




参考
Eigen3 主页,Eigen3 官网教程
四元数可视化,在三维空间观察四维空间
相关文章
Geometry 几何学
Space transformations 空间转换
旋转,平移,缩放。这些变换不表示为矩阵,但仍然可以和矩阵混合计算。
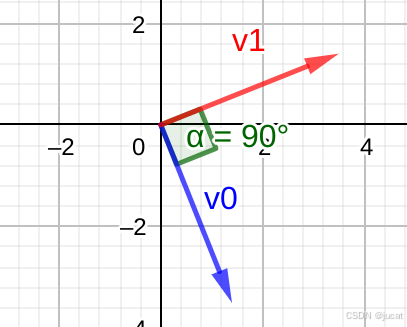
2d旋转
void Test2DRotation()
{
Eigen::Rotation2D<double> rot(M_PI/2);
Eigen::Vector2d v0;
v0 << 1.4, -3.5;
auto v1 = rot * v0;
ROS_INFO_STREAM("after rotation, v1:" << std::endl << v1);
}
3d 旋转
-
右手坐标系和左手坐标系
不管是右手坐标系,还是左手坐标系,从大拇指到中指的顺序都是 X 轴,Y 轴,Z 轴的正方向!

-
内旋,外旋
绕着自身外的固定轴旋转,称为外旋。
绕着自身旋转,称为内旋。
旋转方向:
右手大拇指朝向旋转轴的正方向,其余 4 个手指握住,其他手指的朝向为旋转角度的正方向。
下图中以右手坐标系的 Z 轴为例,从 x 轴正方向转向 y 轴正方向的角度为正旋转角度。

-
欧拉角
欧拉角不是描述一个静态的姿态角,而是描述一种旋转的过程!
欧拉角描述把坐标系(一般是右手坐标系)从静态,按照一定顺序把每个轴(一般是 Z,Y,X 轴,也就是 yaw 角,pitch角,roll角)旋转一次。最后一次得到新的姿态。
Urdf 文件中的 <r,p,y> 参数,就是以 Z,Y,X 轴的顺序旋转,描述坐标系的姿态。
假设坐标系 link1 位于坐标系 base_link 上方 1 米位置( base_link 是 link1 的父坐标系):
<robot name="simple_robot">
<link name="base_link"/>
<link name="link1"/>
<joint name="joint1" type="fixed">
<parent link="base_link"/>
<child link="link1"/>
<origin xyz="0 0 1" rpy="0 0 0"/>
</joint>
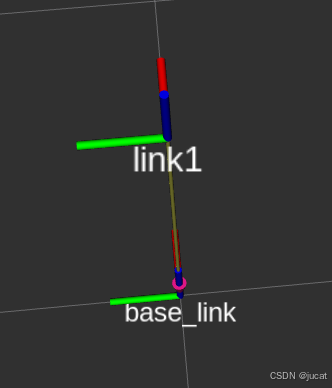
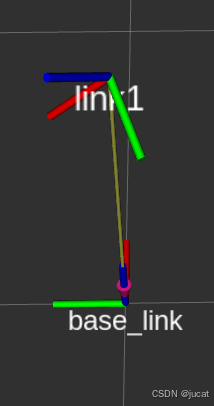
</robot>坐标系关系如下,其中红色是 x 轴正方向,绿色是 y 轴正方向,蓝色是 z 轴正方向。
-
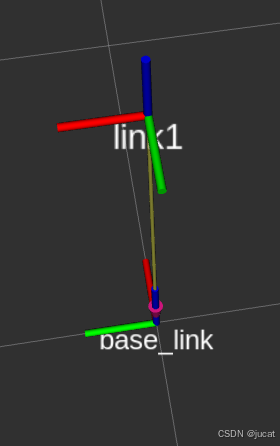
首先,令 link1 的欧拉角 yaw = 1.570796(90°),link1 绕 z 轴(蓝色)逆时针旋转了 90°。
-
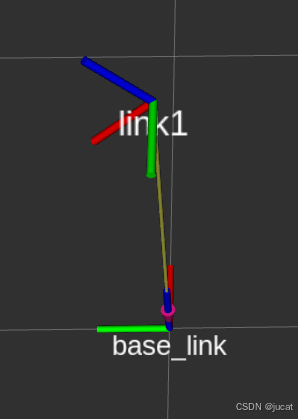
