




 本文介绍了如何在Ubuntu18.04上安装并使用KDevelop创建项目,详细步骤包括安装KDevelop、新建项目、配置CMakeLists.txt和编写Eigen矩阵操作程序。此外,还展示了如何安装Eigen库,并通过示例代码展示了Eigen的矩阵运算、向量乘法、特征值计算等功能。最后,文章详述了如何配置启动器并运行程序,以及程序运行的结果。
本文介绍了如何在Ubuntu18.04上安装并使用KDevelop创建项目,详细步骤包括安装KDevelop、新建项目、配置CMakeLists.txt和编写Eigen矩阵操作程序。此外,还展示了如何安装Eigen库,并通过示例代码展示了Eigen的矩阵运算、向量乘法、特征值计算等功能。最后,文章详述了如何配置启动器并运行程序,以及程序运行的结果。
视觉SLAM十四讲 ch3 Ubuntu18.04 KDevelop的使用及Eigen实践 入门笔记
一、创建KDevelop项目
你的电脑上如果还没有安装kdevelop,请输入下列命令进行安装:
sudo apt-get install kdevelop
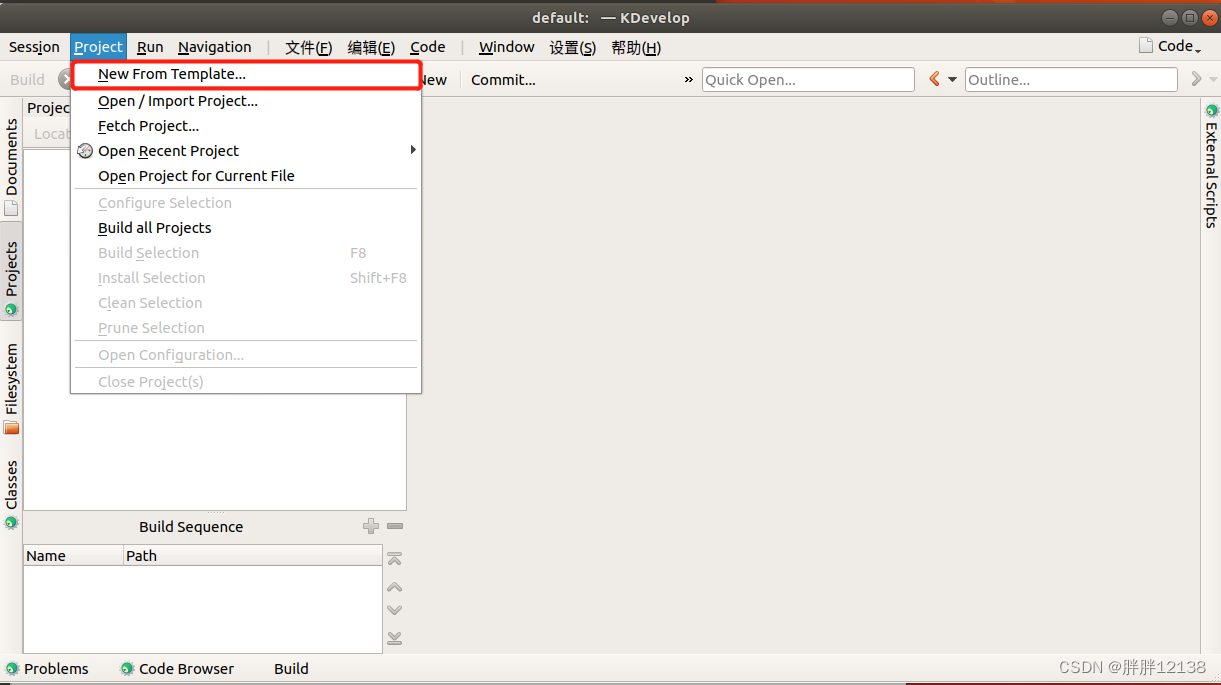
1.1 打开KDevelop,菜单栏Project->New From Template
1.2 选择Standard创建项目,这里以老师项目useEigen为例创建如下图
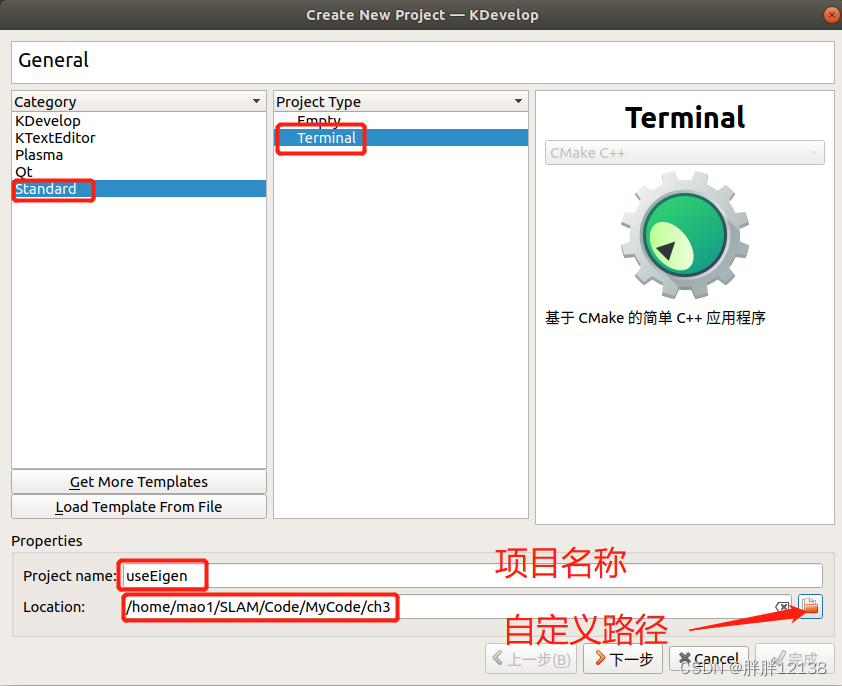
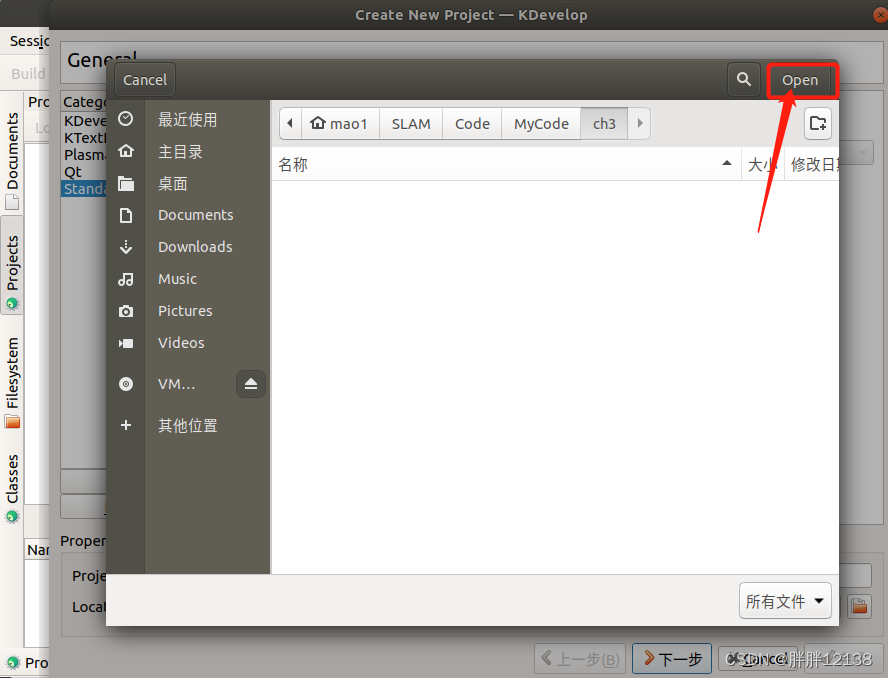
路径选择之后点击右上角的open
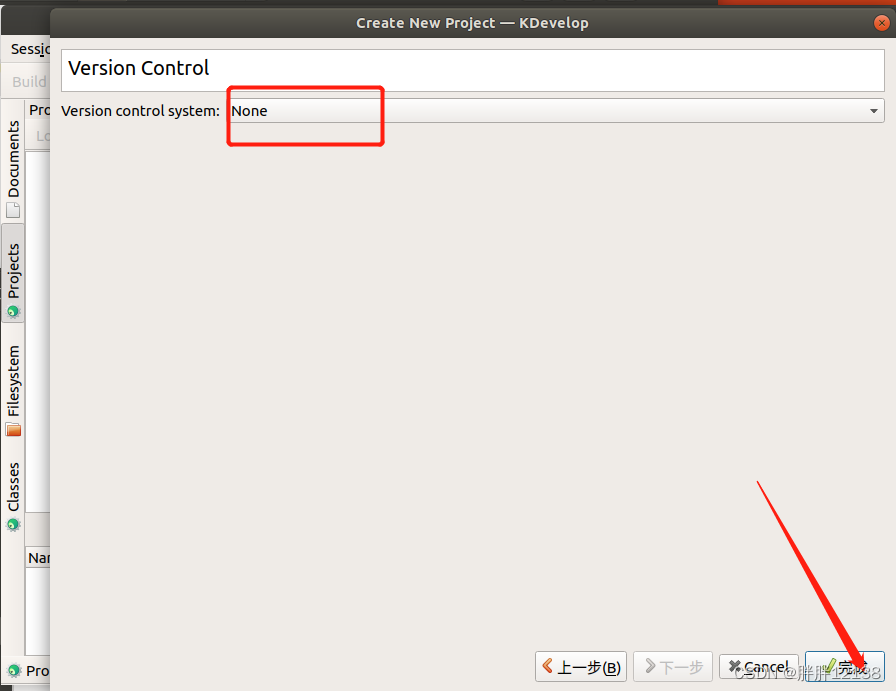
1.3 下一步,默认选择None,点击完成
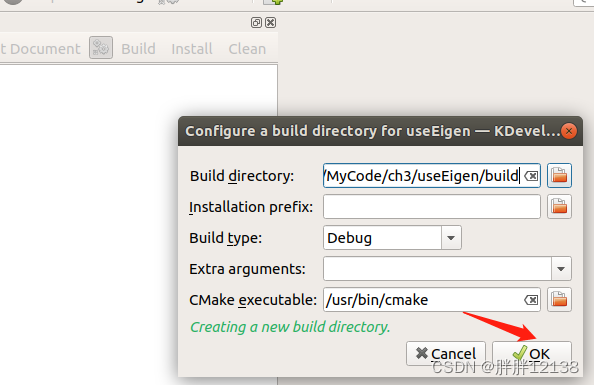
