



CUDA(Compute Unified Device Architecture)是NVIDIA开发的并行计算平台和编程模型,用于利用NVIDIA GPU的并行计算能力,所以强烈建议使用 NVIDIA(英伟达)显卡(注意这个大坑!!!!!!!)
查看cuda版本
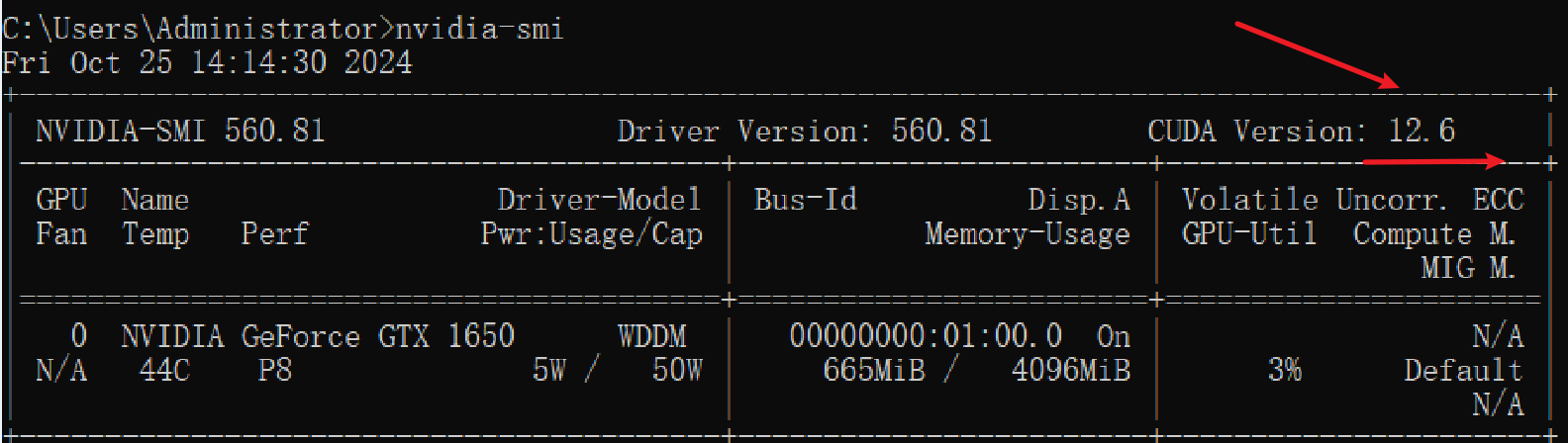
查看NVIDIA(英伟达)显卡驱动 对cuda 的版本
输入命令 nvidia-smi
最高支持的CUDA版本为12.6,CUDA版本向下兼容,所以12.6版本以下的CUDA,都可以选择安装
如果 运行 nvidia-smi 发现命令无效,说明显卡驱动没有安装或者安装错误,可以跳转到安装显卡驱动的链接
下载cuda
