




文章目录
- 一、前言
- 二、Transformer、DETR、ViT、DeepSeekOCR2的理解
- 问题1:Transformer、DETR、ViT
- 一、各自是什么?有什么作用?
- 二、各自的核心原理
- 三、三者的联系
- 四、三者的区别
- 五、一句话总结
- 问题2:技术细节
- 一:Transformer 编码器 vs 解码器,以及为什么有的模型只有其一
- 二:如何理解 DETR 的"集合预测问题"?
- 三:ViT 与 DETR 编码器的设计差异与技术细节
- 四:ViT 只能用于图像分类吗?
- 总结:一张图理清三者关系
- 问题3:与DeepSeekOCR2对比
- 一:残差后面为什么都要加 LayerNorm(LN)
- 二:编码器与解码器的 FFN 部分是否一样?核心区别是什么?
- 三:DeepEncoder V2 的掩码设计、运转方式,以及与 DETR Object Queries 的对比
- 总结
- 问题4:与SimpliHuMoN、SAM2对比
- 一:SimpliHuMoN、SAM2、标准 Transformer 三者的关系
- 二:为什么自回归生成没有被统一进 DeepEncoder V2?
- 三:DeepSeekOCR2 的直观运转例子
- 总结对比表
- 问题5:与SenseNova-U1、Vision Banana对比
- 一、两篇论文的核心架构速览
- 二、与前面讨论架构的系统性对比
- 三、深层洞察:三条技术路线的分化
- 四、一个具体的对比例子
- 五、总结性洞察
- 问题6:DeepSeekOCR2是如何让模型学会这个看图顺序的呢?
- 核心区别:DETR 需要"显式匹配",OCR2 不需要
- OCR2 如何学会阅读顺序:端到端涌现
- 一个更直观的类比
- 与标准 Encoder-Decoder 的对比
- 总结
- 问题7:DeepSeekOCR2训练数据格式
- 训练数据的实际来源和形式
- 一句话总结
一、前言
仅供参考,未经实验验证。
二、Transformer、DETR、ViT、DeepSeekOCR2的理解
问题1:Transformer、DETR、ViT
解释一下Transformer、DETR、ViT各自有什么作用,是什么原理,区别和联系是什么?
这三个概念是深度学习领域中从基础架构到具体应用的递进关系。下面我从作用、原理、联系和区别四个维度逐一解释:
一、各自是什么?有什么作用?
1. Transformer(2017,Google)
作用:一种通用的神经网络架构,最初为自然语言处理(NLP)设计,后来成为整个深度学习领域的"基础设施"。
核心任务:序列到序列的建模(如机器翻译、文本生成),现在已扩展到图像、音频、视频等几乎所有模态。
2. ViT — Vision Transformer(2020,Google)
作用:将 Transformer 直接应用于图像分类的开创性工作,证明了"不用卷积神经网络(CNN),纯注意力机制也能做好视觉任务"。
核心任务:图像分类(如判断一张图是猫还是狗)。
3. DETR — DEtection TRansformer(2020,Facebook AI / Meta)
作用:将 Transformer 应用于目标检测的端到端方法,摒弃了传统检测器中复杂的锚框(Anchor)和非极大值抑制(NMS)。
核心任务:目标检测(如图中哪里有猫、狗,并用框标出来)。
二、各自的核心原理
Transformer 的原理
核心就一句话:“Attention Is All You Need”(注意力机制就够了)。
| 组件 | 作用 |
|---|---|
| 自注意力(Self-Attention) | 计算序列中每个元素与其他所有元素的相关性权重,让模型全局地理解上下文 |
| 多头注意力(Multi-Head Attention) | 并行多组注意力,捕捉不同维度的依赖关系 |
| 位置编码(Positional Encoding) | 给没有顺序概念的注意力机制注入"位置信息" |
| 编码器-解码器(Encoder-Decoder) | 编码器提取特征,解码器生成输出 |
通俗理解:读一句话时,Transformer 不是逐字读,而是一眼看完整句话,同时判断每个词和其他所有词的关系。
ViT 的原理
核心思想:“把图像当成一句话来处理”。
原始图像 (224×224)
↓
切分成 16×16 的小块(Patch)→ 共 196 个 Patch
↓
每个 Patch 展平 + 线性投影 → 变成 196 个"视觉词向量"
↓
加入位置编码 + 类别令牌(CLS token)
↓
送入标准 Transformer Encoder
↓
输出分类结果
关键创新:用 Patch 代替 CNN 的局部卷积,用全局注意力代替局部感受野。
DETR 的原理
核心思想:“把目标检测当成集合预测问题”。
输入图像 → CNN 提取基础特征图
↓
特征图展平 + 位置编码 → 送入 Transformer Encoder(全局建模)
↓
Decoder 接收 N 个可学习的 Object Queries(目标查询)
↓
每个 Query 通过交叉注意力"搜索"图像中的目标
↓
输出 N 个预测框(类别 + 坐标),用匈牙利算法与真实框匹配
关键创新:
- Object Queries:N 个可学习的"侦探",每个负责找一类或一个目标
- 端到端:不需要预定义锚框,也不需要后处理 NMS
- 匈牙利匹配:一对一匹配预测框和真实框,解决集合预测问题
三、三者的联系
它们的关系可以用一句话概括:
Transformer 是"父架构",ViT 和 DETR 是 Transformer 在计算机视觉领域的两个"孩子",一个管分类,一个管检测。
Transformer
(基础架构)
│
┌──────────────┼──────────────┐
│ │ │
NLP领域 视觉领域 多模态领域
│ │
BERT/GPT ┌──┴──┐
│ │
ViT DETR
(分类) (检测)
具体联系:
- ViT 和 DETR 都依赖 Transformer 的核心组件:自注意力、位置编码、前馈网络。
- ViT 主要使用了 Transformer 的 Encoder 部分;DETR 则使用了完整的 Encoder-Decoder 结构。
- 两者都继承了 Transformer 的全局建模能力:不像 CNN 只能看到局部区域,它们能一眼看完整张图。
四、三者的区别
| 维度 | Transformer | ViT | DETR |
|---|---|---|---|
| 定位 | 通用基础架构 | 图像分类模型 | 目标检测模型 |
| 输入 | 词向量序列 | 图像 Patch 序列 | 图像特征图 + Object Queries |
| 使用结构 | Encoder + Decoder | 仅 Encoder | Encoder + Decoder |
| 输出 | 词序列 | 单一类别标签 | 多个目标框 + 类别(集合) |
| 核心创新 | 自注意力机制 | 图像 Patch 化 | 端到端集合预测 + Object Query |
