




 博客主要介绍了OpenCV中的角点检测方法,包括Harris角点检测及绘制、Shi - Tommasi角点检测和亚像素级角点检测,使用C++语言实现。
博客主要介绍了OpenCV中的角点检测方法,包括Harris角点检测及绘制、Shi - Tommasi角点检测和亚像素级角点检测,使用C++语言实现。
Harris角点检测
void cornerHarris(InputArray src, //Mat类,单通道8位浮点型图像
OutputArray dst,//用于存放Harris角点检测的输出结果
int blockSize, //表示领域的大小
int ksize, //表示Sobel()算子的孔径大小
double k, //Harris参数
intborderType=BORDER_DEFAULT)
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace cv;
int main()
{
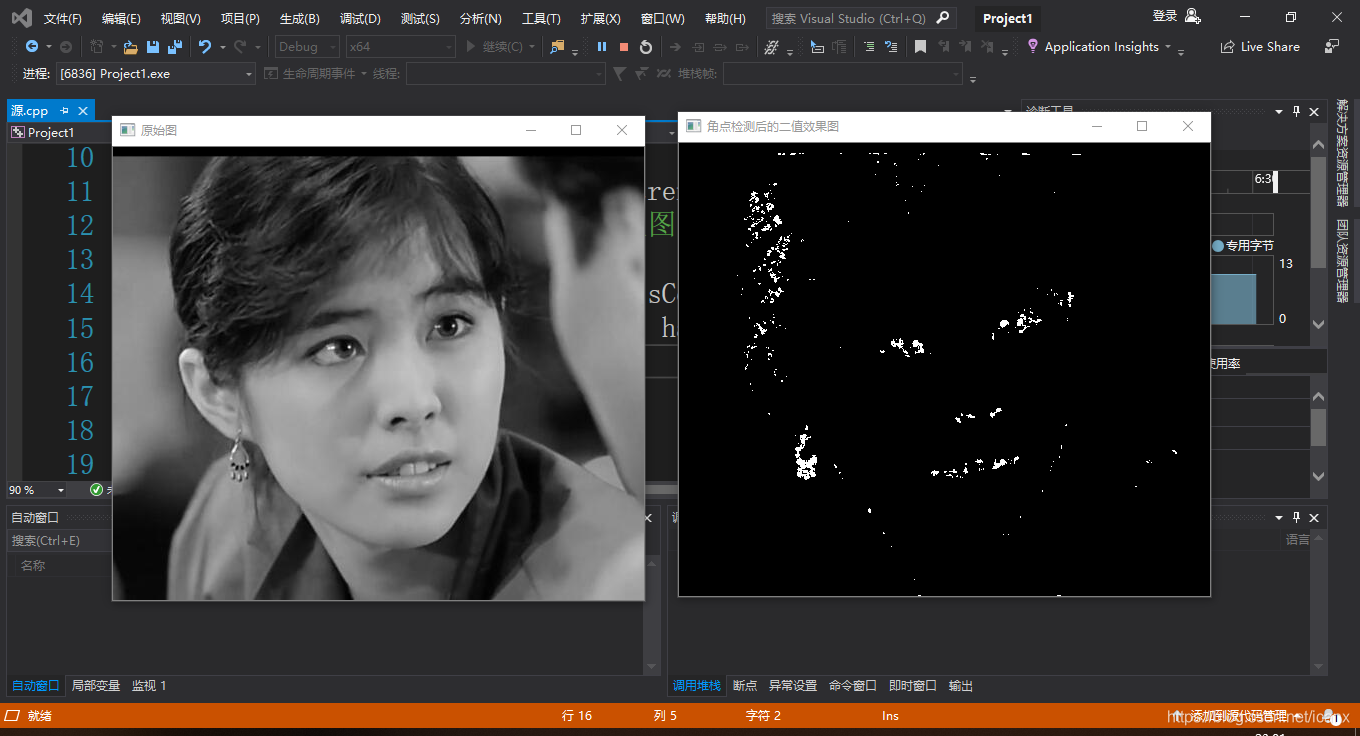
//以灰度模式载入图像并显示
Mat srcImage = imread("1.jpg", 0);
imshow("原始图", srcImage);
//进行Harris角点检测找出角点
Mat conrnerStrength;
cornerHarris(srcImage, conrnerStrength, 2, 3, 0.01);
//对灰度图进行阈值操作,得到二值图并显示
Mat harrisCorner;
threshold(conrnerStrength, harrisCorner, 0.00001, 255,THRESH_BINARY);
imshow("角点检测后的二值效果图", harrisCorner);
waitKey(0);
return 0;
}
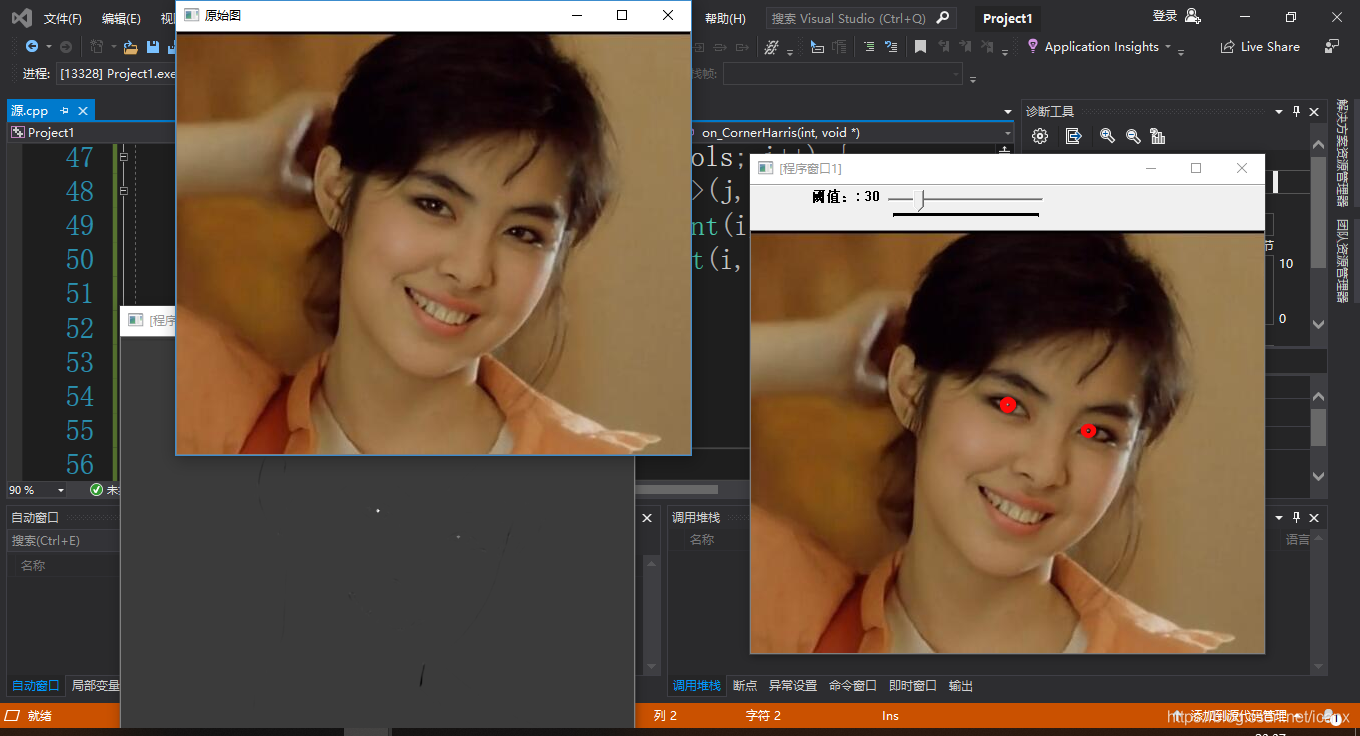
Harris角点检测与绘制
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace cv;
#define WINDOW_NAME1 "[程序窗口1]"
#define WINDOW_NAME2 "[程序窗口2]"
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 30;//当前阈值
int max_thresh = 175;//最大阈值
void on_CornerHarris(int, void*);
int main()
{
g_srcImage = imread("4.jpg", 1);
if (!g_srcImage.data) {
printf("fail to load image!");
return -1;
}
imshow("原始图", g_srcImage);
g_srcImage1 = g_srcImage.clone();
//存留一张灰度图
cvtColor(g_srcImage1, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE);
createTrackbar("阈值:", WINDOW_NAME1, &thresh, max_thresh, on_CornerHarris);
