




比较联机游戏不同玩家数量时的,卡顿概率。
比如六人联机卡顿概率是三人联机的几倍(其实这是我思考这个问题的出发点。
问题简化:
假设一个玩家网络卡顿的概率为p, 且0<=p<=1。
那么n个玩家联机打一局游戏,遇到卡顿的概率是多少?
说明1:只要有一个玩家卡顿就算这局游戏卡顿。
说明2: n>=2,因为一人单机不用联网。
分析与求解
直接去计算卡顿是很麻烦的,
因为要考虑多种情况:
- 1个玩家卡顿
- 2个玩家卡顿
… - n个玩家卡顿
正难则反
我们从该问题的反向情况思考,
即没有玩家卡顿的概率是多少,再用1一减。
那么就很简单,一个玩家不卡顿的概率是1−p1-p1−p,
n个玩家都不卡顿的概率是(1−p)n(1-p)^n(1−p)n
所以遇到卡顿的概率如下
P=1−(1−p)nP = 1 - (1-p)^nP=1−(1−p)n
这个展开写的话,有点麻烦了,就不详细展开了。
接下来我们要探究的是不同人数的卡顿概率问题
深入探究
总体数据变化
对于固定的n,这个最终结果受到变量p的影响。
把这个写成函数形式如下
Pn(p)=1−(1−p)nP_n(p) = 1 - (1-p)^nPn(p)=1−(1−p)n
那么n取2,3,4,5,6时,对应的函数如下