| 任务目标 | 序列建模 | 图像分类 | 目标检测 |
| 是否需要后处理 | 不需要 | 不需要 | 不需要(无需 NMS) |
更深层的技术区别
1. 对 Transformer 的使用方式不同
- ViT:相对"直接搬运"。把图像切成 Patch,几乎原封不动地套用 NLP 的 Transformer Encoder。
- DETR:更"改造创新"。保留了 Encoder-Decoder 结构,但 Decoder 的输入变成了可学习的 Object Queries,输出变成了边界框集合。
2. 对位置信息的处理不同
- ViT:给每个 Patch 加上一维的位置编码(类似 NLP 中的词序)。
- DETR:需要二维空间位置编码(因为目标检测需要精确的坐标信息),通常使用正弦-余弦空间位置编码。
3. 训练方式不同
- ViT:标准的分类交叉熵损失。
- DETR:需要匈牙利匹配损失(Hungarian Loss)——因为输出是集合,没有固定的顺序,需要找到预测框和真实框的最佳匹配。
五、一句话总结
| 概念 | 一句话总结 |
|---|---|
| Transformer | 一种基于自注意力的通用神经网络架构,是 ViT 和 DETR 的共同基础。 |
| ViT | 把图像切成块当句子处理,用 Transformer 做图像分类。 |
| DETR | 用 Transformer 的 Encoder-Decoder 结构,把目标检测变成集合预测问题,实现端到端检测。 |
三者的演进逻辑:Transformer 从 NLP 跨界到 CV → ViT 证明了"纯注意力做视觉分类可行" → DETR 进一步证明了"纯注意力做视觉检测也可行,还能更简洁"。它们共同推动了计算机视觉从"卷积时代"进入"注意力时代"。
问题2:技术细节
1.Transformer的编码器和解码器内部分别是什么,作用分别是什么?为什么有些架构只有编码器,有些架构只有解码器,有些两者都有?梳理一下
2.DETR 的核心思想:“把目标检测当成集合预测问题”,如何理解?什么是集合预测问题?
3.如果说ViT和DETR的编码器的作用都是提取图像特征,那么两者的区别在哪?从设计的角度考虑问题,解释为什么这么设计,一个最简单直觉的问题就是,既然最终为什么ViT的Transformer Encoder接收的是"视觉词向量",而DETR的Transformer Encoder接收的确实CNN提取的特征图展平?还有ViT的Transformer Encoder输出的是分类结果,而DETR的Decoder 接收 N 个可学习的 Object Queries(目标查询),每个 Query 通过交叉注意力"搜索"图像中的目标,输出 N 个预测框(类别 + 坐标),用匈牙利算法与真实框匹配。那DETR的Transformer Encoder输出的是什么东西?然后它输出的东西又跟人为构造的N 个可学习的 Object Queries作为Decoder的输入吗?两者内在的技术细节到底是怎么样的?
4.ViT只能用于图像分类吗?
你的四个问题层层递进,从基础架构到设计哲学,我逐一深入回答。
一:Transformer 编码器 vs 解码器,以及为什么有的模型只有其一
1. 编码器(Encoder)内部是什么?
原始 Transformer 的编码器由 N 个相同的层堆叠而成,每层包含两个子层:
输入 → [多头自注意力] → [残差连接+LayerNorm] → [前馈网络] → [残差连接+LayerNorm] → 输出
- 多头自注意力(Multi-Head Self-Attention):双向的。每个输入 token 都可以"看到"序列中所有其他 token(包括前后的),计算它们之间的相关性权重。
- 前馈网络(FFN):对每个 token 独立进行非线性变换。
- 输出:一组与输入等长的上下文向量(contextualized representations),每个向量都编码了全局信息。
作用:理解/编码输入序列。它回答的是"输入序列的含义是什么"。
2. 解码器(Decoder)内部是什么?
解码器同样由 N 个相同的层堆叠,但每层有三个子层:
输入 → [Masked 自注意力] → [残差+LN] → [交叉注意力] → [残差+LN] → [FFN] → [残差+LN] → 输出
- Masked 自注意力:单向/自回归的。每个 token 只能看到自己和之前的 token,不能看到未来的 token(通过上三角掩码实现)。这是为了模拟"生成下一个词"的过程。
- 交叉注意力(Cross-Attention):这是 Decoder 独有的。它的 Query 来自 Decoder 自身,而 Key 和 Value 来自 Encoder 的输出。这是 Decoder"查阅"源信息的机制。
- 输出:逐个生成的 token 概率分布。
作用:生成/解码输出序列。它回答的是"基于源信息,下一个该输出什么"。
3. 为什么有的架构只有编码器,有的只有解码器,有的两者都有?
这取决于任务的性质:
| 架构类型 | 代表模型 | 适用任务 | 原因 |
|---|---|---|---|
| Encoder + Decoder | 原始 Transformer(机器翻译)、T5、BART | 序列到序列(Seq2Seq)任务:翻译、摘要、对话 | 需要 Encoder 理解源序列,Decoder 生成目标序列。Decoder 的交叉注意力是两者之间的桥梁。 |
| 仅 Encoder | BERT、ViT | 理解型任务:分类、情感分析、特征提取 | 双向注意力能充分利用上下文。不需要生成序列,因此不需要 Decoder 的自回归结构和交叉注意力。 |
| 仅 Decoder | GPT 系列、LLaMA | 生成型任务:文本生成、代码补全、对话 | 自回归生成天然适合单向注意力。不需要 Encoder,因为输入和输出是同一模态的连续序列(文本接文本),模型直接基于前文预测下一个 token 即可。 |
核心设计逻辑:
- 需要"理解→生成"的转换 → 两者都要(Encoder-Decoder)
- 只需要理解,输出是单一判断 → 只要 Encoder
- 只需要生成,输出是序列延续 → 只要 Decoder
二:如何理解 DETR 的"集合预测问题"?
什么是集合预测?
传统目标检测(如 Faster R-CNN、YOLO)的范式是:
- 在图像上密集铺设大量候选框(anchors/proposals,可能有成千上万个)
- 每个候选框预测"是不是目标" + “是什么类别” + “框的位置偏移”
- 最后通过**非极大值抑制(NMS)**去除重叠的重复框
这个流程是**“先过生成,再去重”**的,NMS 是手工设计的后处理,不是可学习的。
DETR 的核心思想是:直接把检测定义为"预测一个目标集合"。
输入:一张图像
输出:一个固定大小为 N 的集合(如 N=100)
集合中的每个元素 = {类别标签, 边界框坐标}
图像中可能有 3 个真实目标,但模型始终输出 100 个预测。多余的预测被归类为"无目标"(∅ / no-object)。
为什么是"集合"?