1.4 弹出窗口自动创建build文件核默认加载环境cmake,选择ok
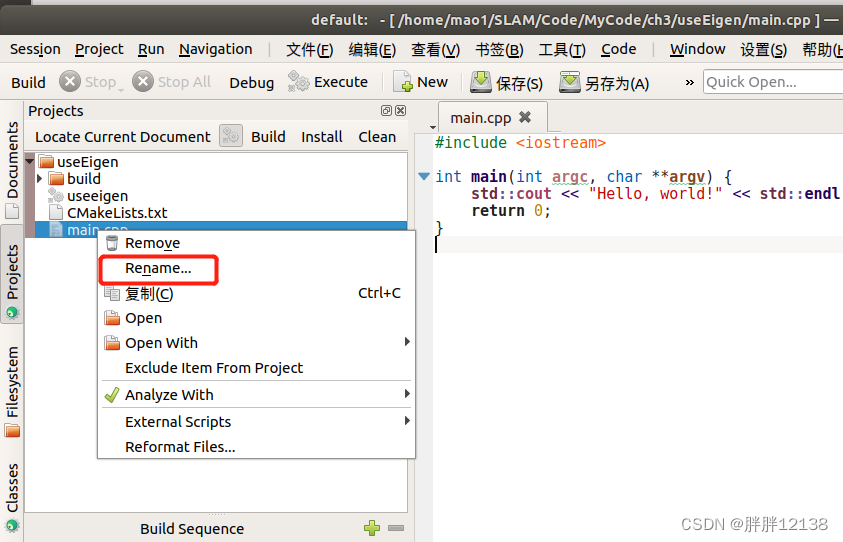
1.5项目创建好了,重命名main.cpp为eigenMatrix.cpp
二、编写程序
2.1 这里需要用到Eigen,你的电脑如果没有安装Eigen,请在终端输入以下命令进行安装
sudo apt-get install libeigen3-dev
查找Eigen头文件的位置语句
sudo updatedb
locate eigen3
2.2 安装好Eigen后就可以编写程序了,项目useEigen主要是两部分内容CMakeLists.txt和eigenMatrix.cpp
a.CMakeLists.txt
cmake_minimum_required(VERSION 2.6)
project(useEigen)
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-O3" )
# 添加Eigen头文件,路径是Eigen头文件的位置
include_directories( "/usr/include/eigen3" )
# in osx and brew install
# include_directories( /usr/local/Cellar/eigen/3.3.3/include/eigen3 )
add_executable( eigenMatrix eigenMatrix.cpp )
b.eigenMatrix.cpp
#include <iostream>
using namespace std;
#include<ctime>
//Eigen核心部分
#include<Eigen/Core>
//稠密矩阵的代数运算(逆、特征值等)