接着令 link1 的欧拉角 pitch = 0.785398(45°) ,link1 绕 y 轴(绿色)逆时针旋转了 45°
-
最后令 link1 的欧拉角 roll = -0.523598(-30°),link1 绕 x 轴(红色)顺时针旋转 30°:
最后的 urdf 文件如下:
<robot name="simple_robot">
<link name="base_link"/>
<link name="link1"/>
<joint name="joint1" type="fixed">
<parent link="base_link"/>
<child link="link1"/>
<origin xyz="0 0 1" rpy="-0.523598 0.785398 1.570796"/>
</joint>
</robot>-
欧拉角的万向锁
万向锁发生在内旋过程中,外旋并不会有这个问题。其次,万向锁影响的是用欧拉角表示连续的旋转过程,所以用欧拉角表示单次旋转后的姿态(静态相对位姿,urdf 描述了静态 tf )是没问题的。
这里搬运一个欧拉角万象锁的例子,个人觉得比较生动。
一个简单直观的例子是炮塔模型。假设地面上的一个炮塔有两个旋转轴:Y垂直于地面,使炮塔可以平行地面360度旋转(正北设为0度);X平行于地面,使炮口可以绕着它上下90度旋转(平行地面使设为0度)。现在,天空中的任意一点就可以使用两个坐标的度数来表示了!
这时,一架敌机从正东面飞来,我们转动炮塔对准它,目前的坐标是(10,90)。因为飞机飞行方向不变,所以Y固定为90,而X由于飞机距离的接近而增大。当飞机恰好飞到炮塔顶端时,即X的角度也达到90度时,飞机忽然向南飞行!我们必须立即改变炮塔朝向,否则即将都丢失目标。但是我们发现,无论是转动X轴还是Y轴,我们都无法让炮塔转向南方了,即炮塔在此时丢失了一个自由度!
欧拉角优缺点
优点:简单易懂
缺点:xyz 轴的旋转顺序影响结果;存在万向锁,不适合描述连续旋转;
轴角 Axis-Angle
顾名思义,用一个旋转轴和旋转角度来描述三维物体围绕轴体旋转的过程。采用右手坐标系,大拇指方向为旋转轴正方向,四指握住的方向为旋转的正方向。
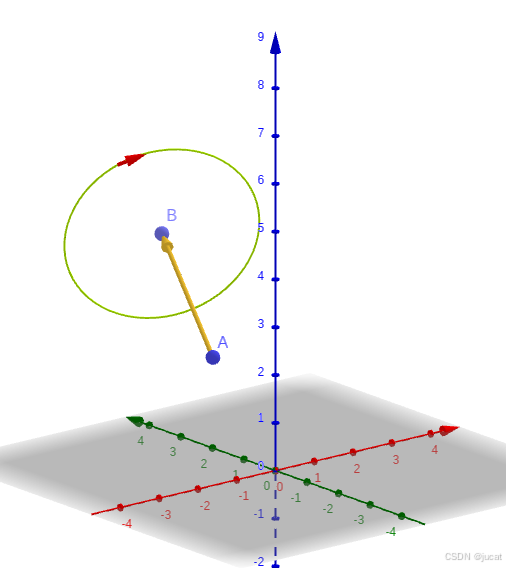
下图中,空间中点 A 和 B 确定了一个三维向量作为旋转轴,轴体正方向定义为 A 指向 B,那么从 A 向 B 的方向观察,顺时针为旋转的正方向。
void Test3DAngleAxisRotation()
{
Eigen::Vector3d axis(0.5, 1.5, -1.0);
double angle = M_PI / 6;
Eigen::AngleAxisd angle_axis0(angle, axis);
Eigen::Matrix3d rotationMatrix0 = angle_axis0.toRotationMatrix();
Eigen::Vector3d p0(1.0, -0.5, 0.5);