因为目标检测的输出本质上是无序的:
- 图中有一个猫和一个狗,输出
{猫在(100,200), 狗在(300,400)}和{狗在(300,400), 猫在(100,200)}是完全等价的。 - 传统方法依赖锚框的固定空间位置来赋予顺序,DETR 则抛弃了这种人为顺序。
匈牙利匹配的作用
既然输出是无序集合,训练时就需要解决:哪个预测对应哪个真实目标?
DETR 使用匈牙利算法求解最优二分图匹配:
- 构建一个代价矩阵:行是真实目标(如 3 个),列是预测(如 100 个)
- 代价 = 分类误差 + 定位误差(L1 + GIoU)
- 匈牙利算法找到一对一的最优匹配,使得总代价最小
- 匹配上的预测计算损失(正样本),未匹配的预测归类为背景(负样本)
关键特性:一对一匹配强制每个真实目标只对应一个预测,模型在训练过程中就学会了不输出重复框,因此推理时不需要 NMS。
这就是"端到端"的含义:从图像像素直接到目标集合,没有手工设计的中间环节。
三:ViT 与 DETR 编码器的设计差异与技术细节
这是你最核心的问题。两者虽然都叫"Transformer Encoder",但设计目标、输入来源、输出用途完全不同。
1. 为什么输入不同?
| ViT 的 Encoder | DETR 的 Encoder | |
|---|---|---|
| 输入 | 原始图像 Patch 展平后的向量 | CNN(ResNet-50)提取的特征图展平 |
| 设计动机 | 证明"纯 Transformer 可以处理图像,不需要 CNN" | 用 Transformer 简化检测流程,CNN 作为成熟的特征提取器 |
| 计算考量 | 图像分类输入分辨率较低(224×224),切分成 196 个 Patch 可直接处理 | 目标检测需要高分辨率特征图(如 800×1200),直接对原始像素做全局注意力计算量爆炸( O ( H 2 W 2 ) O(H^2W^2) O(H2W2)) |
设计直觉:
- ViT 的论文标题精神是"An Image is Worth 16×16 Words"——图像本身就可以是词,不需要 CNN 的归纳偏置(局部性、平移等变性)。
- DETR 的论文精神是"把检测变成集合预测"——重点在检测范式创新,不在证明 CNN 无用。用 ResNet 提取特征图是务实的选择:降低计算量、提供多尺度特征、利用预训练权重。
2. DETR 的 Encoder 到底输出什么?
DETR 的 Encoder 输出的是一组经过全局上下文增强的空间特征向量。
具体流程:
输入图像 (3×H×W)
↓
ResNet-50 Backbone → 特征图 (C×H'×W'),如 2048×25×34
↓
展平为序列 (H'×W' = 850 个 token),每个 token 是 C 维向量
↓
加上 2D 正弦-余弦位置编码(保留空间信息)
↓
Transformer Encoder (6 层)
↓
输出:850 个 d 维向量(全局增强的特征记忆)
这 850 个向量就是 Encoder 的"记忆"(Memory),它们将被送入 Decoder 的交叉注意力层作为 Key 和 Value。
3. Object Queries 是什么?与 Encoder 输出如何交互?
这是 DETR 最精妙的设计,需要分层次理解:
Object Queries 的本质:
- 它们是 N 个(如 100 个)可学习的嵌入向量,随机初始化,在训练中通过梯度下降"学习"自己的含义。
- 它们不是来自 Encoder 的输出,而是与 Encoder 输出并行的另一组输入。
- 你可以把它们理解为 N 个"侦探",每个侦探在训练过程中逐渐学会负责寻找特定类型的目标(如"负责找左下角的猫"或"负责找右上角的人")。
Decoder 的工作流程(6 层,每层相同):
Object Queries (100 × d)
↓
[Self-Attention] ← Queries 之间互相交流:"左边已经有猫了,我就不重复检测了"
↓
[Cross-Attention] ← Query 作为 Query,Encoder 输出作为 Key/Value
每个 Query "搜索"整张图像,提取感兴趣区域的特征
↓
[FFN]
↓
输出:100 个预测(类别 + 边界框)
技术细节:
- Self-Attention 在 Queries 之间:让 100 个 Query 互相知道彼此的存在,避免重复检测同一个目标。这是替代 NMS 的关键机制。
- Cross-Attention 在 Query 与图像之间:Query 向量与 Encoder 输出的全局特征做注意力,定位目标位置。
- 每层 Decoder 都输出预测:DETR 使用辅助损失(auxiliary losses)在每一层都监督,加速收敛。
4. 用一个类比来理解
想象一个侦探团队在会议室分析案件:
- Encoder:把所有证据(图像)整理成一份全局档案(850 个特征向量),放在桌上供查阅。
- Object Queries:100 个侦探,每个人都有不同的专长(有的擅长找人,有的擅长找车)。
- Decoder Self-Attention:侦探们先互相通气:“我负责左边,你负责右边,别撞了。”
- Decoder Cross-Attention:每个侦探翻阅档案(Encoder 输出),找到自己负责区域的线索。
- 匈牙利匹配:最后把侦探的报告(100 个预测)与真实案情(3 个目标)做最优匹配,计算损失。
5. ViT 的 Encoder 输出 vs DETR 的 Encoder 输出
| ViT Encoder 输出 | DETR Encoder 输出 | |
|---|---|---|
| 形式 | 197 个 token(196 图像 patch + 1 CLS)的 d 维向量 | 850 个 token 的 d 维向量 |
| 用途 | 直接用于分类(取 CLS token)或作为通用特征 | 作为 Decoder 交叉注意力的 Key/Value(“记忆库”) |
| 后续处理 | 接一个 MLP 分类头 | 送入 Decoder,与 Object Queries 交互 |
| 是否包含位置信息 | 是(一维位置编码) | 是(二维空间位置编码,更精确) |
四:ViT 只能用于图像分类吗?
绝对不是。 ViT 已经成为一种通用的视觉骨干网络(Visual Backbone),被广泛应用于各类视觉任务。
1. 直接扩展应用
| 任务 | 代表方法 | 做法 |
|---|---|---|
| 图像分类 | ViT 原始论文 | 取 CLS token,接 MLP 分类头 |
| 语义分割 | SegFormer、Segmentor、Mask2Former | 将 ViT 作为 Encoder,接专门的 Decoder(如 Mask Transformer)生成像素级掩码 |
| 目标检测 | ViTDet、DINO with ViT backbone | 用 ViT 替代 ResNet 作为 DETR/Faster R-CNN 的 Backbone |
| 实例分割 | Mask2Former、SAM | ViT 提取特征,Decoder 输出掩码 |
| 多目标跟踪 | TransTrack、MOTR | 利用 ViT 的全局建模能力处理时序信息 |
| 低层视觉 | 图像超分辨率、去噪 | 利用 ViT 的长距离依赖建模 |
2. 为什么 ViT 能跨任务通用?