视频教程 【手把手教学CUDA安装教程】
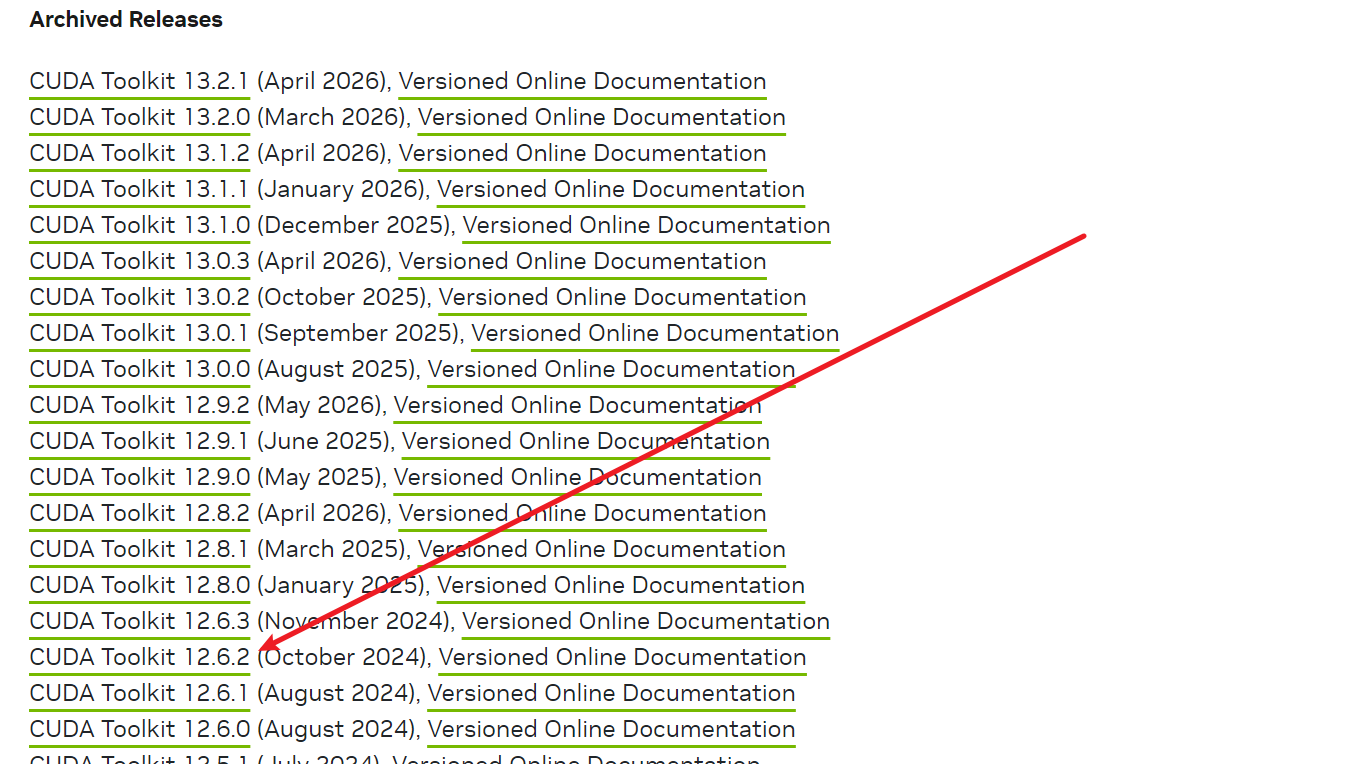
cuda 下载地址 访问 NVIDIA 官网 CUDA Toolkit 下载页,
CUDA Toolkit Archive | NVIDIA Developer![]() https://developer.nvidia.com/cuda-toolkit-archive选择合适的版本,cuda版本选择好了后 你的pytorch版本也就定了,选择之前慎重
https://developer.nvidia.com/cuda-toolkit-archive选择合适的版本,cuda版本选择好了后 你的pytorch版本也就定了,选择之前慎重
