素;并且凭借其促进协作学习的特性,可以采用如前所述的建构主义方法进行教学,这种方法对儿童和青少年具有高度的激励作用。Atmatzidou和Demetriadis(2012年)的研究进一步深化了关于学校环境中教育机器人教学法的思考,这是一个影响重大的议题。他们探讨了在机器人教育活动中用作学生小组作业指导的不同协作脚本。
2 机器人技术与群体动力学
总结文献所述,教育机器人可用于促进与STEAM相关的知识以及计算思维、问题解决、复杂系统管理和协作学习等技能的发展,这些都属于“学生内部”的范畴,即侧重于个人层面。
在本研究中,我们建议将关注点转向参与机器人教育活动的学生之间的互动,即我们重点关注其社会层面。我们认为,教育机器人可用于促进学生之间的积极协作关系,同时为评估教室中变化的网络提供一个情境(Rubinacci等,2017b;特鲁利奥等,2018a)。特别是本文作者提出的这些近期研究,指出了如何利用教育机器人来促进学生之间的积极联系与互动。
现在,我们进一步验证这一主张,并表明在教育机器人背景下使用社会测量工具可以描绘出影响学生学业生涯和课堂氛围的关键时期中的课堂环境(特鲁利奥等,2018b)。学校中低社会融入会对辍学等重要现象产生严重影响(里卡尔和佩莱捷耶,2016;Frostad等,2015),而社会测量框架提供了敏感的工具,用于观察机器人教育活动引发的微观与宏观动态。
这种情况的发生是因为教育机器人能够在学生之间建立一座桥梁,使他们变得相互依赖,因为他们需要达成一个共同目标(布尔拜特等,2013;康加等,2016),彼此协调,学会将任务分解为子任务并完成这些任务,同时考虑小组其他成员的意见、想法、技能和能力。因此,即使是那些在班级中融入程度不高的学生,也有机会参与小组活动,并改善与其他学生的关系。
在本文中,我们旨在展示教育机器人确实是一个恰当且有用的框架,可用于评估学生同伴小组中的社会关系,并支持学生之间的积极联系。特别是,我们的研究假设是,与其他活动相比,教育机器人在促进学生之间积极联系与互动方面可能更为有效。同时,我们的目标是验证社会测量工具的使用是否为评估这些关系提供了一个有效的框架。为解决这些问题,我们开展了一项为期两个月的项目(从2017年9月到11月)。该试验在意大利南部的那不勒斯及其周边地区进行,该地区受辍学问题影响严重,导致社会层面的诸多威胁(O’Higgins等,2007)。在第3节中,我们将更详细地描述该项目以及所获得的结果;在第4节中,我们将讨论这些结果及其意义。
3 机器人技术促进和评估学生小组中的社会关系