因为 ViT 的 Encoder 输出的是通用的图像特征表示(generic visual representations):
- 每个 Patch token 编码了对应图像区域的语义信息
- CLS token 编码了全局图像信息
- 这些特征与具体任务解耦,可以像 ResNet 特征图一样被各类下游任务使用
3. 实际例子
- SegFormer:使用分层 ViT(Hierarchical ViT)作为 Encoder,生成多尺度特征,再用轻量级 MLP Decoder 融合,做语义分割。
- DINOv2:自监督训练的 ViT,其特征在分类、检测、分割、深度估计等任务上无需微调就能表现优异。
- SAM(Segment Anything):使用 ViT 作为图像编码器,输出特征供提示编码器和掩码解码器使用。
总结:一张图理清三者关系
┌─────────────────────────────────────────────────────────────┐
│ Transformer (通用架构) │
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────────┐ │
│ │ Encoder │ │ Decoder │ │ Cross-Attention│ │
│ │ (双向注意力) │ │ (单向注意力) │ │ (Q来自Dec, │ │
│ │ 理解输入 │ │ 生成输出 │ │ KV来自Enc) │ │
│ └─────────────┘ └─────────────┘ └─────────────────┘ │
└─────────────────────────────────────────────────────────────┘
│ │ │
▼ ▼ ▼
┌──────────┐ ┌──────────┐ ┌──────────┐
│ BERT │ │ GPT系列 │ │ DETR │
│(仅Encoder)│ │(仅Decoder)│ │(Enc+Dec) │
│ 理解文本 │ │ 生成文本 │ │ 目标检测 │
└──────────┘ └──────────┘ └──────────┘
│ │
▼ ▼
┌──────────┐ ┌──────────┐
│ ViT │ │ Decoder │
│(Encoder │ │ Object │
│ 用于图像)│ │ Queries │
│ 图像分类 │ │ 集合预测 │
└──────────┘ └──────────┘
│
▼
语义分割、检测、跟踪...
(作为通用 Backbone)
设计哲学的差异:
- ViT:“图像 = 句子,Patch = 词,纯 Transformer 就够了”
- DETR:“检测 = 集合预测,Transformer 的 Encoder 做全局特征,Decoder 的 Queries 做目标定位,匈牙利匹配做训练监督”
两者都是 Transformer 在视觉领域的成功应用,但ViT 解决的是"用什么提取特征",DETR 解决的是"怎么输出检测结果"。DETR 的 Encoder 可以替换成 ViT,形成 ViT+DETR 的组合(实际上后续工作如 ViTDet、DINO 正是这样做的)。
问题3:与DeepSeekOCR2对比
1.残差后面为什么都要加LN
2.我注意到解码器后面是[FFN] → [残差+LN] → 输出,这与编码器的后面是一样的,那这部分与编码器的这部分作用也是一样的吗?是不是可以理解为解码器跟编码器的区别只是说解码器用的是Masked 自注意力,而编码器用的是多头自注意力,还有一点区别是解码器有一个交叉注意力用于向编码器进行查询,其他是没区别的。
3.我注意到DeepSeekOCR2里面的DeepEncoder V2 中注意力掩码(Attention Mask)的架构设计也是包含双向注意力和因果注意力,如我上传的图片所示,同时我也上传了DeepSeekOCR2的整体架构,但让我感到疑问的是第一张那个解释DeepEncoder V2 中注意力掩码的图究竟在那个整体架构的什么位置,又是如何运转的?是不是只是说把Decoder里面交叉注意力变成既有双向的交叉注意力又有单向的因果注意力?还是说是别的方式?我现在有点疑惑那个DETR的N 个可学习的 Object Queries是从哪里来的? 它跟原本的transformer、跟DeepSeekOCR2里面又是什么区别和联系
你的问题非常精准,触及了现代 Transformer 架构设计的核心。我先基于你上传的 DeepSeekOCR2 架构图,逐层拆解这三个问题。
一:残差后面为什么都要加 LayerNorm(LN)
直接原因:防止数值爆炸/消失,稳定深层训练
Transformer 通常堆叠 6~12 层甚至更多。每一层包含:
- 注意力机制(加权平均)
- FFN(线性变换 + 非线性激活)
这些操作连续堆叠会导致数值范围指数级漂移(方差累积)。LN 将每个样本的所有特征维度归一化到均值为 0、方差为 1:
LN ( x ) = γ ⊙ x − μ σ 2 + ϵ + β \text{LN}(x) = \gamma \odot \frac{x - \mu}{\sqrt{\sigma^2 + \epsilon}} + \beta LN(x)=γ⊙σ2+ϵx−μ+β
这保证了无论网络多深,每一层的输入分布都保持相对稳定,梯度不会消失或爆炸。
为什么放在残差后面(Post-LN)?
原始 Transformer 采用 Post-LN:子层输出 → 残差连接 → LN。
虽然现代很多模型改用 Pre-LN(LN → 子层 → 残差,更稳定),但核心逻辑不变:
| 作用 | 说明 |
|---|---|
| 稳定注意力权重 | 注意力计算的 softmax 对输入尺度敏感,LN 防止 Q/K 数值过大导致梯度饱和 |
| 稳定 FFN 激活 | FFN 中的 GELU/ReLU 对输入分布敏感,LN 保证激活在有效区间 |
| 归一化残差流 | 残差连接 x + Sublayer ( x ) x + \text{Sublayer}(x) x+Sublayer(x) 会累积多层信息,LN 控制累积幅度 |
一句话:没有 LN,深层 Transformer 的数值会在几层内崩溃,训练无法收敛。
二:编码器与解码器的 FFN 部分是否一样?核心区别是什么?