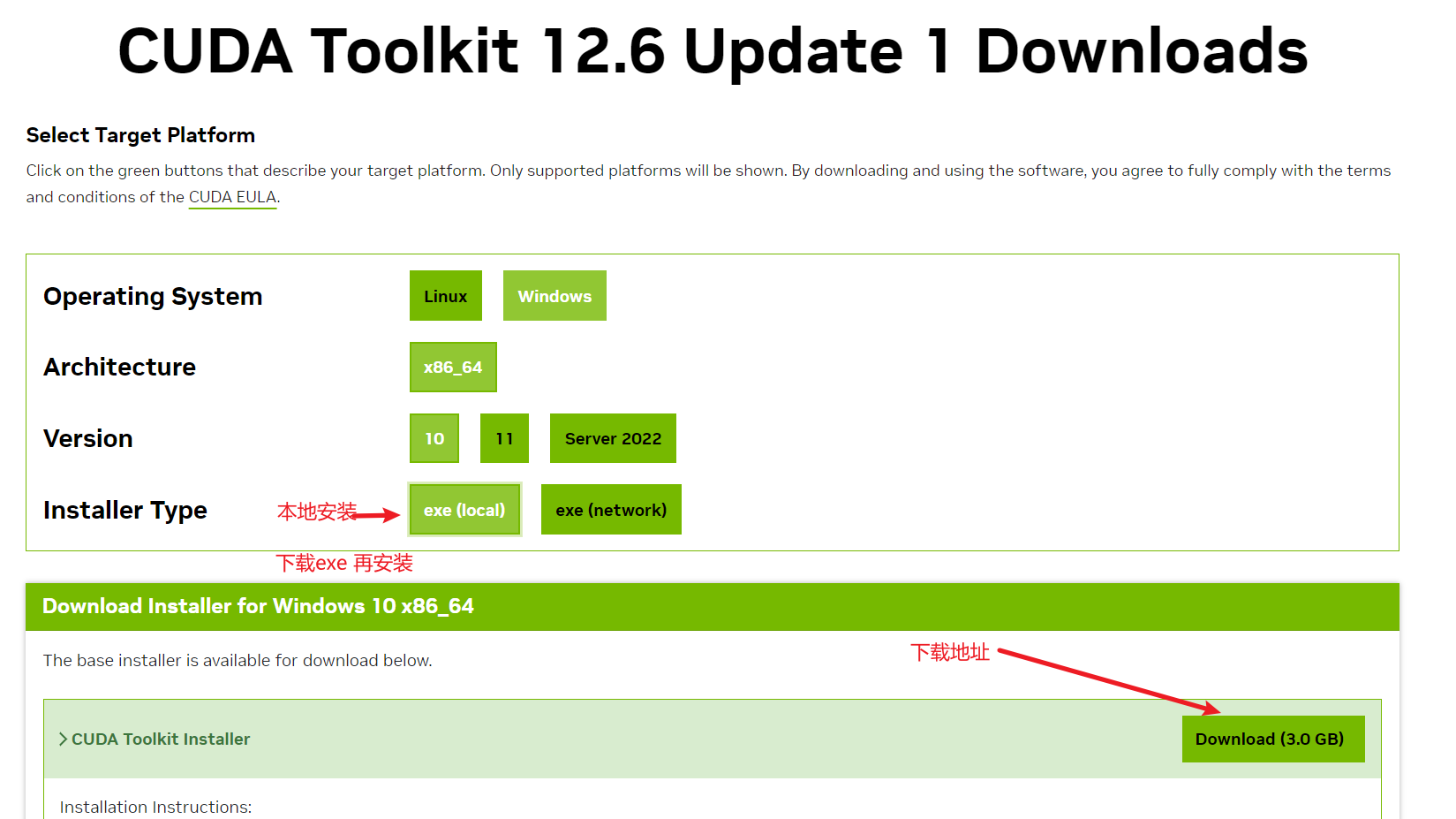
选择 Windows 对应版本,下载 exe 文件 选择安装
pytorch对应的cuda 版本,cuda 安装好了,pytorch版本不对应也用不了cuda,坑!!!!
# ROCM 7.2 (Linux only)
pip install torch==2.11.0 torchvision==0.26.0 torchaudio==2.11.0 --index-url https://download.pytorch.org/whl/rocm7.2
# CUDA 12.6
pip install torch==2.11.0 torchvision==0.26.0 torchaudio==2.11.0 --index-url https://download.pytorch.org/whl/cu126
# CUDA 12.8
pip install torch==2.11.0 torchvision==0.26.0 torchaudio==2.11.0 --index-url https://download.pytorch.org/whl/cu128
# CUDA 13.0
pip install torch==2.11.0 torchvision==0.26.0 torchaudio==2.11.0 --index-url https://download.pytorch.org/whl/cu130
# CPU only
pip install torch==2.11.0 torchvision==0.26.0 torchaudio==2.11.0 --index-url https://download.pytorch.org/whl/cpu
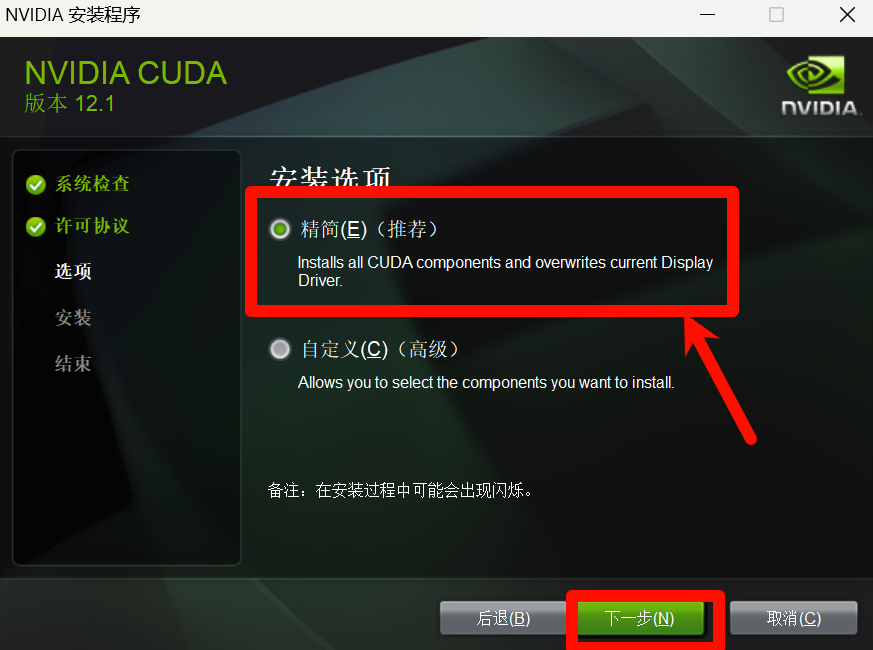
安装cuda
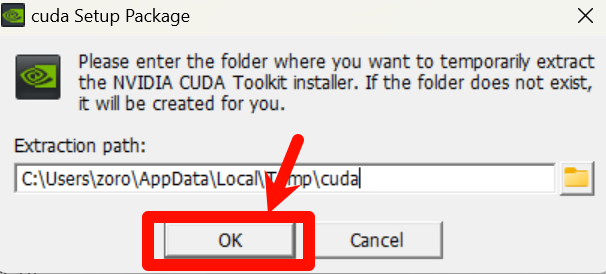
选择精简安装
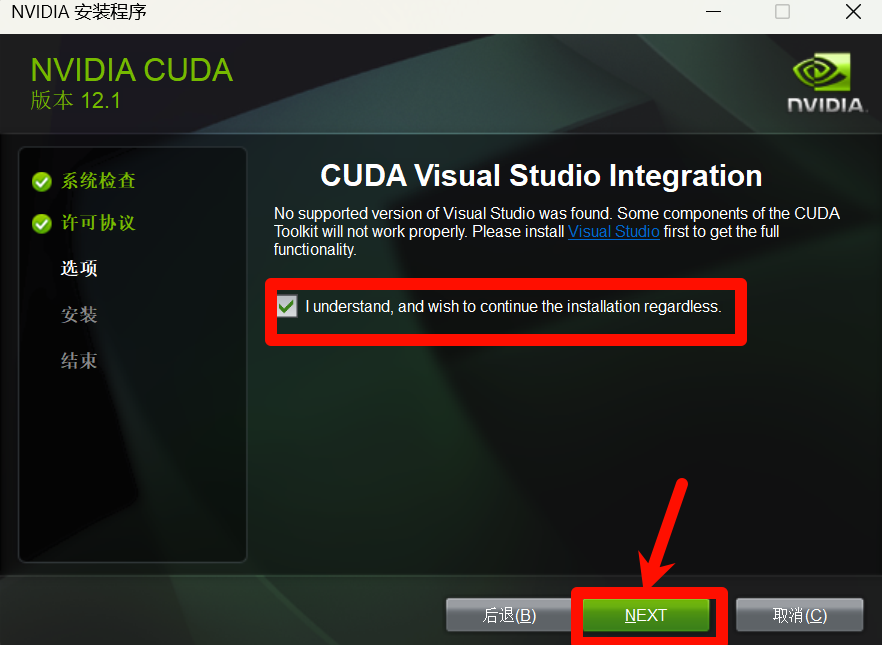
点击复选框, I understand and wish to continue the installation regardless(我理解并希望继续进行安装)