本节描述了我们在意大利一所中学开展的研究。该研究项目旨在评估教育机器人实验室是否能够通过小组活动有效评估并促进班级同龄群体内部的社会关系。为了验证我们的研究假设,我们考虑了三个小组和两种活动:教育机器人实验室和使用Scratch的编程实验室。第三个小组进行个人活动,这类活动无意激发学生之间的互动。因此,可以描绘出学年开始时各小组的动态情况以及不同活动对它们的影响。
3.1 材料与方法
3.1.1 参与者
该研究涉及70名中学(“Scuole medie”)一年级在读参与者,意大利学校系统),年龄在10至11岁之间。38名参与者为女性,32名为男性;他们的平均年龄为10.48岁。
我们决定将重点放在一年级学生上,因为他们在学年初相互之间的联系较弱。
根据学校需求,每个小组被随机分配到实验设计的一个条件下。从与学校负责人讨论后,我们确认班级的组成是在小学成绩、性别平衡和社交技能方面具有同质性。
更详细地说:
- 由23名学生组成的第1组,开展了教育机器人实验室活动;
- 由24名学生组成的第2组,进行了使用Scratch的编程实验室活动;
- 由23名学生组成的第3组,未参与任何小组活动。
第3组为对照组,可用于获取基线数据,以便比较小组活动在对社会关系的影响方面的效果,因为小组活动开始与结束之间的时间间隔仍然会对同龄人之间的联系和关系产生影响。
3.1.2 小组活动工具:乐高头脑风暴NXT和Scratch
本项目中使用的机器人技术是乐高头脑风暴NXT(克拉斯纳和安德森,2003)。该机器人套件包含硬件和软件两部分(NXT‐G)。
在编程实验室中,我们使用了Scratch(Maloney等,2010):这是一种可免费获取的编程语言,常用于引导儿童、少年学生接触编程,因为它提供了通过图像、音乐和声音简单直观地创建多媒体和互动游戏的机会。除了与计算思维相关的编程外,该软件还有助于学生发展创造力、系统化推理和问题解决方面的技能。
3.1.3 社会测量测试
为了评估社会关系,在实验活动前后对三个小组的学生进行了莫雷诺的社会测量测试。社会测量测试能够有效调查同龄群体内部的人际关系,并突出小组成员在包容性方面的地位。事实上,社会测量学是由雅各布·L·莫雷诺提出的一种方法论,用于研究群体内个体的结构与互动(莫雷诺,1941年;1951年),该方法已被应用于包括家庭治疗和教育情境在内的多种不同领域。在教育情境中,社会测量法可用于考察学生之间存在冲突、孤立个体、工作小组缺乏合作等情况。在本项目中,该方法被选为描绘和研究参与活动的三个小组中同龄人之间联系的工具。
向学生提出的社会测量测试涉及被称为情感‐关系视角的标准。这一视角与关系的情感层面相关,反映了学生的亲和力。