是的,FFN 结构几乎完全相同
标准 FFN 结构:
Linear(d_model → 4*d_model) → GELU/RELU → Linear(4*d_model → d_model)
编码器和解码器中的 FFN 在数学形式、参数量、作用上完全一致:
- 对注意力输出进行非线性变换
- 增加模型的表达能力(将注意力提取的相关性映射到更高维空间再投影回来)
- 独立作用于序列中的每个位置(无位置间交互)
但解码器与编码器的核心区别远不止"Mask + 交叉注意力"
你的理解基本正确,但需要补充一个关键维度:自回归性。
| 维度 | 编码器 | 解码器 |
|---|---|---|
| 注意力方向 | 双向(看全部) | 单向(只能看左边) |
| 交叉注意力 | ❌ 无 | ✅ 有(Query来自Dec,KV来自Enc) |
| FFN/残差/LN | ✅ 有 | ✅ 有(结构相同) |
| 生成方式 | 非自回归(一次看完) | 自回归(逐个生成,输出作为下一步输入) |
| 输入来源 | 源序列(如图像/文本) | 已生成的目标序列 + Encoder 记忆 |
关键补充:解码器的 Masked Self-Attention 不仅是"方向不同",更是为了支持自回归生成。每个位置只能依赖已生成的内容,这通过上三角掩码(将未来位置设为 -∞)实现。编码器没有这种限制,因为它不需要生成序列,只需要一次性理解输入。
三:DeepEncoder V2 的掩码设计、运转方式,以及与 DETR Object Queries 的对比
这是最关键的问题。我结合你上传的两张图,逐层拆解。
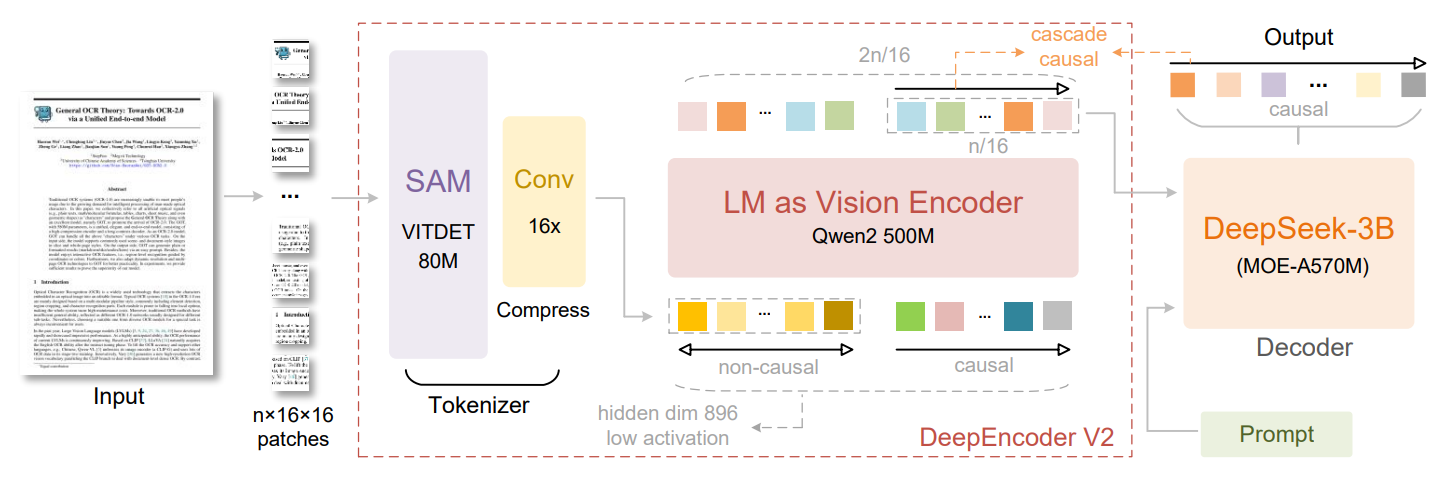
1. 图1(DeepEncoder V2 掩码)在整体架构中的位置
输入图像
↓
Vision Tokenizer (SAM + Conv) → visual tokens (前半部分)
↓
拼接序列 = [visual tokens | causal flow queries] (等长拼接)
↓
DeepEncoder V2 (Qwen2-0.5B) 内部处理
├─ visual tokens:双向自注意力(互相看)
├─ causal queries:因果注意力(看所有visual + 前面queries)
└─ 统一掩码控制
↓
输出 = 只取 causal flow queries 部分(后半部分)
↓
送入 DeepSeek-3B-A500M Decoder (MOE)
↓
自回归生成文本
图1 的注意力掩码就在 LM as Vision Encoder (Qwen2-0.5B) 的内部。它不是传统 Transformer 中分离的 Encoder 和 Decoder,而是一个统一的 Transformer 层,通过一张精心设计的掩码矩阵,同时实现三种功能。
Qwen2-0.5B 的每一层 Transformer
↓
输入:拼接序列 [V1, V2, ..., Vn, Q1, Q2, ..., Qn]
↓
┌──────────────────────────────────────┐
│ 就是这里!_create_custom_4d_mask() │
│ 视觉tokens↔视觉:双向(绿色) │
│ 查询↔查询:因果(下三角绿色) │
│ 查询→视觉:允许(绿色) │
│ 视觉→查询:禁止(粉色) │
└──────────────────────────────────────┘
↓
输出:只保留 Q1...Qn 位置的向量