//调用一次回调函数,进行初始化
on_CornerHarris(0,0);
waitKey(0);
return 0;
}
void on_CornerHarris(int, void*)
{
//定义一些变量
Mat dstImage;//目标图
Mat normImage;//归一化后的图
Mat scaledImage;//线性变换后的八位无符号整型图
//初始化
dstImage = Mat::zeros(g_srcImage.size(),CV_32FC1);
g_srcImage1 = g_srcImage.clone();
//正式检测
cornerHarris(g_grayImage,dstImage,2,3,0.04,BORDER_DEFAULT);
//归一化与转换
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, scaledImage);
//进行绘制
for (int j = 0; j < normImage.rows; j++) {
for (int i = 0; i < normImage.cols; i++) {
if ((int)normImage.at<float>(j,i) > thresh + 80) {
circle(g_srcImage1, Point(i, j), 5, Scalar(10, 10, 255), 2, 9, 0);
circle(g_srcImage, Point(i, j), 5, Scalar(0, 10, 255), 2, 8, 0);
}
}
}
imshow(WINDOW_NAME1, g_srcImage1);
imshow(WINDOW_NAME2, scaledImage);
}
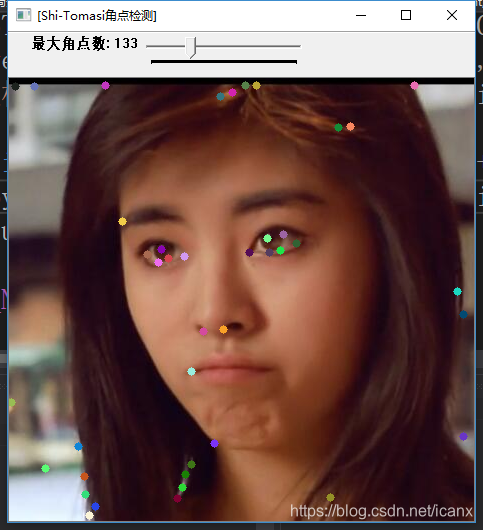
Shi-Tommasi角点检测
void goodFeaturesToTrack(InputArray image,//输入图像为8位或浮点型32位单通道
OutputArray corners,//检测到的角点的输出向量
int maxCorners,//角点的最大数量
double qualityLevel,//角点检测可接受的最小特征值
double minDistance,//角点之间的最小距离
InputArray mask = noArray(),//感兴趣区域
int blockSize = 3,//默认值3,计算导数自相关矩阵时指定的领域范围
bool useHarrisDetector = false,//默认false,指示是否使用Harris角点检测
double k=0.04)
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
#define WINDOW_NAME "[Shi-Tomasi角点检测]"
Mat g_srcImage,g_grayImage;
int g_maxCornerNumber = 33;
int g_maxTrackbarNumber = 500;
RNG g_rng(12345);
void on_GoodFeaturesToTrack(int, void*);
int main()
{
g_srcImage = imread("2.jpg", 1);
if (!g_srcImage.data) {