该标准通过两个句子来具体化,能够突出对小组成员的偏好以及相反的排斥情况。这两个句子要求参与者指出在学校旅行期间他们愿意(或不愿意)与其同住的同班同学。
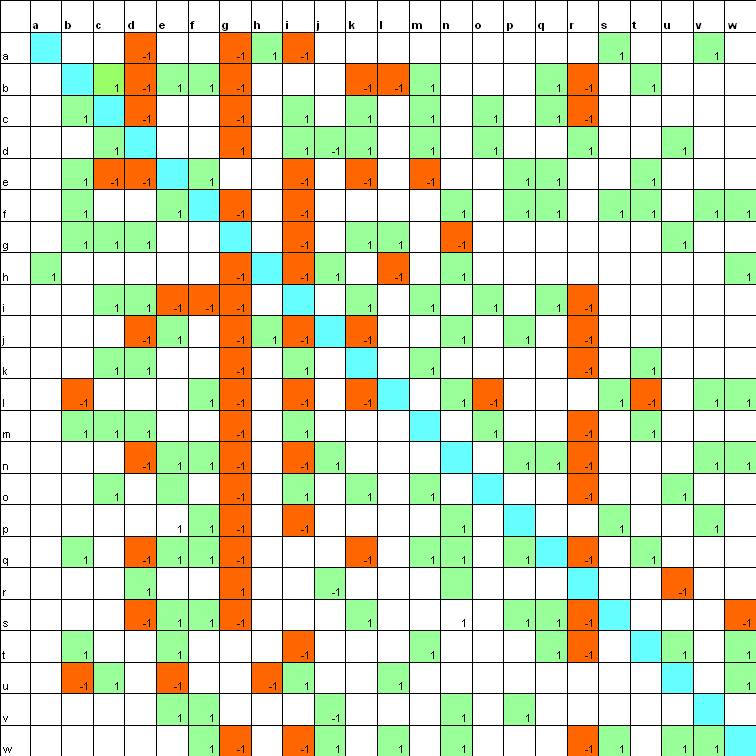
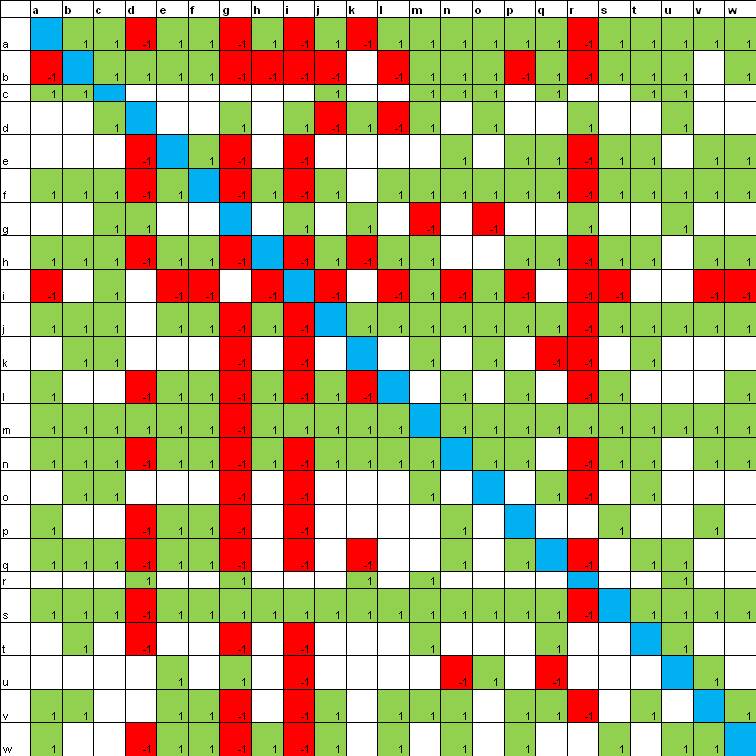
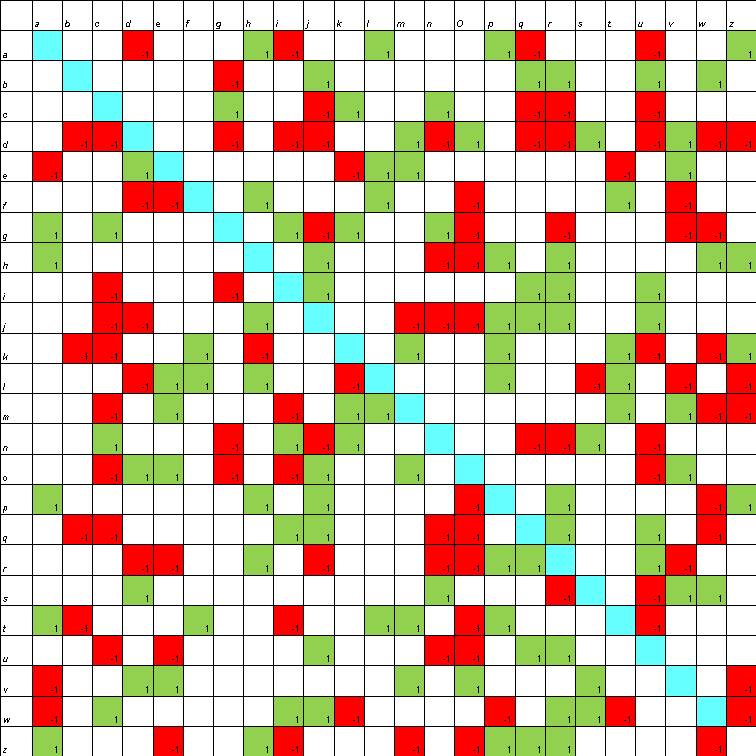
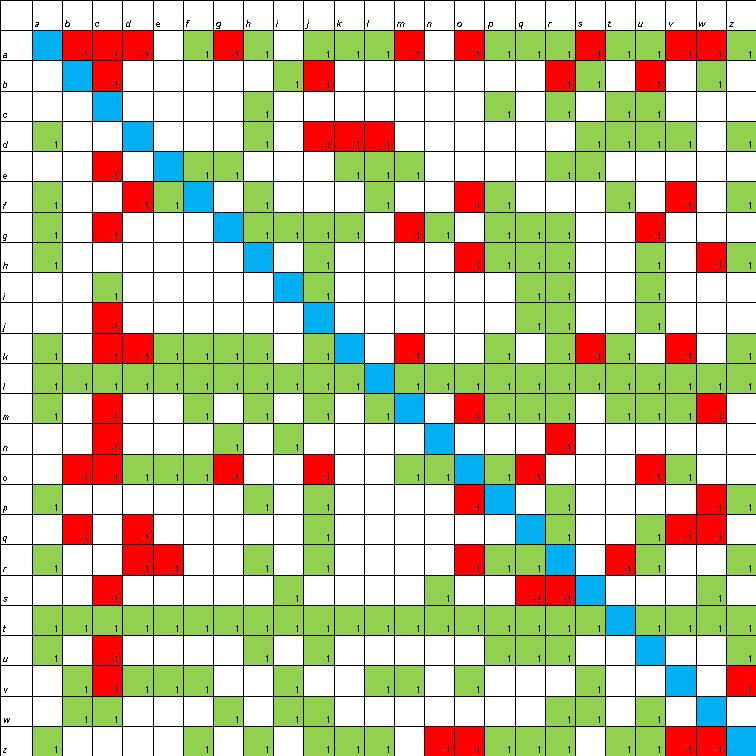
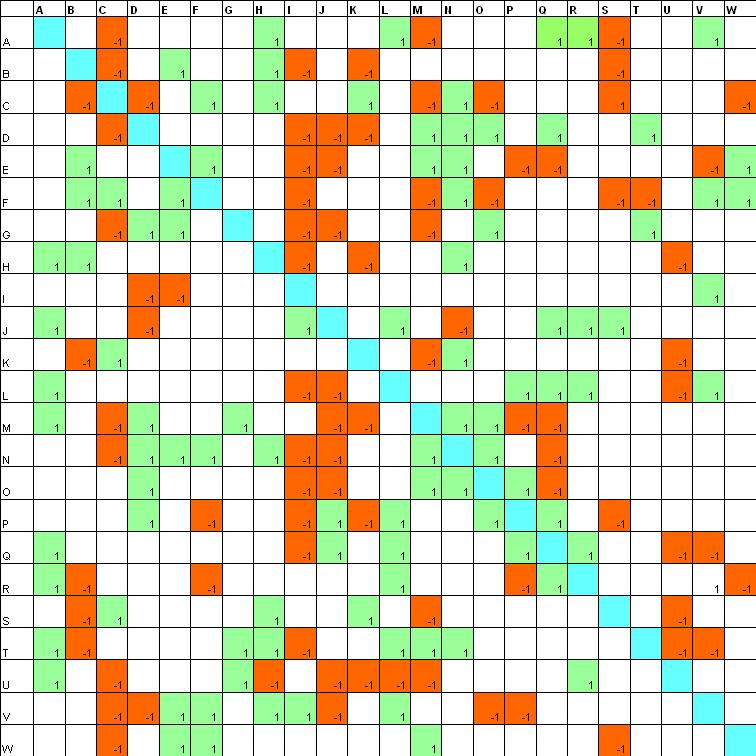
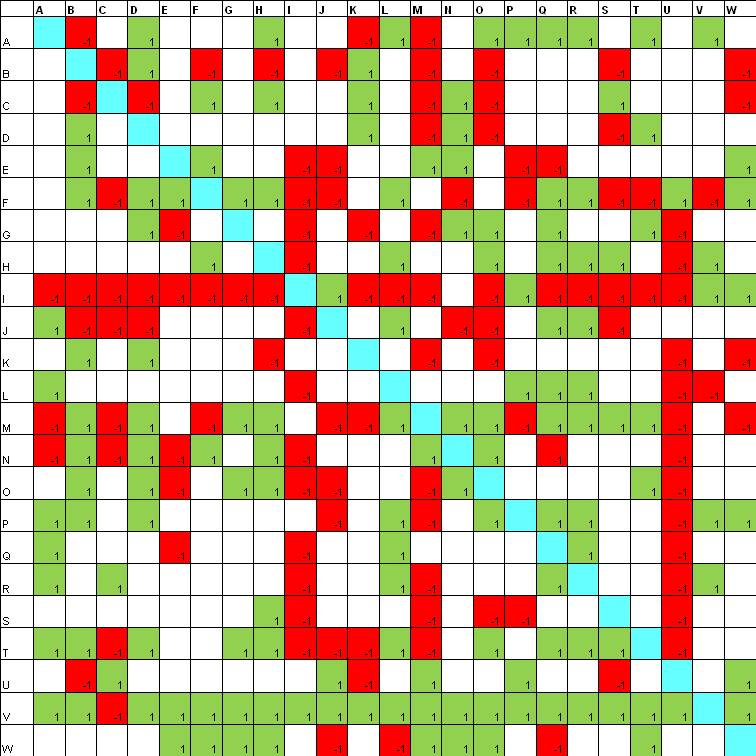
然后第一步是将数据填入一个名为社会矩阵的双入口表格中。在此表格中,横坐标和纵坐标轴上分别是小组成员的姓名:横向表示给出的选择(或拒绝),纵向表示收到的选择(或拒绝)。选择用“1”表示,排斥用“‐1”表示。
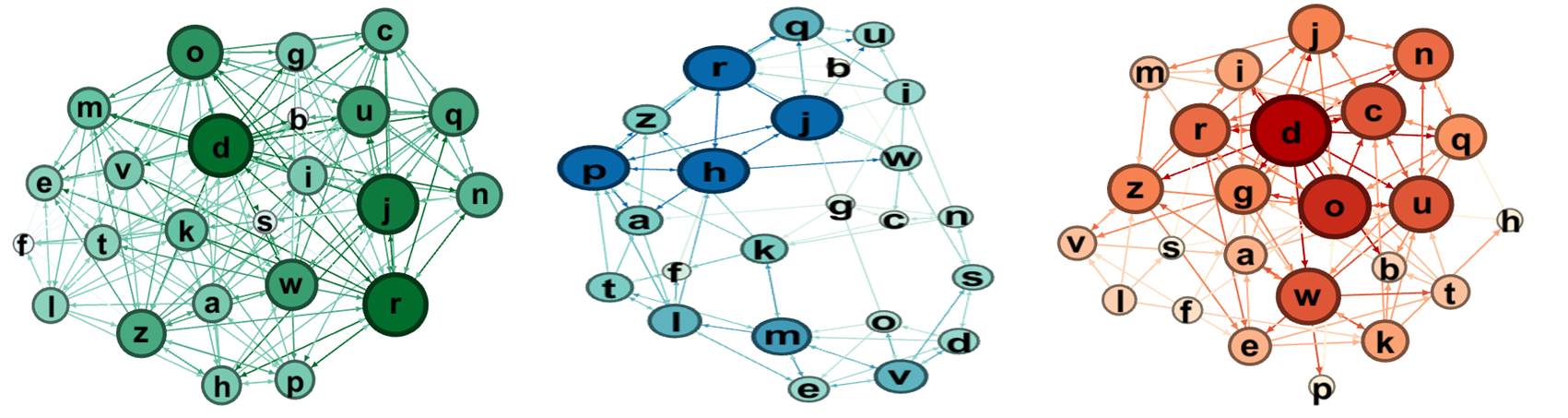
让我们考虑一个由A、B、C和D组成的非常小的儿童小组。那么我们将得到一个在横坐标和纵坐标上各有4个元素的方阵。如果A选择了B,我们将在A(横向)与B(纵向)的交叉处填入+1。如果C拒绝了D,我们将在C(横向)与D(纵向)的交叉处填入‐1。这些社会计量数据也可以用称为社会关系图的图形形式来表示。它是一种包含节点和连线的网络图。节点代表小组中的学生,即小组的成员,而连线则代表联系,即关系(不同类型的线用于区分选择和拒绝)。此外,每条线有一个或两个箭头,表示关系的方向以及该关系是单向的还是双向的。在社会关系图中,A、B、C和D将作为节点,以圆形表示,并通过具有不同图形特征的连线相互连接,对应不同类型的关系(参见第4节中的图示)。
从社会关系图和社会矩阵中,可以明确:小组中每个成员所获得的总选择数和拒绝数;选择和拒绝的互惠程度;被忽视的、被拒绝的、孤立的以及受欢迎的个体之间的差异。
受欢迎的个体是指收到大量选择的个体,因此他们在小组中具有更大的影响力和更大的权力。而被拒绝的个体是指收到大量拒绝的个体。最后,孤立的个体是指收到选择数量非常少的个体。最后一类包括:
- 被小组忽视但通过表达自己的选择证明自己对他人开放且可亲近的个体,
- 被忽视且倾向于自我孤立的个体,他们既不表达选择也不表达拒绝。
除了社会关系图和社会矩阵外,还可以对从社会测量工具中得出的指标使用统计技术。社会测量工具为第2组的互动和动态提供了大量数据。
3.1.4 程序