源码中的关键逻辑(来自 HuggingFace 实现)
x_combined = concat(visual_tokens, learnable_queries)
y = decoder(x_combined, token_type_ids) # 内部应用自定义掩码
y = y[:, n_visual:, :] # 只保留 causal flow queries 部分
2. 掩码矩阵的运转方式:一张图替代三个模块
传统 Transformer(如 DETR)需要三个独立模块:
- Encoder Self-Attention:视觉 token 互相交流(双向)
- Decoder Cross-Attention:Decoder 查询 Encoder(单向从视觉到文本)
- Decoder Self-Attention:文本 token 互相交流(因果)
DeepEncoder V2 的创新在于:把三类 token 拼成一个序列,用统一注意力 + 掩码矩阵一次性完成。
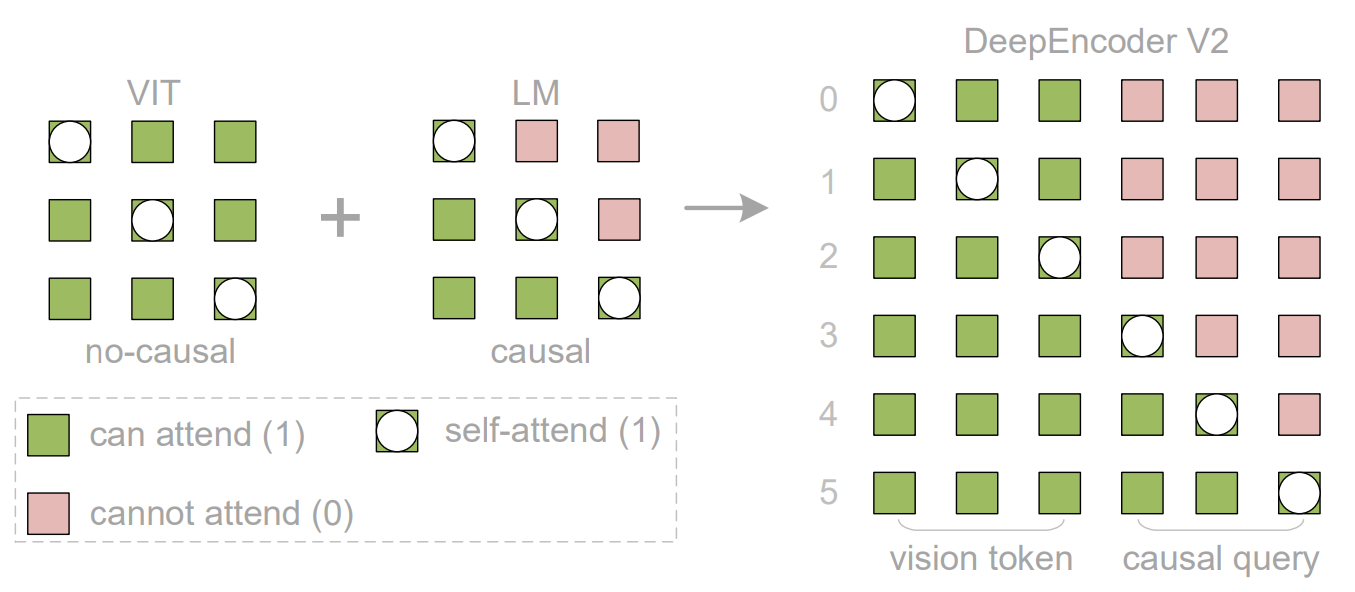
分析你上传的图1掩码(6×6 矩阵,3 个 vision token + 3 个 causal query):
| 区域 | 行 | 列 | 颜色 | 含义 |
|---|---|---|---|---|
| Vision ↔ Vision | 0-2 | 0-2 | 全绿(对角白) | 视觉 token 双向自注意力 |
| Causal ↔ Causal | 3-5 | 3-5 | 下三角绿(上三角粉) | 文本 token 因果自注意力 |
| Causal → Vision | 3-5 | 0-2 | 全绿 | 文本可以查询所有视觉信息 |
| Vision → Causal | 0-2 | 3-5 | 全粉 | 视觉不能看文本(防止污染) |
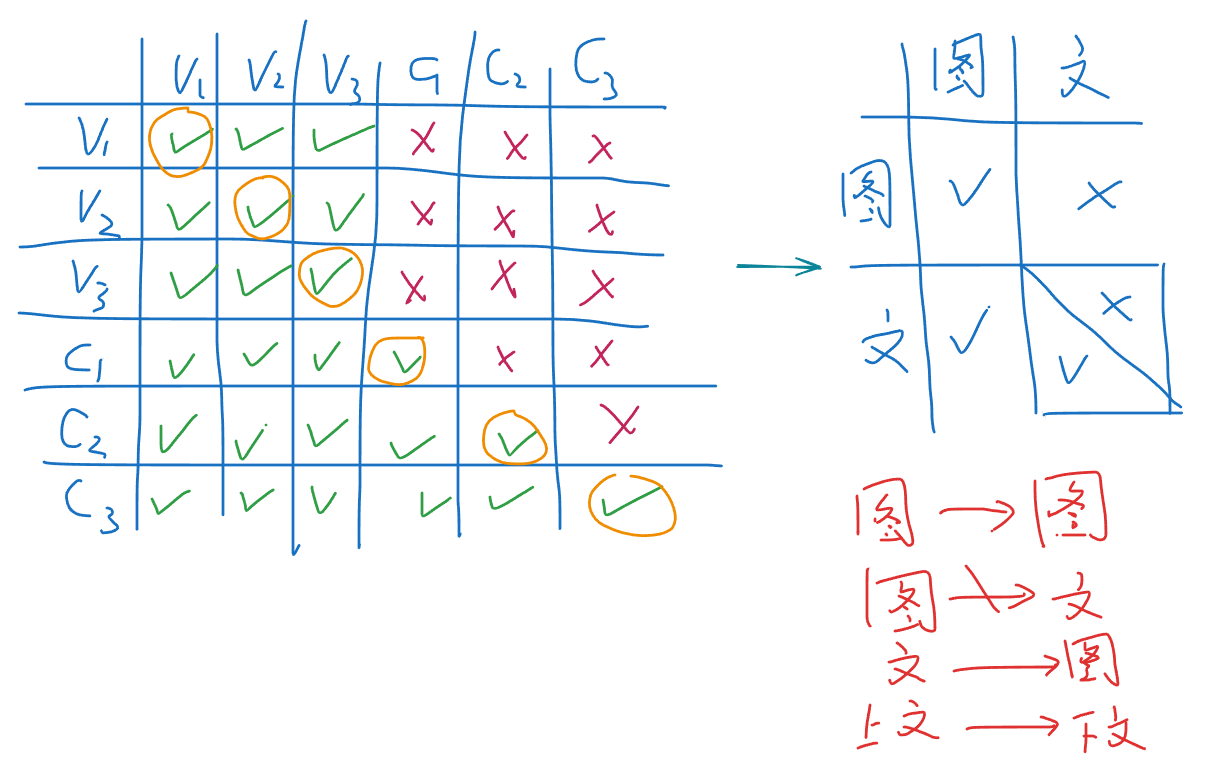
运转流程:
拼接序列 = [V1, V2, V3, C1, C2, C3] (V=vision, C=causal)
↓
统一计算 Q = K = V(标准 Self-Attention)
↓
应用 6×6 掩码矩阵(粉色位置设为 -∞)
↓
结果:
- V1/V2/V3:只被视觉信息更新(等价于 ViT Encoder)
- C1:被 V1,V2,V3 更新(等价于 Cross-Attention)
- C2:被 V1,V2,V3 + C1 更新(等价于 Cross-Attention + Causal Self-Attention)
- C3:被 V1,V2,V3 + C1,C2 更新
设计哲学:通过掩码的"软硬控制",把传统架构中物理分离的三个模块(Encoder + Cross-Attention + Decoder)压缩到一个统一的 Self-Attention 操作中。这减少了参数量、降低了计算冗余,同时让视觉和文本在同一表示空间中交互。
3. DETR 的 N 个 Object Queries 从哪来?
这是 DETR 最令人困惑也最精妙的设计。直接回答:
Object Queries 是纯粹的可学习参数,不是来自输入图像,也不是来自文本。
在代码层面:
# DETR 的核心代码逻辑
self.query_embed = nn.Embedding(num_queries, hidden_dim) # 如 (100, 256)
# 初始化:随机高斯分布
# 训练:通过反向传播自动学习
# 推理:直接使用训练好的 embedding
它们是什么?