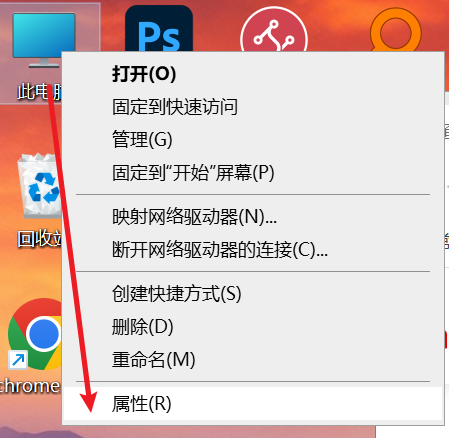
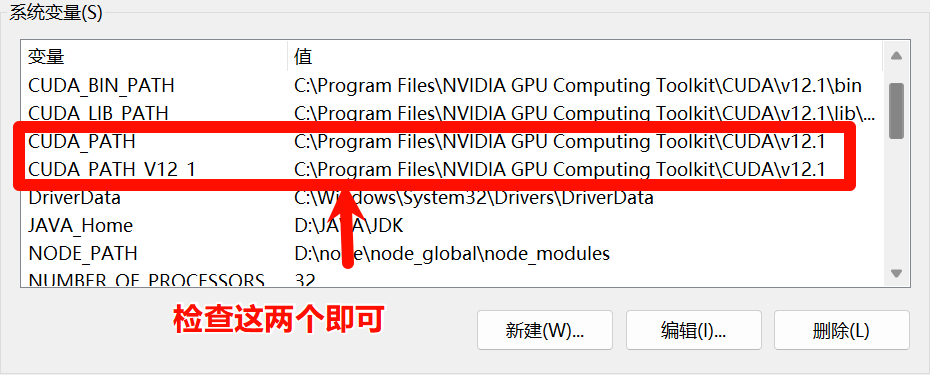
安装 完毕 查看环境变量,在环境变量中 会出现cuda 的安装路径
右键“此电脑”选属性,
点“高级系统设置”,

再点“环境变量”按钮,
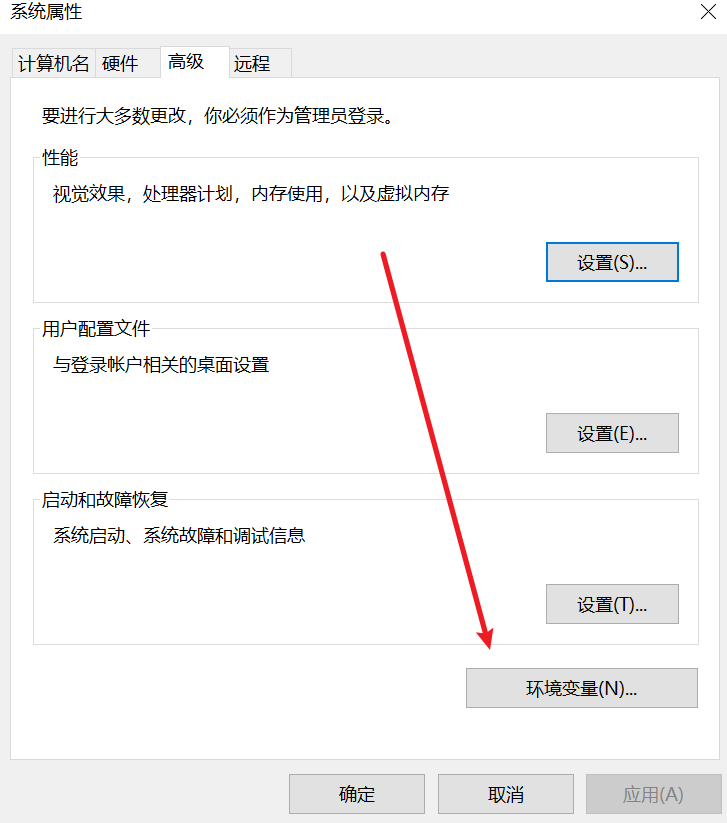
这里能分用户和系统变量查看 。
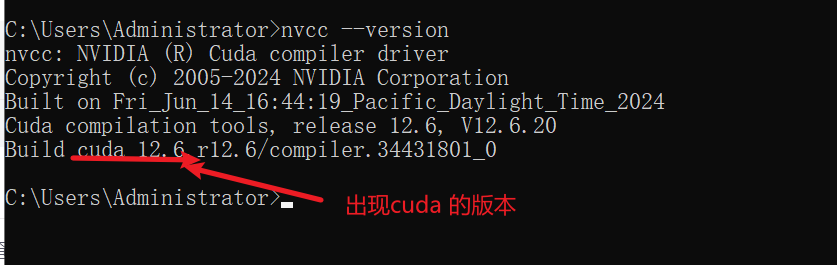
检测cuda
检验 cuda是否安装成功
nvcc --version 出现cuda 安装的版本说明成功
安装cuDNN
CUDA提供了通用的并行计算平台和编程模型,而cuDNN则是针对AI模型用进行了优化的GPU加速库,二者结合起来可以实现高效的AI模型训练和推理。