如前所述,为验证不同活动对同龄群体中人际关系影响的三种条件是:机器人活动实验室、使用Scratch进行编程的编程实验室,以及对照组。各小组被随机分配到以下三种实验条件之一:教育机器人实验室、使用Scratch的编程实验室和无小组活动。社会测量测试在两个时间点提供给参与者(属于三个实验组的学生):9月25日(即实验室活动开始前:前测)和11月29日(即实验室活动结束时:后测)。活动持续六周,每周一次会议,每次持续一到两小时(总计10小时)。为开展活动,学生被分成若干子组,这些子组由不同的学生在每次会议中完成。下一小节将更详细地描述实验室活动。
3.1.5 实验室活动
在实验室活动中,安排了六次周会,每次持续1或2小时,参与者遵循了不同的路径。
总之,在机器人实验室中,开展了以下活动:制作关于技术、机器人搭建和编程的海报,以及构建代表机器人移动环境的道路路线。
在使用Scratch的编程实验室中,学生参与了以下活动:制作关于技术主题的海报,创建角色(Scratch编程环境中的一个元素,可被视为智能体;参见Ponticorvo等人,2017),创建舞台(角色互动的场所),对角色在空间迷宫中的行为进行编程,以及构建表示角色移动环境的多媒体路线。这些活动的设计旨在使参加机器人实验室和编程实验室的学生所完成的任务具有可比性。
不同之处在于,在机器人实验室中,参与者使用了实体材料来构建机器人并实现道路路线,而编程实验室的参与者则仅通过软件在数字环境中开展他们的活动。
我们研究小组之前的研究表明,这一要素在促进不同的认知和社会过程中可能具有重要意义(Ferrara等人,2016;Di Fuccio等人,2015)。
更详细地说,教育机器人实验室的安排如下:在第一次活动中,研究人员通过讲授式互动课程讲解了技术,并介绍了机器人作为具有感知‐运动系统的人工制品的定义。在第一次活动结束时,参与者被分为五个小组,以自主地和协作地制作关于技术和机器人的海报。在第二次活动中,学生再次被分为五个不同的小组,与之前的分组不同。每个小组使用上述工具构建一个机器人。学生必须在小组中协作,共同努力实现共同目标。
在第三次会议中,介绍了用于编程机器人的软件,学生使用该软件来实现机器人控制系统。参与者再次被分成小组,并共同合作制定机器人的策略。在第四次和第五次会议中,他们借鉴自己所在城市的特点,以创造性方式设计并搭建了机器人的街道路径。第六次会议则专注于编写代码,并将代码传输到机器人,使其能够按照街道路径行进,此过程始终以小组形式进行。
Scratch编程实验室的结构非常相似:在第一次活动中,研究人员通过讲授式互动课程介绍了技术,并引入了用于编程的软件Scratch。活动结束时,学生被分成五个小组,自主且协作地制作关于技术和Scratch的海报。第二次活动在计算机教室进行,介绍了Scratch的基本功能。随后,参与者被分成小组,并共同在Scratch中实现了一些元素。
