




姿态传感器
姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器,通过内嵌的低功耗ARM处理器得到经过温度补偿的三维姿态与方位等数据,比如角速度,加速度,磁数据等。利用基于四元数的三维算法和特殊数据融合技术,实时输出以四元数、欧拉角表示的零漂移三维姿态方位数据。姿态传感器可广泛嵌入到航模无人机,机器人,机械云台,车辆船舶,地面及水下设备,虚拟现实,人体运动分析等需要自主测量三维姿态与方位的产品设备中。
姿态传感器的产品特点:
✔ 灵活的数据输出接口:I2C,SPI, 串口
✔ 高速数据输出率,最高500Hz
✔ 真正的低功耗,实测17mA
✔ 快速的启动稳定时间,0.1秒
✔ 全角度无盲区三维姿态方位数据输出
✔ 多种数据输出选择(欧拉角,四元数,旋转矩阵等)
✔ 高动态响应与长时间稳定性相结合
✔ 复合型Kalman滤波与数据融合,捷联式惯导技术
✔ 输出绝对方向(地球磁场方向)
✔ 可在动态环境下启动
✔ 跌落检测输出,超动态检测输出
✔ 三轴加速度、三轴角速度和三轴磁场强度计高度集成9DOF
✔ 软件开发编程接口,Demo程序
简单来说,姿态传感器就是能获取三维运动信息的传感器。
姿态传感器在电子产品中处处可见,在平衡车和无人机最为常见。在自主移动机器人中,通过姿态传感器能获取机器人的位姿信息是非常关键的,它会影响到机器人的运功规划及运行状态。
接下来正式进入姿态解算的内容。
姿态解算基础知识
参考文章:
坐标系
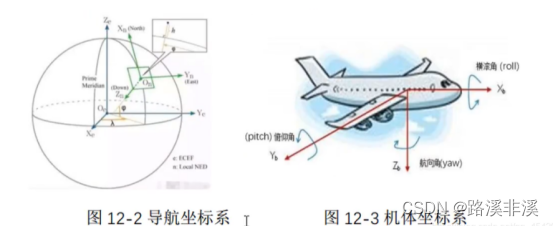
导航坐标系:在多旋翼中,又叫地球坐标系、地理坐标系。通常,采用北东地(NED)构成坐标系的 X、Y、Z轴。
机体坐标系:固联在多旋翼飞行器上,坐标系原点定位于飞行器中心点(假设中心点与重心点重合),X轴指向机头方向,Y轴指向机头的右方,Z轴垂直于X,Y轴构成平面垂直向下,这个可以用“右手定则”确定坐标轴的正方向。
可见,不同的系统中,坐标系的方向可以是不同的。
固连坐标系是随着物体运动的,但是参考坐标系是恒定不动的。
导航坐标系一般是作为参考坐标系。
姿态
姿态通俗的说就是指我们站在地面上观察飞行器的俯仰(pitch)/横滚(roll)/航向(yaw)状态。飞行器需要实时知道当前自己的姿态,才能够根据需要操控其接下来的动作,例如保持平稳,翻滚。
记住这几个单词:




















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