P2(p)=1−(1−p)2P3(p)=1−(1−p)3P4(p)=1−(1−p)4P5(p)=1−(1−p)5P6(p)=1−(1−p)6
P_2(p) = 1 - (1-p)^2\\
P_3(p) = 1 - (1-p)^3\\
P_4(p) = 1 - (1-p)^4\\
P_5(p) = 1 - (1-p)^5\\
P_6(p) = 1 - (1-p)^6\\
P2(p)=1−(1−p)2P3(p)=1−(1−p)3P4(p)=1−(1−p)4P5(p)=1−(1−p)5P6(p)=1−(1−p)6
我们首先看下,n在这些值时,
PnP_nPn与变量p的变化关系。
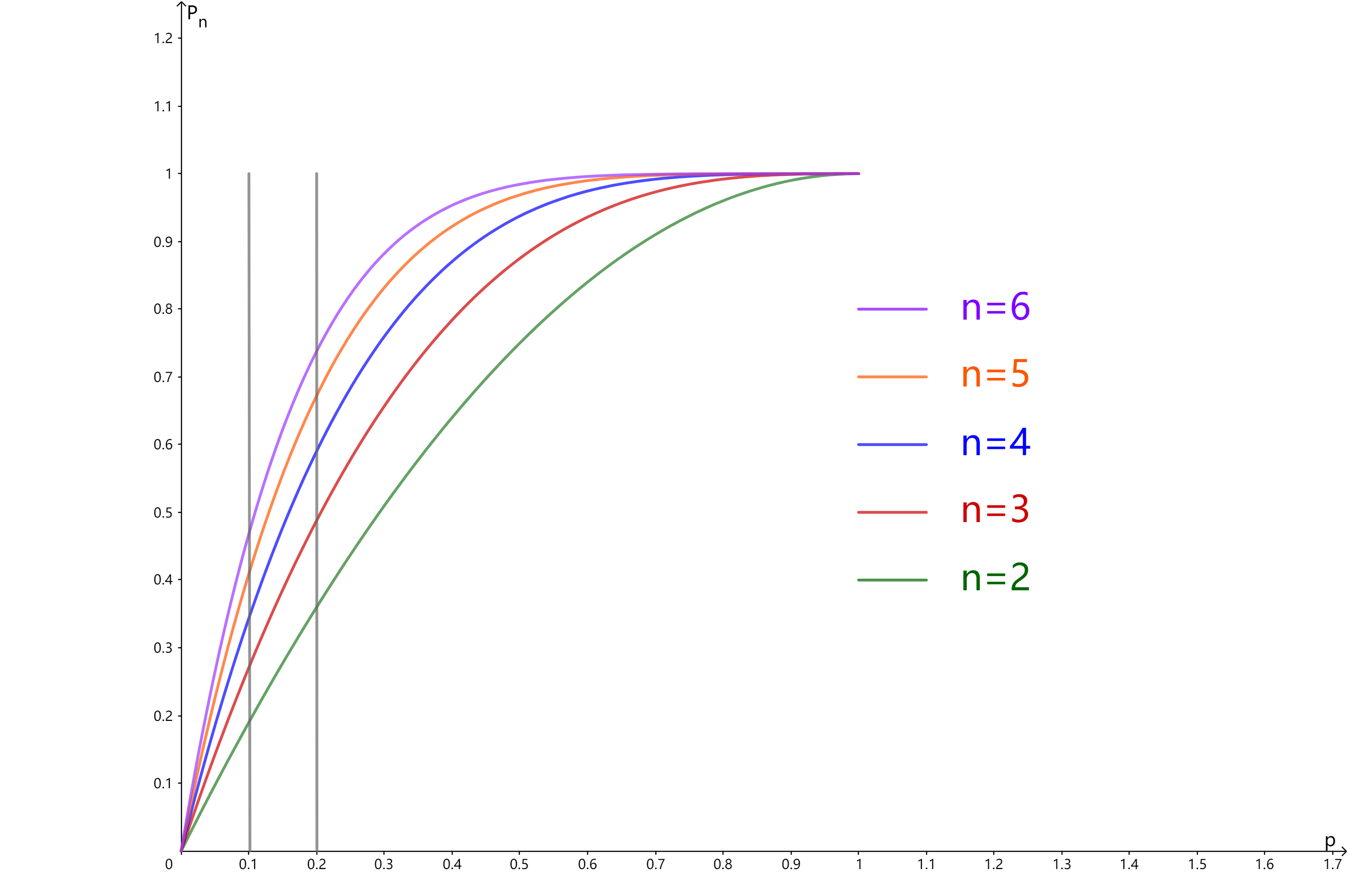
不同n值的差别在p比较小的时候很明显,但是差距好像也不是很大,起码比我预想中的要小。
以p=0.1为例,
P2=0.19P3=0.27P4=0.34P5=0.41P6=0.47 P_2 = 0.19 \\ P_3 = 0.27 \\ P_4 = 0.34 \\ P_5 = 0.41 \\ P_6 = 0.47 P2=0.19P3=0.27P4=0.34P5=0.41P6=0.47
P6P_6P6约是P2P_2P2的2.5倍左右