在第三次会议中,展示了如何在Scratch中对元素进行编程,然后将他们分成小组,以确定编程策略来通过空间迷宫。
在第四次和第五次会议期间,学生被分成小组,借鉴他们所在城市的元素,实施了多媒体项目。
在最后一次会议上,实现了一条街道路径,并组成了新的小组来编写代码和序列,以遵循多媒体街道路径。


3.2 结果
在本节中,我们报告了每种条件下干预开始和结束时的社会关系图和社会矩阵,比较了三种条件的指标,然后使用t检验对比了项目开始和结束时的选择和排斥数量。
3.2.1 社会关系图与社会矩阵分析
社会关系图和社会矩阵是基于三个小组的前测和后测数据构建的。第1组开展了教育机器人实验室活动;第2组进行了使用Scratch的编程实验室活动;第3组为对照组。本文报告了关于情感标准的社会关系图和社会矩阵。
在社会矩阵中,使用绿色框内的数字1表示小组成员的选择,红色框内的‐1表示排斥。此外,还记录了同龄群体中每个学生的总选择数和总拒绝数(包括表达和收到的)。
在学年开始时,可以观察到有六名学生能够吸引较多的选择(8和9,为最高值),还有两名学生收到超过10次的拒绝。
实验活动结束后,同龄人之间的选择明显增多,获得较多选择的学生人数也增加(16名学生获得了10次或更多的选择)。同时,拒绝次数也有所增加,有4名学生受到超过10次拒绝。
在参与编程活动的小组中,学年开始时有276名学生获得了8‐9个选择,一名学生收到了10次拒绝。在这种情况下,选择的数量也在增加:七名学生获得10个或更多选择,而只有一名学生收到超过10次拒绝。
在对照组中,第一次评估时,有两名参与者收到8‐9个选择,282名参与者被拒绝超过10次。项目结束时,选择的数量增加,三名参与者收到超过10次拒绝。
社会矩阵是其他分析的基础,能够以综合的方式提供大量相关信息。
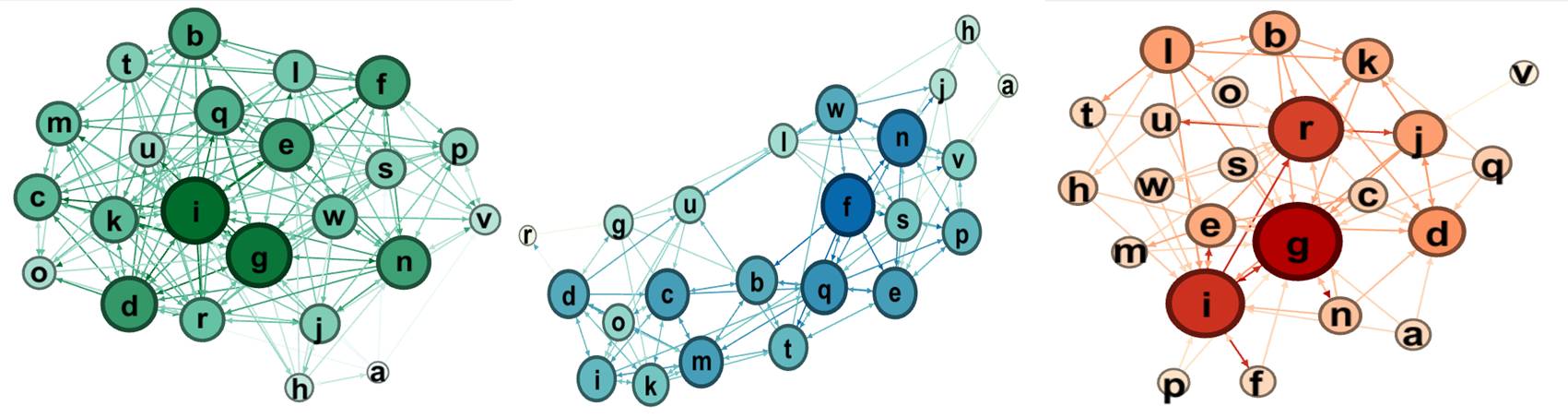
从社会矩阵出发,我们构建了社会关系图,并使用Gephi软件(Bastian等人,2009)计算了多种指标,如加西亚‐马加里诺(2019)所述。Gephi是一款用于社交网络分析和可视化的开源软件。
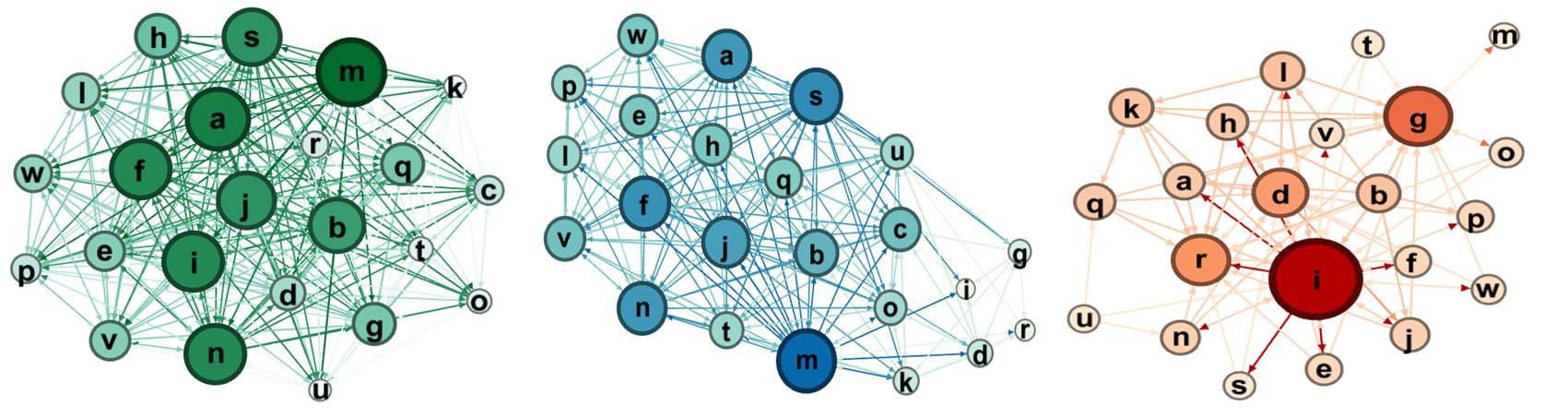
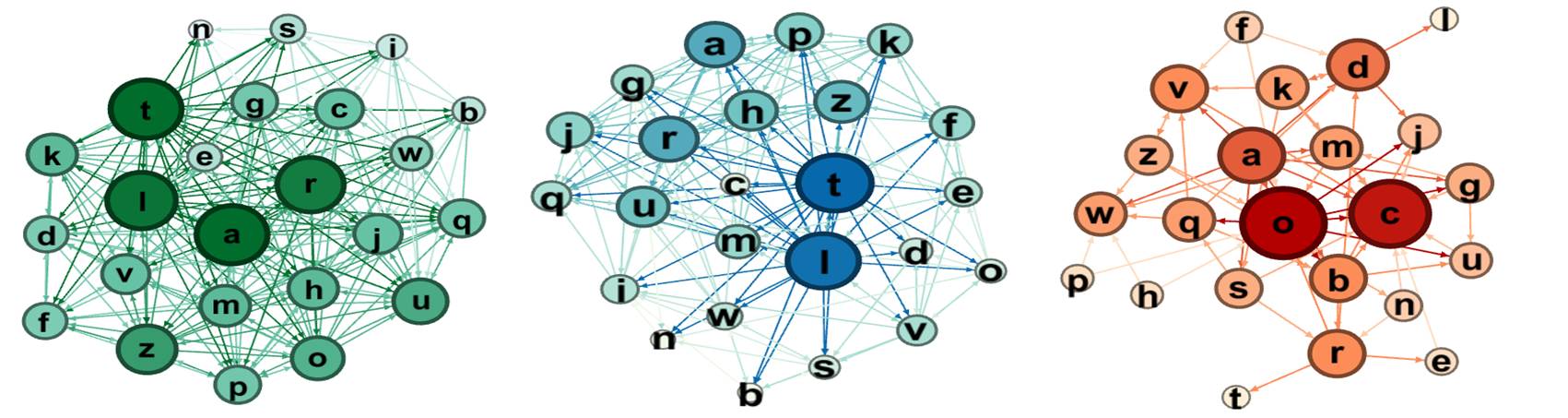
此处我们报告了三个实验组在前测和后测中的社会关系图,考虑整体关系,即同时考虑选择和排斥的社会关系图,然后分别报告选择和排斥的情况。