ROS_INFO_STREAM("after rotation, p0:" << std::endl << rotationMatrix0*p0);
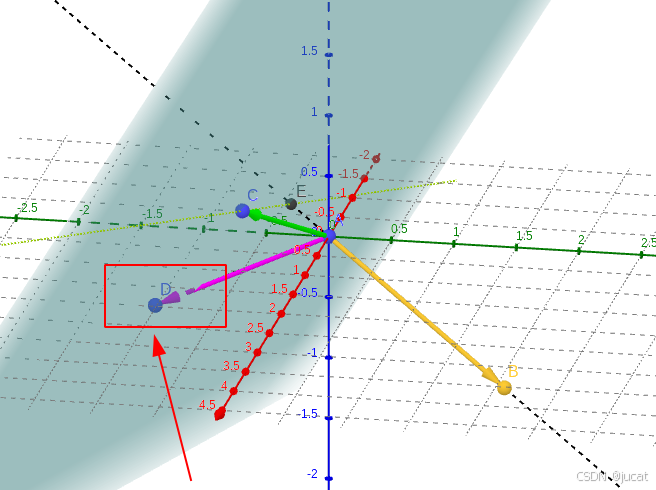
}效果如下:黄色向量 AB 是旋转轴,绿色向量 AC 是 p0 向量,紫色向量 AD 是旋转后的向量。
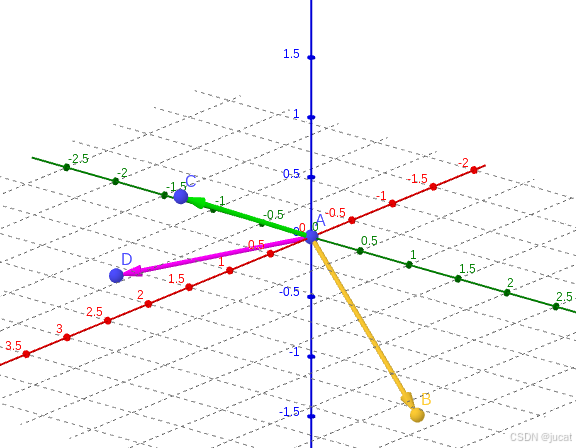
按照定义,向量 p0 的起点 A 和终点 C 应该分别在其垂直于旋转轴的平面内旋转 angle 角度,也就是向量 AC 和向量 AD 的起点,终点共面,且该面垂直与旋转轴。
这里旋转前后的向量起点相同,只要观察旋转后的终点即可。
过点 C 垂直于向量 AB ,相交与点 E,E 点就是垂足。
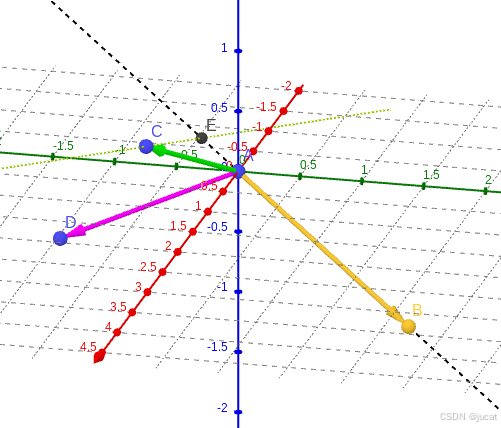
然后过点 E 垂直于向量 AB 得到垂直平面,下图中蓝灰色所示。可以看到左下角中旋转后的向量 AD 是穿过平面了。
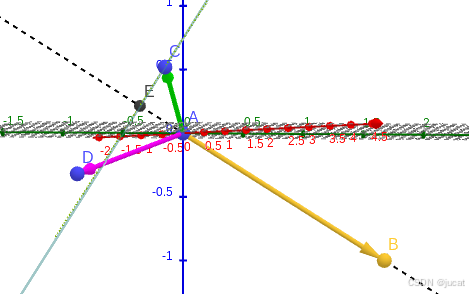
换个角度看的更清楚。
出现这种问题,首先想到的就是旋转轴的轴体不是单位向量。下面测试单位向量的旋转轴效果。
void Test3DAngleAxisRotation()
{
Eigen::Vector3d axis(0.5, 1.5, -1.0);
double angle = M_PI / 6;
Eigen::AngleAxisd angle_axis0(angle, axis);
Eigen::Matrix3d rotationMatrix0 = angle_axis0.toRotationMatrix();
Eigen::Vector3d p0(1.0, -0.5, 0.5);
ROS_INFO_STREAM("angle axit without normalized:" << axis << std::endl <<
"after rotation, p0:" << std::endl << rotationMatrix0*p0);
Eigen::AngleAxisd angle_axis1(angle, axis.normalized());
Eigen::Matrix3d rotationMatrix1 = angle_axis1.toRotationMatrix();
ROS_INFO_STREAM("angle axit with normalized:" << axis.normalized() << std::endl <<
"after rotation, p0:" << std::endl << rotationMatrix1*p0);
}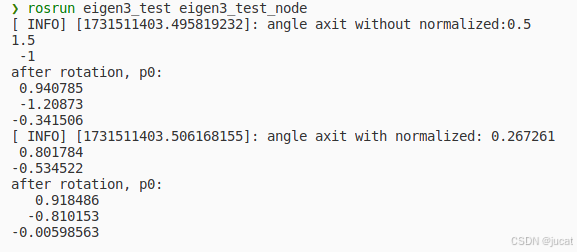
经过单位化后得到旋转轴 AF,与原来旋转轴 AB 共线,重新计算得到的旋转后向量 AH,H 和旋转前向量 AC 的终点 C 终于共面了!