printf("fail to load image!");
return -1;
}
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME, WINDOW_AUTOSIZE);
createTrackbar("最大角点数", WINDOW_NAME, &g_maxCornerNumber,
g_maxTrackbarNumber, on_GoodFeaturesToTrack);;
imshow(WINDOW_NAME, g_srcImage);
on_GoodFeaturesToTrack(0,0);
waitKey(0);
return 0;
}
void on_GoodFeaturesToTrack(int, void*)
{
if (g_maxCornerNumber <= 1)
g_maxCornerNumber = 1;
//Shi-Tomasi算法参数准备
vector<Point2f>corners;
double qualityLevel = 0.01;//角点检测可接受的最小特征值
double minDistance = 10;//角点之间的最小距离
int blockSize = 3;//计算导数自相关时指定的领域范围
double k = 0.4;//权重系数
Mat copy = g_srcImage.clone();
//进行Shi-Tomasi角点检测
goodFeaturesToTrack(g_grayImage, corners, g_maxCornerNumber,
qualityLevel, minDistance, Mat(), blockSize, false, k);
cout << ">此次检测到的角点数量为:" << corners.size() << endl;
int r = 4;
for (unsigned int i = 0; i < corners.size(); i++)
circle(copy, corners[i], r, Scalar(g_rng.uniform(0, 255),
g_rng.uniform(0, 255), g_rng.uniform(0, 255)), -1, 8, 0);
imshow(WINDOW_NAME, copy);
}
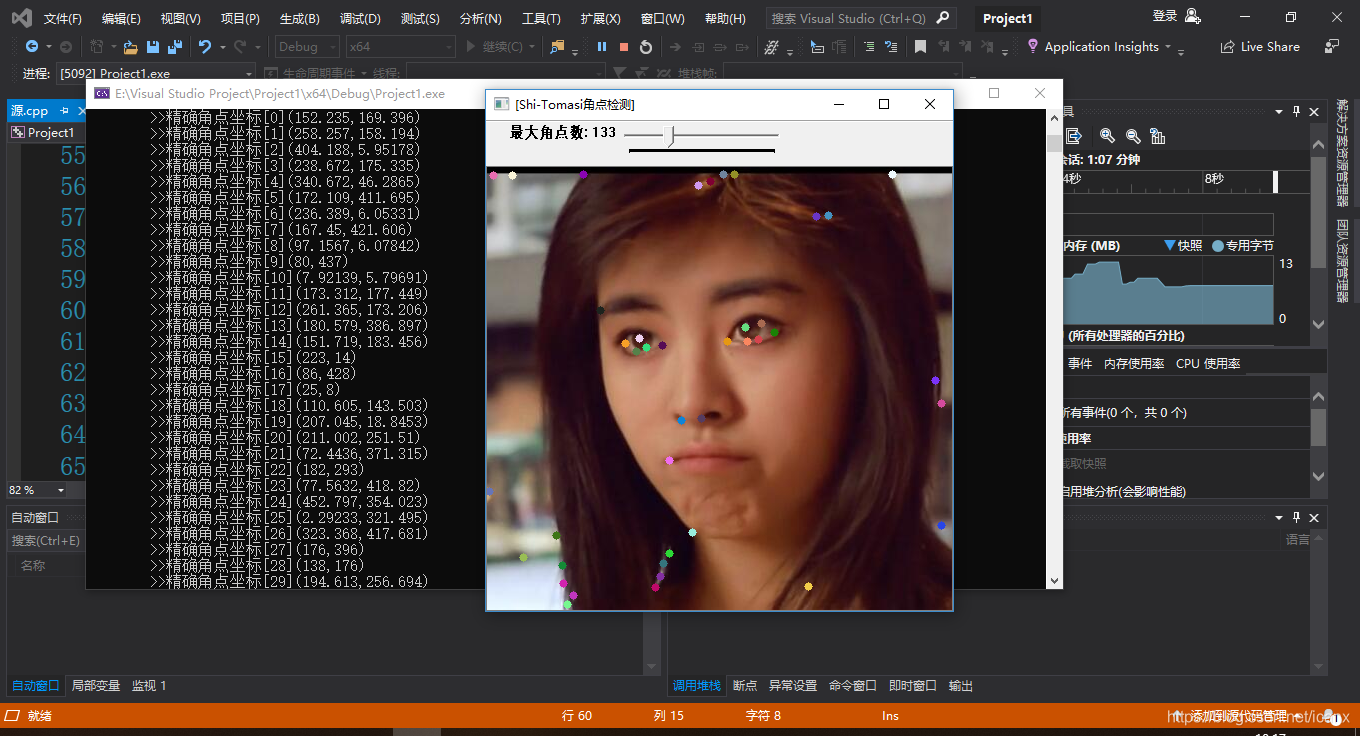
亚像素级角点检测
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
#define WINDOW_NAME "[Shi-Tomasi角点检测]"
Mat g_srcImage,g_grayImage;
int g_maxCornerNumber = 33;
int g_maxTrackbarNumber = 500;
RNG g_rng(12345);
void on_GoodFeaturesToTrack(int, void*);
int main()
{
g_srcImage = imread("2.jpg", 1);
if (!g_srcImage.data) {
printf("fail to load image!");
return -1;
}
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME, WINDOW_AUTOSIZE);