这两个时刻的社会关系图定性比较显示出一些有趣的动态。在机器人小组中,网络变得更加紧密:特别是选择关系显示出更多的联系。从拒绝组的节点来看,在后测中只有一个节点收到大量的排斥。
对于编程小组,我们观察到有更多的选择,尤其是随着排斥联系的减少,选择关系显著增加。
如果考虑拒绝情况,在控制条件下拒绝显著增加,而在机器人条件下,拒绝的数量基本保持不变。
对于对照组而言,前测与后测的比较表明,由于时间间隔的影响,小组内的联系增加了316条,这符合我们的预期,但值得注意的是,拒绝的联系增加了317条。
| 节点 | 节点 | 边 | 边 | 边 | 平均值 | 平均值 | 平均值 | 指数 | 指数 | 连贯性 | 连贯性 | 连贯性 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Pre | Pre | Post | Pre | Post | Post | Pre | Post | Pre | Pre | Post | |
| 机器人小组 | |||||||||||||
| 总(计社会强度指数) | 23 | 23 | 196 | 323 | 323 | 8.52 | 14 | 14 | 0.387 | 0.638 | 0.56 | 0.62 | 0.62 |
| 选(择凝聚指数) | 23 | 23 | 126 | 239 | 239 | 5.48 | 10.39 | 10.39 | 0.25 | 0.472 | 0.67 | 0.65 | 0.65 |
| 排(斥分离指数) | 23 | 22 | 70 | 84 | 84 | 3 | 3.8 | 3.8 | 0.138 | 0.182 | 0.2 | 0.33 | 0.33 |
| 编码小组 | |||||||||||||
| 总(计社会强度指数) | 24 | 24 | 206 | 255 | 255 | 8.59 | 8.59 | 10.6 | 0.373 | 0.462 | 0.53 | 0.42 | 0.42 |
| 选(择凝聚指数) | 24 | 24 | 107 | 193 | 193 | 4.46 | 4.46 | 8 | 0.194 | 0.35 | 0.64 | 0.48 | 0.48 |
| 排(斥分离指数) | 24 | 24 | 99 | 162 | 162 | 4.125 | 4.125 | 2.7 | 0.179 | 0.123 | 0.30 | 0.16 | 0.16 |
| 对照组 | |||||||||||||
| 总计 (社会强度指数) | 23 | 23 | 184 | 262 | 262 | 8 | 8 | 11.4 | 0.364 | 0.518 | 0.55 | 0.53 | 0.53 |