根据cuda 的版本选择cuDNN的版本,这个是坑!!!!!
https://developer.nvidia.com/rdp/cudnn-archive![]() https://developer.nvidia.com/rdp/cudnn-archive
https://developer.nvidia.com/rdp/cudnn-archive
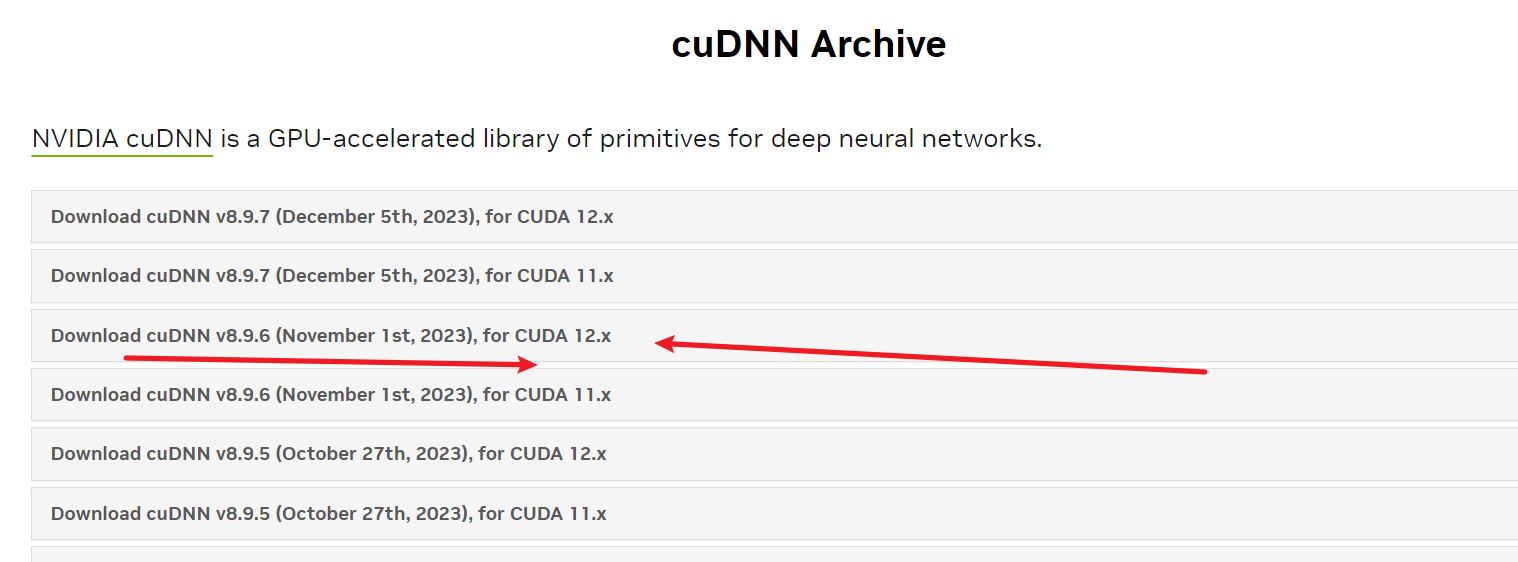
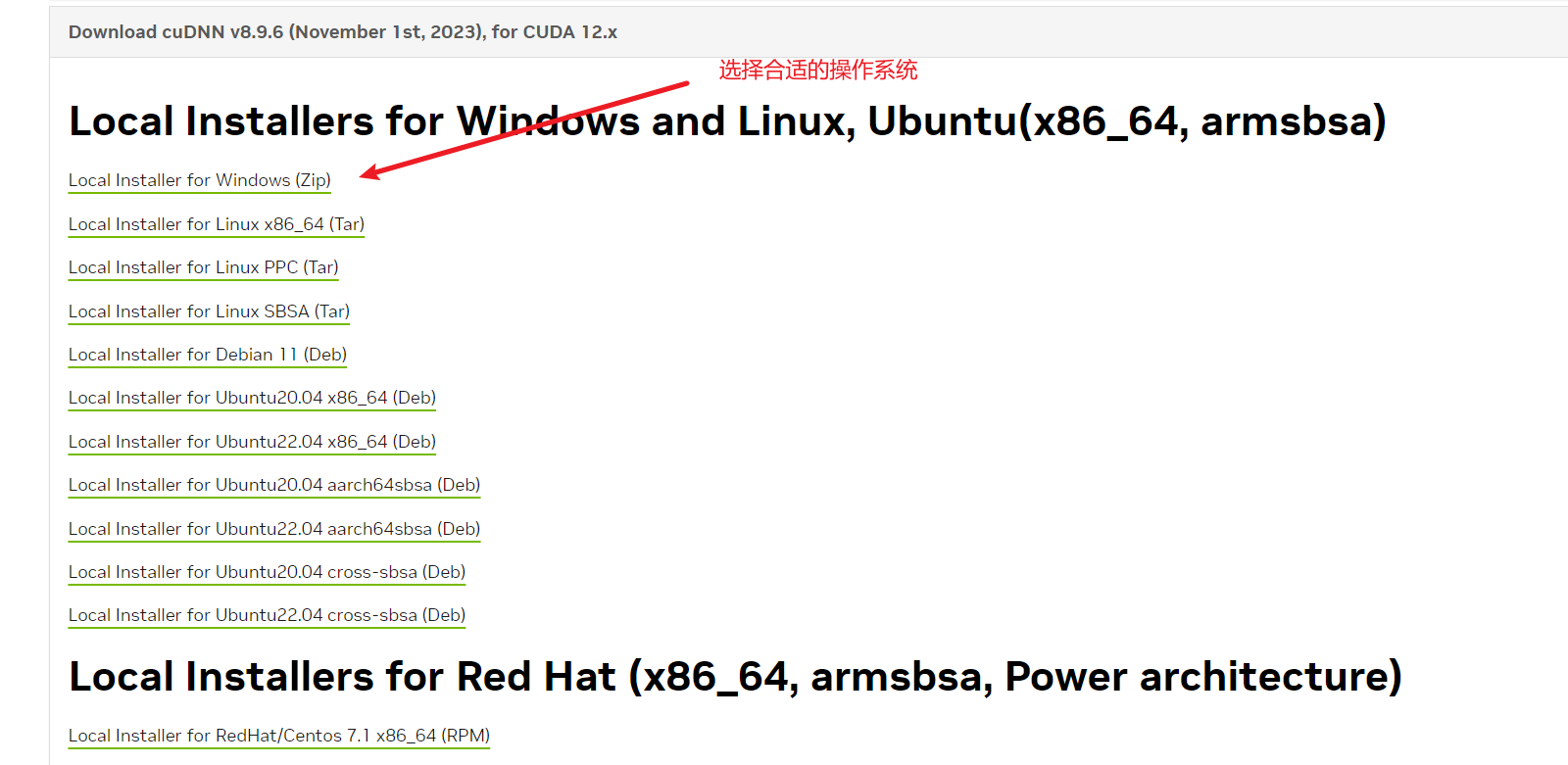
下载cuDNN
点击对应的版本,选择合适的操作系统
输入email
