




 VL53L0X是意法半导体开发的激光测距模块,采用TOF原理,具备高集成度、高精度和快速测量速度。程序示例展示了如何通过I2C通信读取模块距离数据并经串口输出。该模块广泛应用于自动驾驶、工业自动化、智能家居等领域。
VL53L0X是意法半导体开发的激光测距模块,采用TOF原理,具备高集成度、高精度和快速测量速度。程序示例展示了如何通过I2C通信读取模块距离数据并经串口输出。该模块广泛应用于自动驾驶、工业自动化、智能家居等领域。
1、VL53L0X激光测距模块
VL53L0X是一种集成了激光测距功能的传感器模块,由STMicroelectronics(意法半导体)公司开发。它使用时飞行时间(Time-of-Flight,TOF)测量原理,可以实现精确、快速的非接触式测量。
下面是关于VL53L0X激光测距模块的详细介绍:
1. **工作原理**:
VL53L0X激光测距模块通过发射一束激光脉冲,并测量该激光脉冲从发射到被接收的时间来计算出物体与传感器之间的距离。它通过测量激光脉冲的飞行时间来确定物体的位置,实现非接触式的测距操作。
2. **特点和功能**:
- 高度集成:VL53L0X模块集成了激光发射器、激光接收器、飞行时间测量电路和信号处理单元等核心组件,使其具有小巧、轻便的特点。
- 高测量精度:模块具有较高的测量精度,可以在短时间内进行精确的测距操作,并提供与物体的距离相关的输出数据。
- 快速测量速度:VL53L0X模块能够在几毫秒的时间内完成一次测量,适用于对快速移动的物体进行测距。
- 多种工作模式:模块支持不同的工作模式,如单次测量模式、连续测量模式等,可以根据具体应用场景选择合适的工作模式。
- 多级测量范围:VL53L0X模块具有多级测量范围的功能,可以根据需要选择不同的测量范围(通常是几毫米到几米)。
3. **应用领域**:
VL53L0X激光测距模块在许多领域都有广泛的应用,包括但不限于以下领域:
- 自动驾驶和智能交通系统:用于测量车辆与障碍物之间的距离,以实现智能避障和自动刹车等功能。
- 工业自动化和机器人技术:用于测量机器人与周围环境的距离,实现精确定位和避障功能。
- 智能家居和物联网应用:用于测量家具、门窗和其他物体的距离,实现智能控制和触发功能。
- 安防系统和监控技术:用于测量人体或物体与安全区域的距离,实现入侵检测和安全报警等功能。
- 科学研究和实验室应用:用于测量实验器件和物体的精确距离,提供数据支持和分析。