想象有 100 个"侦探"(Queries),每个侦探在训练开始时一无所知(随机初始化)。但在训练过程中:
- 通过 Self-Attention,侦探们互相约定:“你负责左上角,我负责右下角,别重复”
- 通过 Cross-Attention(以 Encoder 输出的图像特征为 KV),侦探们学会在图像中搜索特定目标
- 通过 匈牙利匹配损失,知道哪个侦探的预测该对应哪个真实目标
训练结束后,每个 Object Query 都学会了特定的"先验":
- Query #1 可能专门检测"图像中央的大目标"
- Query #5 可能专门检测"左下角的小目标"
- Query #10 可能学会了"猫"的语义特征
DETR Decoder 的完整流程:
Object Queries (100 × 256, 可学习参数)
↓
[Masked Self-Attention] ← 100个侦探互相通气,避免重复检测
↓
[Cross-Attention] ← Query来自侦探,Key/Value来自Encoder图像特征
↓ 每个侦探"翻阅"图像档案,提取目标信息
[FFN]
↓
输出 100 个预测框(类别 + 坐标)
↓
匈牙利匹配:100 个预测 ↔ 3 个真实目标,找到最优一对一匹配
4. 三者的对比:传统 Transformer vs DETR vs DeepSeekOCR2
| 维度 | 传统 Transformer | DETR | DeepSeekOCR2 (DeepEncoder V2) |
|---|---|---|---|
| 架构形态 | Encoder + Decoder 分离 | Encoder + Decoder 分离 | 统一注意力层(掩码控制) |
| 视觉处理 | 无(纯NLP) | CNN Backbone + Transformer Encoder | SAM ViTDET Tokenizer |
| 查询来源 | Decoder 输入 = 已生成的目标序列 | 100个可学习Embedding | 文本Token的嵌入(Prompt/已生成文本) |
| 查询性质 | 自回归(逐个输入) | 非自回归(100个并行) | 自回归(逐个生成) |
| 交叉注意力 | 显式 Cross-Attention 层 | 显式 Cross-Attention 层 | 掩码矩阵隐式实现(Causal → Vision 区域) |
| 视觉→文本 | Encoder → Decoder | Encoder → Decoder | 掩码允许 Causal 看 Vision |
| 文本→视觉 | 无 | 无 | 掩码禁止 Vision 看 Causal(保持视觉纯净) |
| 任务 | 机器翻译 | 目标检测 | OCR/文档理解 |
5. 核心区别的直觉解释
DETR 的 Object Queries vs DeepSeekOCR2 的 Causal Tokens:
-
DETR:Queries 是任务特定的槽位(slots)。模型不知道图像里有什么,先准备 100 个"空位",让每个空位在训练中去学习"该检测什么"。它们是并行的、非自回归的——100 个 Query 同时处理,同时输出 100 个预测。
-
DeepSeekOCR2:Causal Tokens 是真实的文本序列。比如要识别"Hello World",C1 对应 “H”,C2 对应 “e”… 它们是串行的、自回归的——先生成 “H”,再基于 “H” 生成 “e”。
联系:两者在"查询视觉信息"这一点上是相通的。DETR 的 Cross-Attention 和 DeepEncoder V2 中 Causal → Vision 的掩码区域,功能完全等价——都是让"查询方"从视觉特征中提取相关信息。只是 DETR 用显式层实现,DeepEncoder V2 用掩码矩阵隐式实现。
为什么 DeepEncoder V2 要这样设计?
- 效率:一次注意力计算替代三次(Encoder Self + Cross + Decoder Self),计算图更简洁
- 统一表示空间:视觉和文本在同一个隐空间中交互,信息融合更充分
- 适配预训练语言模型:DeepSeek-3B 作为成熟的 MOE 语言模型,DeepEncoder V2 作为轻量"桥接"模块(hidden dim 896),负责把视觉信息对齐到语言模型的输入空间
总结
| 问题 | 核心答案 |
|---|---|
| 残差+LN | 防止深层数值漂移,稳定训练,控制梯度流 |
| Enc/Dec 区别 | FFN 结构相同;核心区别是注意力方向(双向 vs 单向)+ 交叉注意力 + 自回归性 |
| DeepEncoder V2 掩码 | 在 DeepEncoder V2 内部,用统一注意力+掩码替代传统分离式 Encoder-Decoder,绿色=允许关注,粉色=屏蔽,白色=自关注 |
| DETR Queries 来源 | nn.Embedding,纯可学习参数,非输入,非文本,训练后学会"负责检测什么" |
| 与 DeepSeekOCR2 联系 | DETR 的显式 Cross-Attention ↔ DeepEncoder V2 的掩码隐式交叉注意;DETR Queries 是检测槽位,DeepSeekOCR2 Causal 是文本序列 |
问题4:与SimpliHuMoN、SAM2对比
1.你说的这个DeepEncoder V2把三类 token 拼成一个序列,用统一注意力 + 掩码矩阵一次性完成。 怎么感觉跟这篇文章里面的注意力机制有点像https://arxiv.org/pdf/2603.04399,还有你说的传统 Transformer(如 DETR)需要三个独立模块:Encoder Self-Attention:视觉 token 互相交流(双向)
Decoder Cross-Attention:Decoder 查询 Encoder(单向从视觉到文本)
Decoder Self-Attention:文本 token 互相交流(因果),这怎么跟SAM2的注意力机制也有点像,但是SAM2好像是在解码器中,还有就是你说的传统 Transformer(如 DETR)需要三个独立模块,这在你介绍Transformer好像没有提到,当时你说的是Transformer由多头注意力、交叉注意力这些组成,并没有提到这个,怎么回事?DETR的Encoder就是标准Transformer的Encoder吗
说说上面这些的区别和联系
2.按照你对DeepEncoder V2的解释,似乎原本传统 Transformer(如 DETR)需要三个独立模块被统一了,那是不是可以理解为双向注意力和因果注意力被统一在了一起,但是自回归生成不就是因果注意力吗,为什么它没有被统一,而是单独拆出来作为一个DeepSeek-3B Decoder,独立于DeepEncoder V2而存在。还有就是DeepEncoder V2这种统一是否意味着交叉注意力实际上可以被自注意力代替?