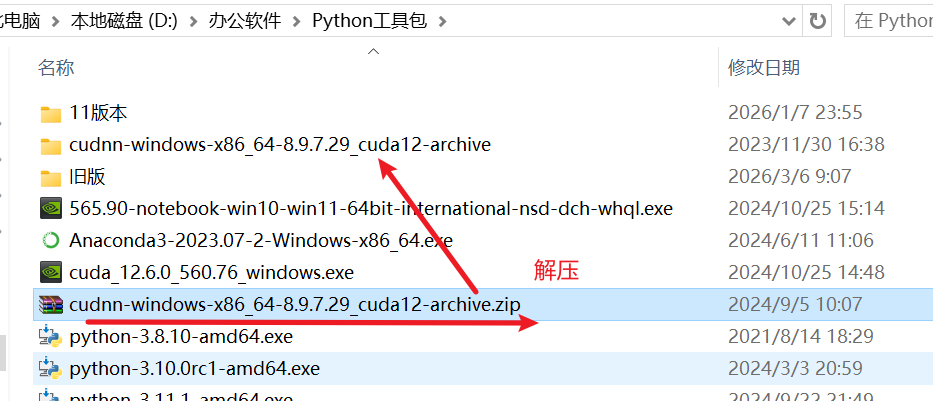
解压cuDNN
下载文件,并且解压
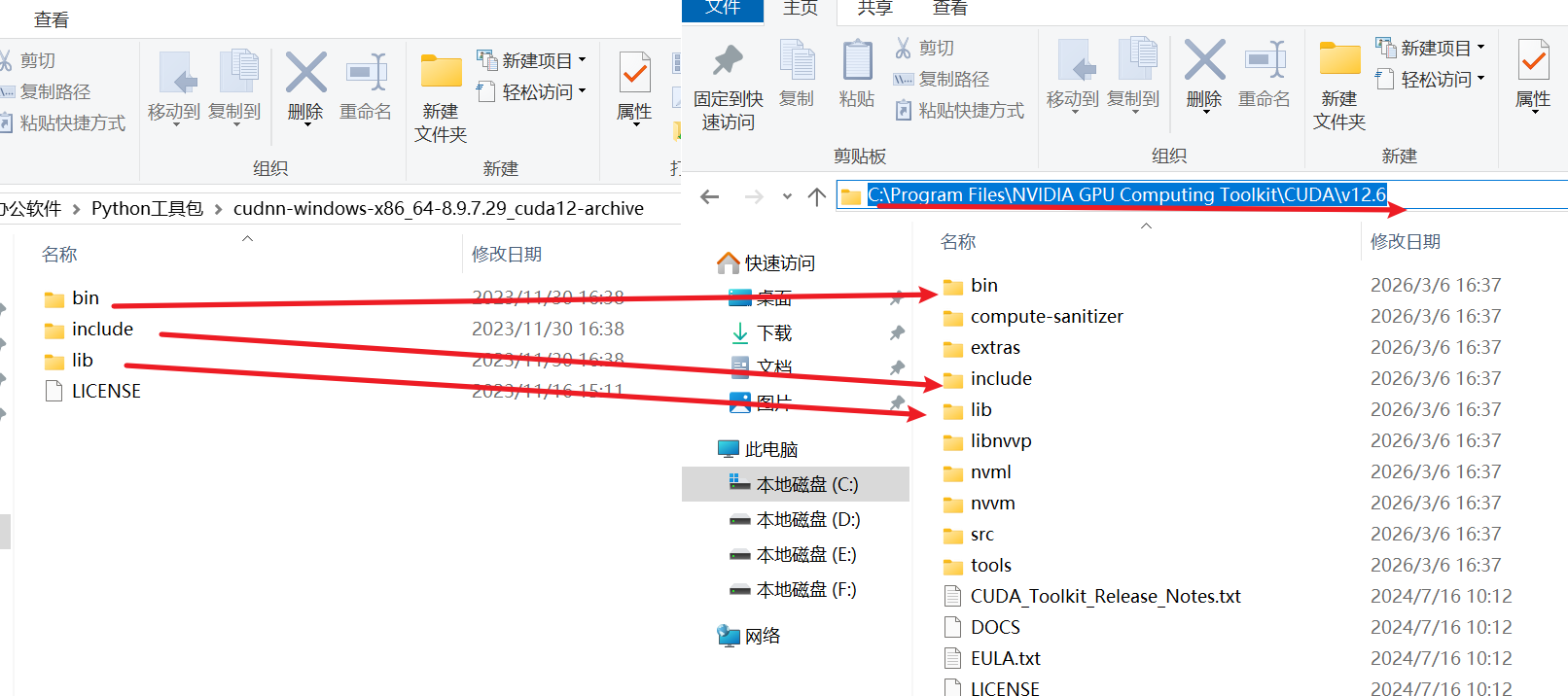
替换文件
 检查cuDNN
检查cuDNN
在 C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v12.6\extras\demo_suite 打开终端窗口
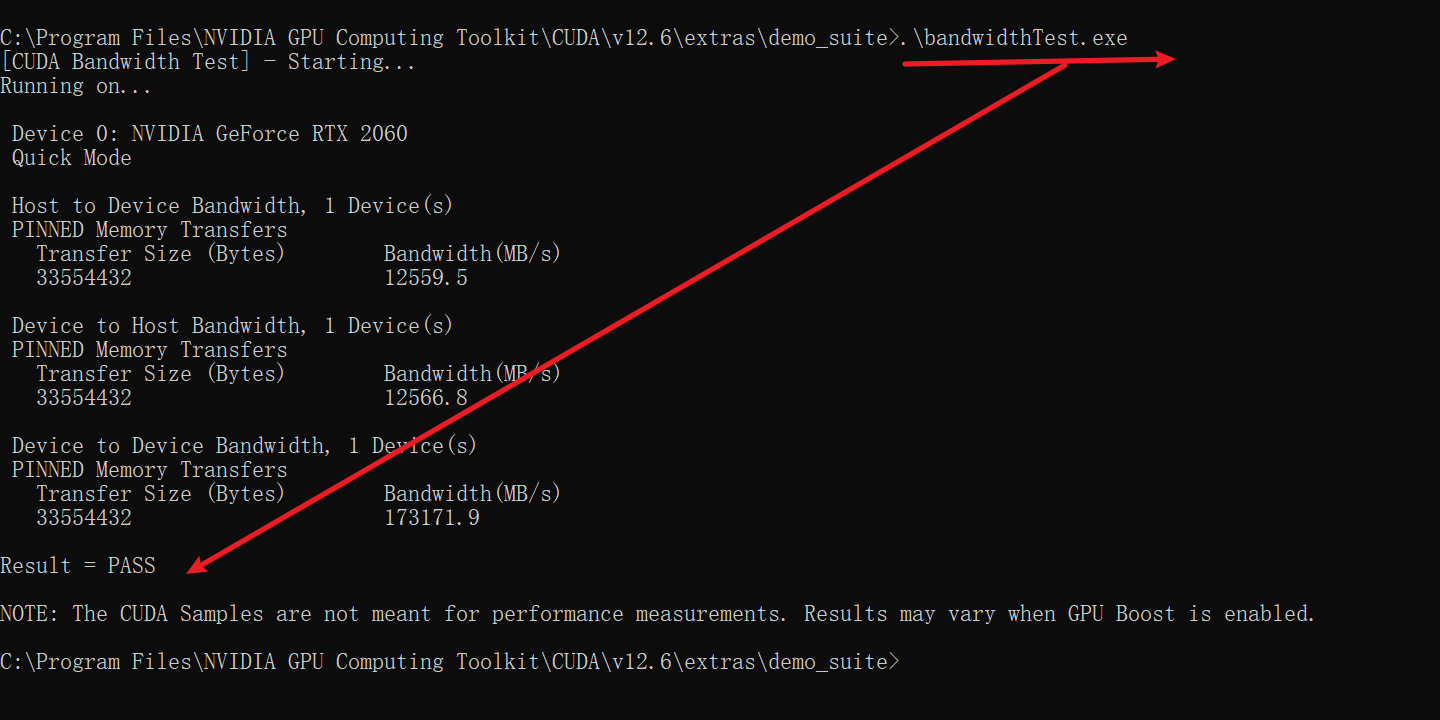
输入命令.\bandwidthTest.exe
出现pass 代表成功


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