总的来说,VL53L0X激光测距模块是一种高度集成、精确可靠的测距传感器,可广泛应用于各种应用场景中需要快速、精确测量距离的场合。
2、程序实现
这个程序是用来读取VL53L0X激光测距模块的距离数据,并通过串口输出到计算机。下面是程序的描述:
包含了所需的头文件Wire.h 和 vl53l0x_class.h。
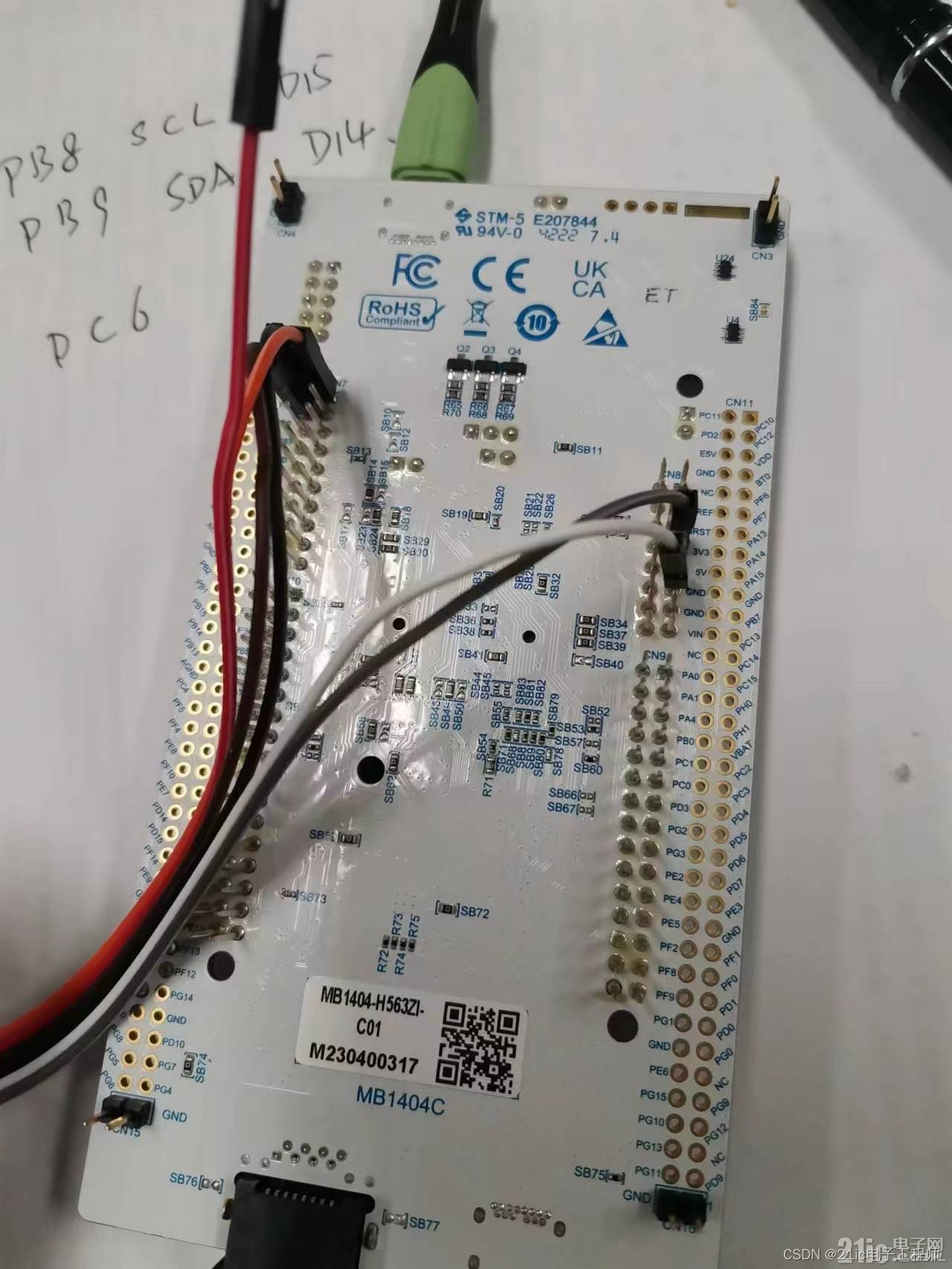
创建了一个名为 WIRE1 的 TwoWire 实例,用于配置I2C通信线路。SDA线路为PB9引脚,SCL线路为PB8引脚。
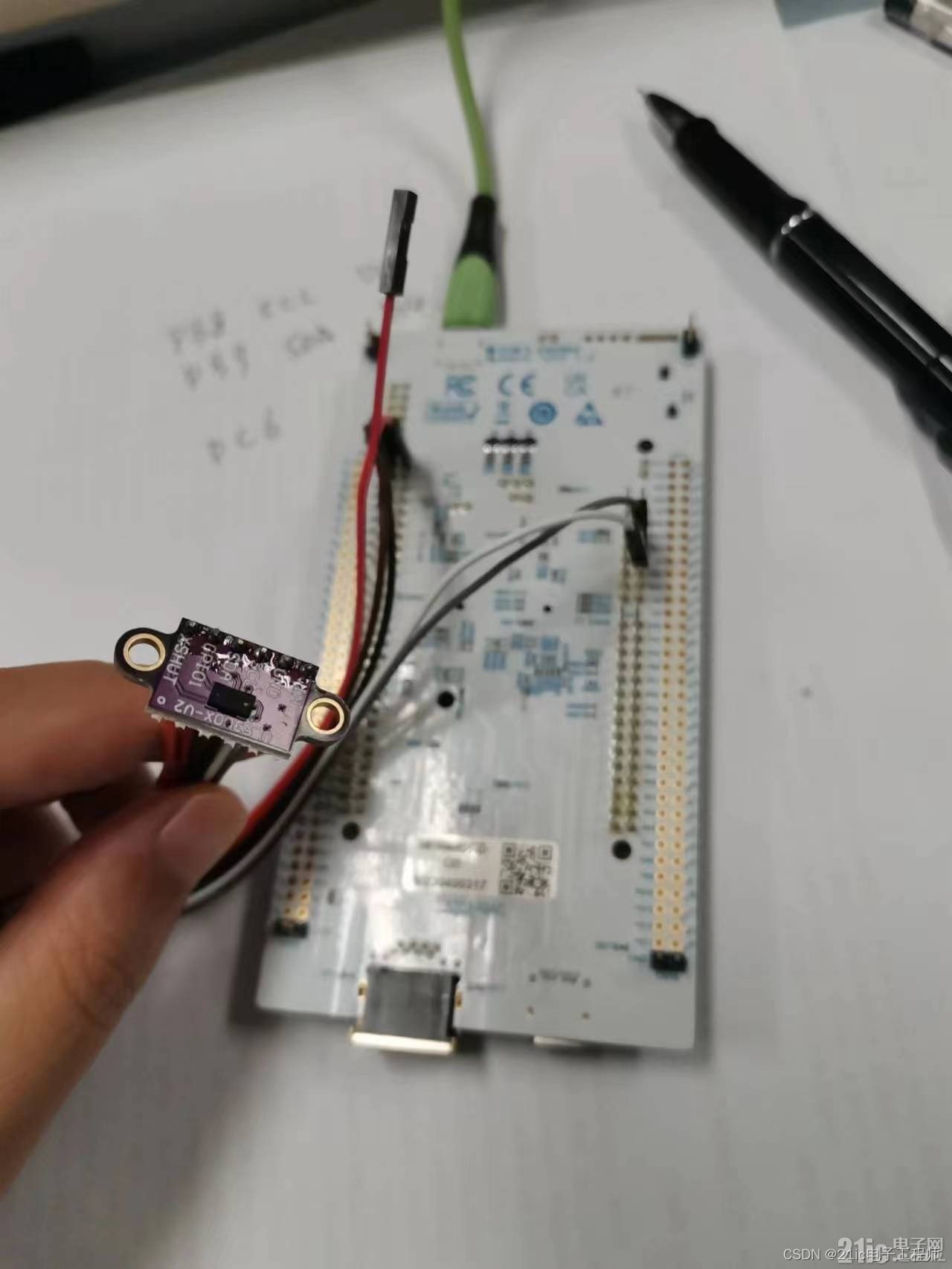
创建了一个名为 sensor_vl53l0x 的 VL53L0X 实例,通过定义的 WIRE1 实例来初始化VL53L0X模块,XSHUT引脚连接到PC6引脚。
在 setup 函数中进行初始化设置:
- 配置PB0引脚为输出模式,用作LED。
- 通过串口(Serial)以9600波特率初始化用于串口输出。
- 初始化I2C总线。
- 配置VL53L0X模块。
- 关闭VL53L0X模块。
- 初始化VL53L0X模块,初始化时使用地址0x10。
在 loop 函数中进行循环操作:
- 闪烁LED,将PB0引脚设置为高电平,延时100毫秒,然后将PB0引脚设置为低电平。
- 读取距离数据,使用GetDistance 函数从VL53L0X模块读取距离值,并将返回的状态保存至 status 变量。
- 如果读取距离数据成功(status 等于 VL53L0X_ERROR_NONE):
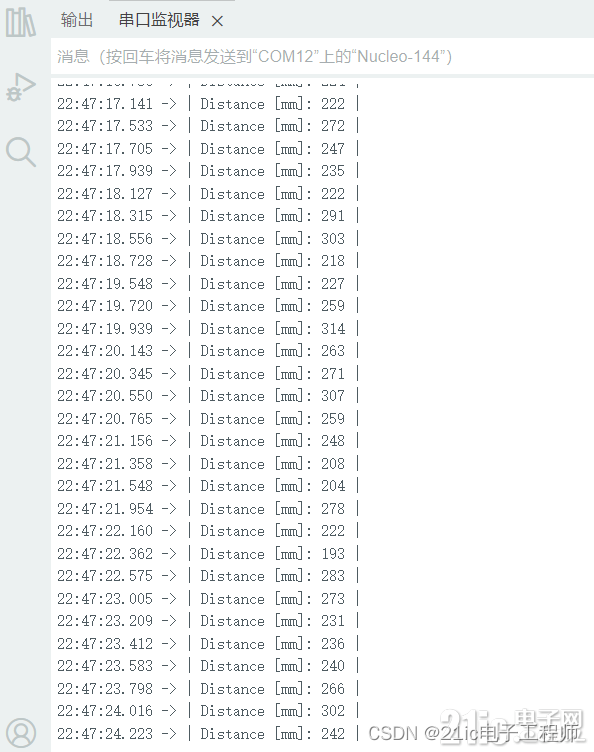
- 格式化距离数据为字符串,并将其输出到串口,以格式为 "| Distance [mm]: 距离值 |" 的形式。
这样,程序就会不断地闪烁LED,并通过串口输出VL53L0X模块测得的距离值。
#include <Wire.h>
#include <vl53l0x_class.h>
// Create components.
TwoWire WIRE1(PB9, PB8); //SDA=PB11 & SCL=PB10
VL53L0X sensor_vl53l0x(&WIRE1, PC6); //XSHUT=PC6
/* Setup ---------------------------------------------------------------------*/
void setup() {
int status;
// Led.
pinMode(PB0, OUTPUT);
// Initialize serial for output.
Serial.begin(9600);
// Initialize I2C bus.
WIRE1.begin();
// Configure VL53L0X component.
sensor_vl53l0x.begin();
// Switch off VL53L0X component.
sensor_vl53l0x.VL53L0X_Off();
// Initialize VL53L0X component.
status = sensor_vl53l0x.InitSensor(0x10);
if(status)
{
Serial.println("Init sensor_vl53l0x failed...");
}
}
/* Loop ----------------------------------------------------------------------*/
void loop() {
// Led blinking.
digitalWrite(PB0, HIGH);
delay(100);
digitalWrite(PB0, LOW);
// Read Range.
uint32_t distance;
int status;
status = sensor_vl53l0x.GetDistance(&distance);
if (status == VL53L0X_ERROR_NONE)
{
// Output data.
char report[64];
snprintf(report, sizeof(report), "| Distance [mm]: %ld |", distance);
Serial.println(report);
}
}
3、效果图
---------------------
作者:xu@xupt
链接:https://bbs.21ic.com/icview-3316512-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。


















 236
236

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










