




 超级会员免费看
超级会员免费看
 本文详细介绍了相机标定的过程,包括相机内参和外参的求解,张正友标定方法,以及畸变系数的计算。通过理论分析和Python代码实现,阐述了相机坐标系、图像坐标系的概念,以及如何利用标定模板进行相机标定,以提高图像测量和机器视觉应用的准确性。
本文详细介绍了相机标定的过程,包括相机内参和外参的求解,张正友标定方法,以及畸变系数的计算。通过理论分析和Python代码实现,阐述了相机坐标系、图像坐标系的概念,以及如何利用标定模板进行相机标定,以提高图像测量和机器视觉应用的准确性。
目录
前言
相机标定指建立相机图像像素位置与场景点位置之间的关系,根据相机成像模型,由特征点在图像中坐标与世界坐标的对应关系,求解相机模型的参数。相机需要标定的模型参数包括内部参数和外部参数。
针孔相机成像原理其实就是利用投影将真实的三维世界坐标转换到二维的相机坐标上去,其模型示意图如下图所示:
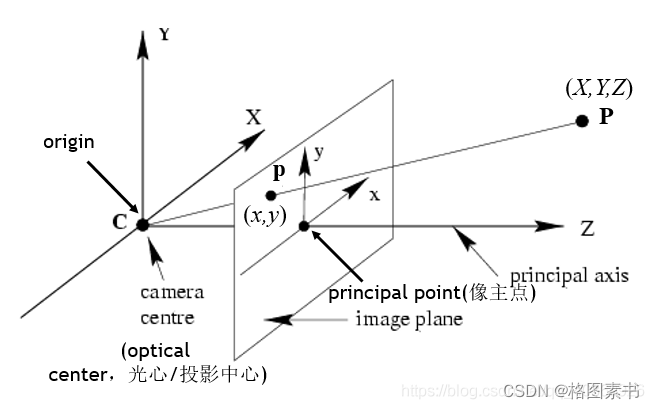
从图中我们可以看出,在世界坐标中的一条直线上的点在相机上只呈现出了一个点,其中发生了非常大的变化,同时也损失和很多重要的信息,这正是我们3D重建、目标检测与识别领域的重点和难点。实际中,镜头并非理想的透视成像,带有不同程度的畸变。理论上镜头的畸变包括径向畸变和切向畸变,切向畸变影响较小,通常只考虑径向畸变。
径向畸变:径向畸变主要由镜头径向曲率产生(光线在远离透镜中心的地方比靠近中心的地方更加弯曲)。导致真实成像点向内或向外偏离理想成像点。其中畸变像点相对于理想像点沿径向向外偏移,远离中心的,称为枕形畸变;径向畸点相对于理想点沿径向向中心靠拢,称为桶状畸变。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















&spm=1001.2101.3001.5002&articleId=134549018&d=1&t=3&u=7ba8831f3f494f5cb70ff2c252c8a9fa)

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