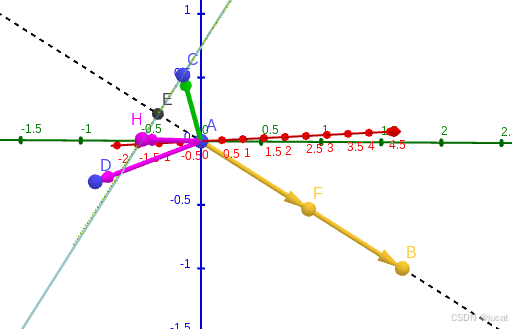
所以,eigen3 中,轴角的使用必须让旋转轴轴体单位化,不然计算结果可能有误!
四元数
复数由一个实数加上一个虚数组成,其中虚数单位 。
四元数由一个实数加上三个虚数 i,j,k 构成,表示为实数和 i,j,k 的线性组合:
其中 。
只有单位四元数才能够表示旋转。即 。
大佬 3Blue1Brown 用球极投影可视化了四元数旋转过程,相关视频适合反复观看,细细品味。
欧拉角和四元数之间的转换,四元数的旋转
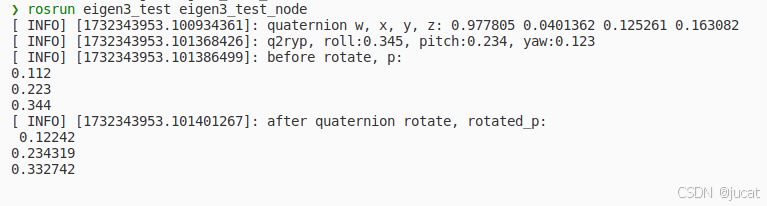
void Test3DQuaternion()
{
double roll = 0.123, pitch = 0.234, yaw = 0.345;
Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitX());
Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitY());
Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitZ());
Eigen::Quaterniond q = yawAngle * pitchAngle * rollAngle; // 按 yaw,pitch,roll 顺序旋转
ROS_INFO_STREAM("quaternion w, x, y, z: " << q.w() << " " << q.x() << " " << q.y() << " " << q.z());
Eigen::Matrix3d rotationMatrix = q.toRotationMatrix();
Eigen::Vector3d euler = rotationMatrix.eulerAngles(2, 1, 0);
ROS_INFO_STREAM("q2ryp, roll:" << euler[0] << ", pitch:" << euler[1] << ", yaw:" << euler[2]);
// 四元数旋转
Eigen::Vector3d p (0.112, 0.223, 0.344);
ROS_INFO_STREAM("before rotate, p:" << std::endl << p);
Eigen::Quaterniond p_quaternion(0, p[0], p[1], p[2]); // 需要把点转为四元数格式
Eigen::Quaterniond rotated_p_quaternion = q * p_quaternion * q.conjugate();
Eigen::Vector3d rotated_p(rotated_p_quaternion.x(), rotated_p_quaternion.y(), rotated_p_quaternion.z());
ROS_INFO_STREAM("after quaternion rotate, rotated_p:" << std::endl << rotated_p);
}

















&spm=1001.2101.3001.5002&articleId=144016646&d=1&t=3&u=9c891e8009e5420ea2131c1a9fa00442)
 2940
2940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