| 选择 (凝聚度指数) | 23 | 23 | 98 | 146 | 146 | 4.3 | 4.3 | 6.3 | 0.194 | 0.289 | 0.65 | 0.41 | 0.41 |
| 排斥 (分离指数) | 23 | 23 | 86 | 116 | 116 | 3.7 | 3.7 | 5 | 0.17 | 0.229 | 0.33 | 0.34 | 0.34 |
表1 实验组在前测和后测中通过Gephi软件获得的指标。
平均值是连接(边)与参与者(节点)之间的比率。指数列报告了社会强度、凝聚度、分离指数;连贯性列表示社交网络的连贯性。
这些分析表明,机器人实验室在促进动态发展方面可能有效,这种动态发展可导致每位参与者在个人层面以及小组作为动态实体的地位发生改变。
在编程实验室中,社会强度和选择指标略有增加,排斥指标略有下降:这表明网络发生了轻微变化。在对照组中,所有指标都略有增加,这是由于与学校相关的互动所预期的结果。
在三个实验条件下,指标显示从前测到后测有所增加,共349次选择。
为了更好地理解机器人实验室相较于编程活动所产生的影响,我们进行了统计分析,其结果将在下一节中报告。
3.2.2 关于选择和拒绝的统计分析
在本节中,我们报告了机器人实验室、编程实验室和对照组中选择与拒绝次数的分析:具体而言,我们分析了项目开始和结束时选择与拒绝之间的差异。活动开始和结束时是否存在差异?该研究问题的结果见表2。
| 选择 | 拒绝组 | ||||
|---|---|---|---|---|---|
| t检验 | p值 | t检验 1,834425 0 | p值 ,079561 | ||
| 机器人技术 | 7,71507274 | ≃0* | 3,279852 0 | ,003286* | |
| 编程 | 6,87784727 | ≃0* | |||
| Control | 3,73671073 0 | ,001079202 | 2,998793 0 | ,006408* |
表2 三种实验条件下前测与后测在收到的选择和拒绝方面的比较(p值 < 0.05者以星号标记)
为了回答“机器人技术在促进同伴小组关系方面是否比其他条件更有效?”这一问题,我们使用SPSS®软件对三种条件在两个时间点(前测和后测)进行了单因素方差分析。
前测中,方差分析显示三种条件之间在选择上无显著差异:F(2,67)=1.803;p=0.173;在排斥上也无显著差异:F(2,67)=0.574;p=0.566。
