



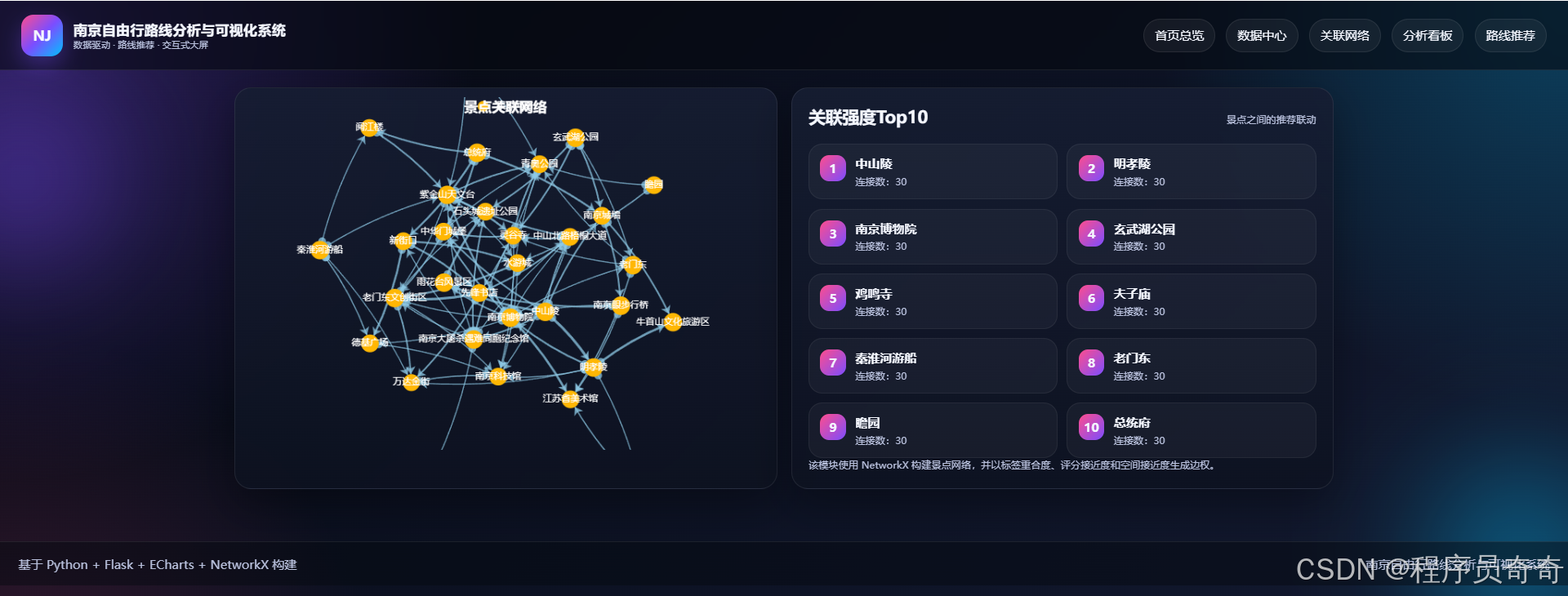
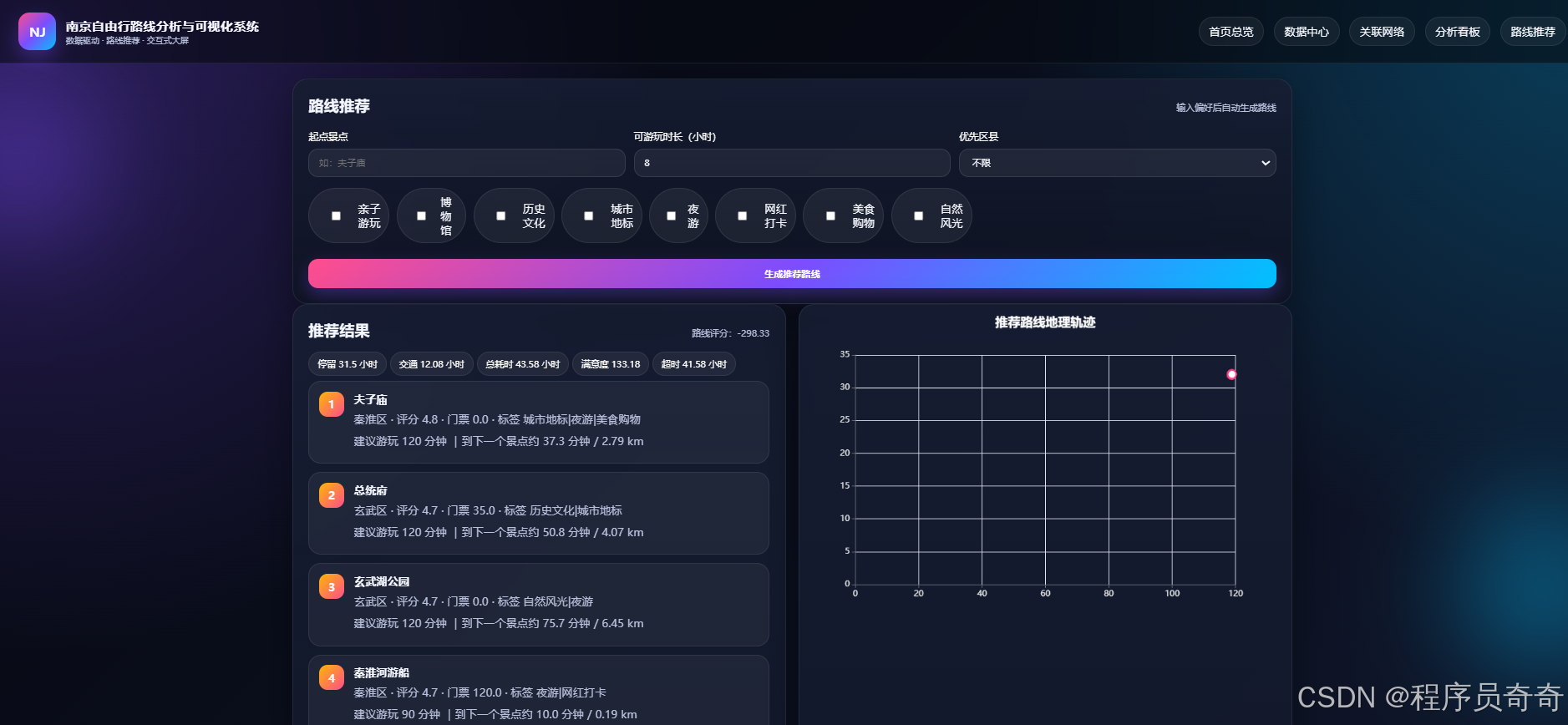
本系统基于 Python 技术栈构建,采用 Flask 作为后端框架,结合 NetworkX 图分析算法与遗传算法,实现南京自由行路线的智能规划与可视化展示。系统通过数据爬取(或自动生成)获取景点评分、热度、开放时间及用户评价等多源数据,经过清洗与结构化处理后构建旅游数据集;在此基础上,利用关联网络分析景点间关系,并以时间约束与用户偏好为条件进行多目标路线优化,生成个性化旅游方案。同时,前端集成 ECharts 可视化模块,对景点分布、热门标签、网络结构及推荐路径进行动态展示,支持多页面交互与数据筛选。该系统实现了“数据获取—分析建模—结果优化—可视化呈现”的完整流程,不仅具备较强的实用价值,也为智慧旅游与数据驱动决策提供了有效参考。
系统介绍演示:
https://www.bilibili.com/video/BV1CzSoBdEeH/?pop_share=1&spm_id_from=333.40164.0.0
系统截图






















 1189
1189

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