#include<Eigen/Dense>
using namespace Eigen; //可以将Eigen::Matrix简写为Matrix
#define MATRIX_SIZE 50
//演示Eigen基本类型的使用
int main(int argc, char **argv) {
//Eigen中所有向量和矩阵都是Eigen::Matrix,他是一个模板类。它的前三个参数为:数据类型,行,列
//声明一个2×3的float矩阵
Matrix<float, 2, 3> matrix_23;
//同时,Eigen通过typedef提供了许多内置类型,不过底层仍是Eigen::Matrix
//例如,Vector3d实质上是Eigen::Matrix<double, 3, 1>,即三维向量
Vector3d v_3d;
//这是一样的
Matrix<float, 3, 1> vd_3d;
//Matrix3d实质上是Eigen::Matrix<double, 3, 3>
Matrix3d matrix_33 = Matrix3d::Zero();//初始化为零
//如果不确定矩阵大小,可以使用动态大小的矩阵
Matrix<double, Dynamic, Dynamic> matrix_dynamic;
//更简单的定义矩阵方式
MatrixXd matrix_x;
//这种类型很多,不一一列举
//下面是对Eigen阵的操作
//输入数据(初始化)
matrix_23 << 1, 2, 3, 4, 5, 6;
//输出
cout << "matrix 2 × 3 from 1 to 6: <


















 5048
5048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