createTrackbar("最大角点数", WINDOW_NAME, &g_maxCornerNumber,
g_maxTrackbarNumber, on_GoodFeaturesToTrack);;
imshow(WINDOW_NAME, g_srcImage);
on_GoodFeaturesToTrack(0,0);
waitKey(0);
return 0;
}
void on_GoodFeaturesToTrack(int, void*)
{
if (g_maxCornerNumber <= 1)
g_maxCornerNumber = 1;
//Shi-Tomasi算法参数准备
vector<Point2f>corners;
double qualityLevel = 0.01;//角点检测可接受的最小特征值
double minDistance = 10;//角点之间的最小距离
int blockSize = 3;//计算导数自相关时指定的领域范围
double k = 0.4;//权重系数
Mat copy = g_srcImage.clone();
//进行Shi-Tomasi角点检测
goodFeaturesToTrack(g_grayImage, corners, g_maxCornerNumber,
qualityLevel, minDistance, Mat(), blockSize, false, k);
cout << ">此次检测到的角点数量为:" << corners.size() << endl;
int r = 4;
for (unsigned int i = 0; i < corners.size(); i++)
circle(copy, corners[i], r, Scalar(g_rng.uniform(0, 255),
g_rng.uniform(0, 255), g_rng.uniform(0, 255)), -1, 8, 0);
imshow(WINDOW_NAME, copy);
//亚像素角点检测的参数设置
Size winSize = Size(5, 5);
Size zeroZone = Size(-1, -1);
TermCriteria criteria = TermCriteria(TermCriteria::EPS +
TermCriteria::MAX_ITER, 40, 0.001);
//计算亚像素角点的位置
cornerSubPix(g_grayImage, corners, winSize, zeroZone, criteria);
//输出角点信息
for (int i = 0; i < corners.size(); i++) {
cout << "\t>>精确角点坐标[" << i << "](" << corners[i].x << ","
<< corners[i].y << ")" << endl;
}
}

















&spm=1001.2101.3001.5002&articleId=90681248&d=1&t=3&u=26cc90596a1649af9ba77d93db066b8b)
 1799
1799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