相反,在后测中,如果考虑选择情况,则差异显著:F(2,67)=7.569;p=0.001(针对选择)。事后比较(邦弗罗尼法)表明,机器人条件与对照组之间出现了具有统计学意义的差异:平均值差异=4.043;p=.001。
讨论与结论
如今,教育机器人已成为课程路径中的常见环节;我们所描述的实验及相关数据表明,参加机器人实验室的学生小组内部人际关系出现了显著改善。这一变化在与对照组和编程实验室的比较中尤为明显。
该结果可能源于学习视角的转变,即学习变得更加主动,从而改变了学生之间的互动方式。事实上,根据建构主义方法,这类活动为学生提供了以不同方式与同龄人建立关系的机会,进而理解彼此的心理亲和性。为了完成机器人技术任务,参与者必须以相互依赖的方式进行合作,而大多数课程活动则是个人独立完成的。教育机器人促使学生从个体活动转向小组活动,从而必须建立一种相互依赖的关系:那些在同龄群体中融入不佳的学生因此获得了积极参与任务解决的新机会,从而改善了与其他学生的关系。
本研究确实存在一些局限性,例如,实验是在已有的固定小组(班级)中进行的,因此无法调整小组组成。此外,对小组的跟踪时间相对较短,未来有必要进一步验证这些积极变化是否能够长期保持。
从这些结果可以看出,教育机器人实验室及相关活动可能是促进和支持学生之间建立新且令人满意关系的有效方法。结果部分报告的数据表明,在教育机器人条件下,选择次数的增加高于其他条件,从而显示出机器人教育活动可能具有一些特定特征,有助于改善同龄人之间的关系,而这种关系反过来又是防止辍学的保护性因素。
一些问题仍然尚未解决:在参与机器人实验室的小组中,仍有少量392名参与者被拒绝。这取决于个体参与者还是第3组的组织?如果取决于个体,那么相关的心理变量有哪些?
未来的研究将致力于解决这一问题,并与开展不同活动的教育机器人实验室进行比较,这些活动包括与实物互动(如手工、艺术、音乐工作坊等)。这些新实验将探讨社会关系的提升是否能够通过开展教育机器人实验室活动而实现,或者这种提升是否与其他涉及操作的小组活动的效果相当。
第一个项目之后,在2019年1月至5月期间,开展了范围更广的Codinc项目(包容性编码)。在这个欧洲资助的项目中,教育机器人与社会测量工具相结合,成为评估同伴关系的背景,并构成了Codinc方法的核心,因为它提供了在不同于同龄人在学校日常互动的情境下描绘人际关系的机会。
资金
本研究由欧盟CODINC项目(580362‐EPP‐1‐2016‐1‐IT‐EPPKA3‐IPI‐SCO‐IN)根据伊拉斯谟+资助。


















 129
129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