不过数据比例关系在这个图中感觉还是不够直观,尤其是p<0.1时,太小看不清。
6v3
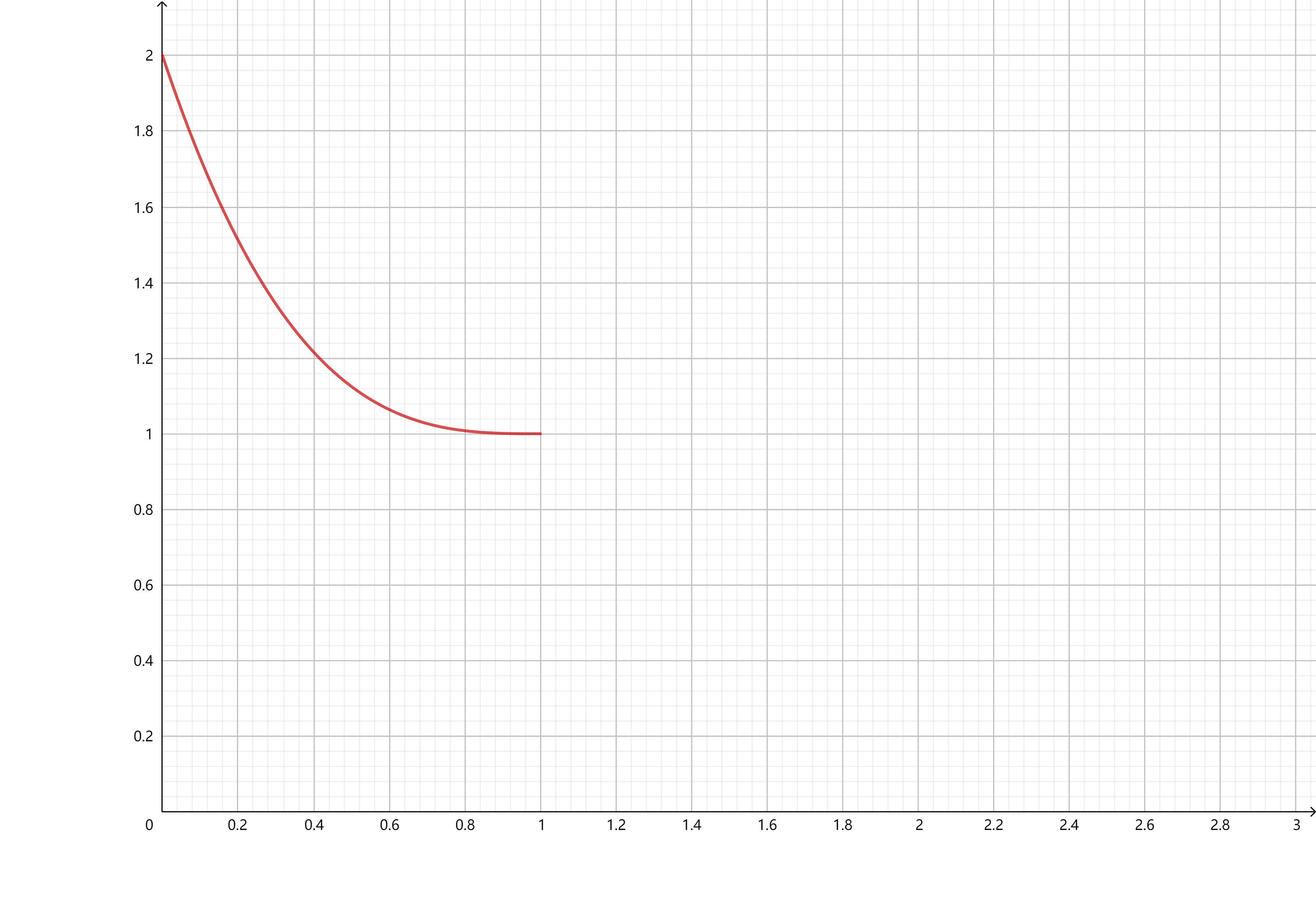
下面专门来看看六玩家卡顿概率是三玩家卡顿概率的多少倍。
M6−3=P6(p)P3(p)=1−(1−p)61−(1−p)3=(1−(1−p)3)(1+(1−p)3)1−(1−p)3平方差公式=(1+(1−p)3) \begin{aligned} M_{6-3} &= \frac {P_6(p)} {P_3(p)} = \frac {1 - (1-p)^6} {1 - (1-p)^3} \\ &= \frac {(1 - (1-p)^3)(1 + (1-p)^3)} {1 - (1-p)^3} &\text{平方差公式}\\ &= (1 + (1-p)^3) \end{aligned} M6−3=P3(p)P6(p)=1−(1−p)31−(1−p)6=1−(1−p)3(1−(1−p)3)(1+(1−p)3)=(1+(1−p)3)平方差公式
由于0<p<1,所以
这个倍数关系范围在1-2之间,
具体如下图
6v2
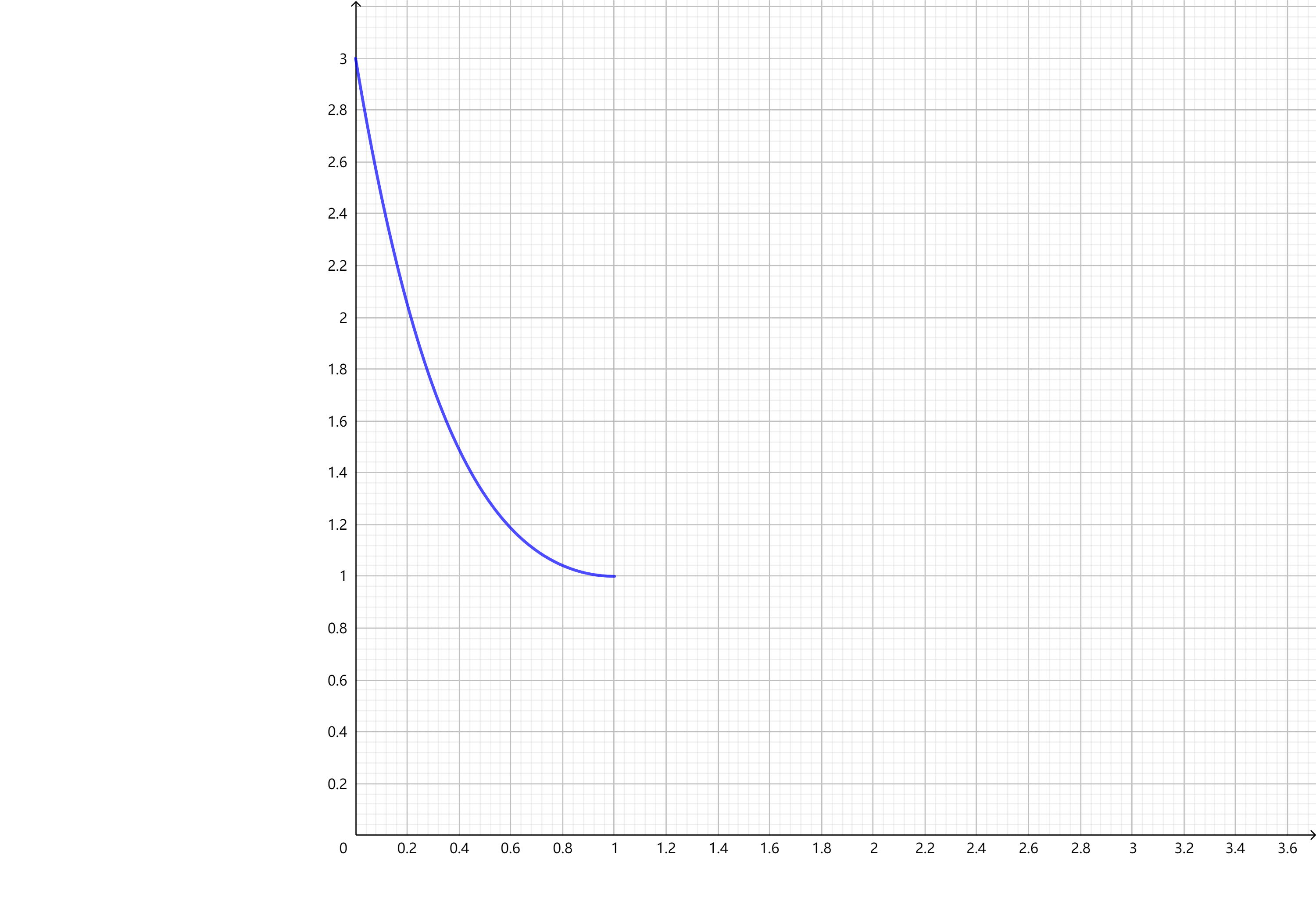
再来看看六玩家卡顿概率是二玩家卡顿概率的多少倍。
M6−2=P6(p)P2(p)=1−(1−p)61−(1−p)2=(1−(1−p)2)(1+(1−p)2+(1−p)4)1−(1−p)2立方差公式=1+(1−p)2+(1−p)4
\begin{aligned}
M_{6-2} &= \frac {P_6(p)} {P_2(p)} =
\frac {1 - (1-p)^6} {1 - (1-p)^2}\\
&= \frac {(1 - (1-p)^2)(1 + (1-p)^2 + (1-p)^4 )} {1 - (1-p)^2} &\text{立方差公式} \\
&= 1 + (1-p)^2 + (1-p)^4
\end{aligned}
M6−2=P2(p)P6(p)=1−(1−p)21−(1−p)6=1−(1−p)2(1−(1−p)2)(1+(1−p)2+(1−p)4)=1+(1−p)2+(1−p)4立方差公式
由于0<p<1,所以
这个倍数关系范围在1-3之间,
其图像如下
结论
- 6玩家卡顿概率,最多是3玩家卡顿概率的两倍
- 6玩家卡顿概率,最多是2玩家卡顿概率的3倍
由于p=0时,P都为0, 所以实际上最大值达不到。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