3.DeepSeekOCR2的运转流程(包括DeepEncoder V2的运转流程)能否有更直观的解释,举个例子
你提到的论文和SAM2的对比非常关键,让我先确认一下这些技术细节。
你的观察非常敏锐。你提到的 SimpliHuMoN 论文(2603.04399)与 DeepEncoder V2 确实有设计哲学上的高度相似性,但实现路径不同。让我逐一澄清。
一:SimpliHuMoN、SAM2、标准 Transformer 三者的关系
1. SimpliHuMoN 与 DeepEncoder V2 的相似与不同
相似性(你感觉对了):
- SimpliHuMoN 明确说:“把 context 和 query 拼接成统一序列,用 self-attention 处理,而不是标准的 encoder-decoder cross-attention”
- DeepEncoder V2 也是把 visual tokens 和 causal queries 拼成统一序列,用一张掩码矩阵控制交互
关键差异:
| 维度 | SimpliHuMoN | DeepEncoder V2 |
|---|---|---|
| 注意力方向 | 完全双向(context 和 query 互相看) | 掩码控制:vision 双向,query 因果,vision↔query 单向 |
| Query 性质 | 可学习的未来时间步槽位(类似 DETR) | 文本相关 token(causal query) |
| 任务 | 人体运动预测(非自回归) | OCR/文档理解(最终要自回归生成文本) |
SimpliHuMoN 的 query 是"未来运动状态的槽位",整个模型是非自回归的(一次输出 K 个未来假设)。DeepEncoder V2 的 causal query 是文本序列的一部分,最终要接入自回归语言模型。
2. SAM2 的注意力机制
SAM2 的解码器确实使用了 cross-attention,但比标准 Transformer 更复杂:
当前帧特征(Query)
↓
Cross-Attention ← 记忆库(过去帧特征 + 提示特征)作为 Key/Value
↓
输出掩码
SAM2 的解码器是标准的 cross-attention 应用:图像/记忆特征作为 KV,当前查询作为 Q。它没有采用"统一序列+掩码"的简化思路,而是保留了显式的 cross-attention 层。
3. 标准 Transformer 确实有三个"注意力交互"
标准 Transformer(原始论文)的完整结构:
┌─────────────────────────────────────────────────────────┐
│ Encoder(6层) │
│ 每层: Self-Attention → FFN │
│ 作用: 源序列内部双向交互(理解输入) │
└─────────────────────────────────────────────────────────┘
↓ 输出作为 KV
┌─────────────────────────────────────────────────────────┐
│ Decoder(6层) │
│ 每层: Masked Self-Attention → Cross-Attention → FFN │
│ ↑ ↑ │
│ 目标序列内部因果交互 目标查询源信息(Q来自Dec, KV来自Enc)│
│ 作用: 生成输出序列 │
└─────────────────────────────────────────────────────────┘
所以标准 Transformer Decoder 每层确实有三个子层:
- Masked Self-Attention:目标序列内部的因果交互
- Cross-Attention:Decoder 向 Encoder"提问"
- FFN:非线性变换
4. DETR 的 Encoder 就是标准 Transformer Encoder 吗?
是的,几乎一模一样。
DETR 的 Encoder = 标准 Transformer Encoder(6 层,每层 Self-Attention + FFN + 残差 + LN),只有两处差异:
- 输入:不是词向量,而是 CNN(ResNet)特征图展平 + 2D 正弦-余弦位置编码
- 输出:不是接分类头,而是作为 Decoder Cross-Attention 的 Key/Value
DETR 的 Decoder = 标准 Transformer Decoder(6 层,每层 Masked Self-Attn → Cross-Attn → FFN),只是把"目标序列"替换成了 N 个可学习的 Object Queries。
二:为什么自回归生成没有被统一进 DeepEncoder V2?
这是理解整个架构的关键。分三个层次解释:
1. DeepEncoder V2 到底统一了什么?
它统一的是单层内的"视觉交互"和"视觉-文本交互":
传统架构(如 DETR) DeepEncoder V2
┌─────────────┐ ┌─────────────────────────┐
│ Encoder │ │ │
│ Self-Attn │ │ 统一 Self-Attention │
│ (视觉双向) │ │ ├─ 视觉↔视觉 (双向) │
└──────┬──────┘ │ ├─ 文本→视觉 (交叉) │
↓ KV │ └─ 文本↔文本 (因果) │
┌─────────────┐ │ (用掩码矩阵区分) │
│ Decoder │ │ │
│ Cross-Attn │ ← 合并为 → │ 统一 FFN + 残差 + LN │
│ (文本查视觉)│ │ │
└──────┬──────┘ └─────────────────────────┘
↓
┌─────────────┐
│ Decoder │
│ Self-Attn │
│ (文本因果) │
└─────────────┘
注意:DeepEncoder V2 统一的是**“Encoder 的 Self-Attention"和"Cross-Attention”**这两部分,把它们放在同一层、同一个 self-attention 操作中完成。
2. 为什么 DeepSeek-3B Decoder 仍然独立存在?
核心原因:DeepEncoder V2 和 DeepSeek-3B 是两个完全不同的东西,承担完全不同的职责,且 DeepSeek-3B 的预训练权重不可动。
a. 预训练权重不可动(最根本的原因)
DeepSeek-3B-A500M 是一个已经预训练好的、参数巨大的 MOE 语言模型(3B 总参数,570M 激活参数)。它已经在海量文本上完成了预训练,内部包含:
- 固定的层数(如 27 层)
- 固定的 MOE 路由机制
- 固定的自注意力模式(因果掩码)
- 训练好的词嵌入、FFN 权重、LayerNorm 参数
如果把它"统一"进 DeepEncoder V2,意味着要改造它的内部注意力结构(比如把 causal self-attention 改成统一掩码注意力),这会导致预训练知识全部失效。你不可能把 GPT-4 的内部层改成 ViT 的注意力模式还指望它继续生成流畅文本。
b. 职责完全不同
| DeepEncoder V2 | DeepSeek-3B Decoder | |
|---|---|---|
| 输入 | 图像像素 | Causal Flow Queries + Prompt |
| 输出 | 256 个固定长度的"阅读笔记"向量 | 变长的文本序列(逐 token 生成) |
| 核心任务 | “看图并整理笔记”:把 2D 图像按阅读顺序提取成 1D 语义向量 | “基于笔记写文章”:自回归地生成流畅文本 |
| 注意力模式 | 统一掩码(视觉双向 + 查询因果 + 交叉) | 纯因果掩码(只能看左边已生成的 token) |
| 参数规模 | Qwen2-0.5B(500M) | 3B 总参数(MOE,570M 激活) |
DeepEncoder V2 的输出是"预消化的视觉信息"——256 个向量,每个向量已经包含了"这个位置该写什么内容"的语义。DeepSeek-3B 不需要再去看图像,它只需要按顺序读取这 256 个向量,然后逐字生成文本。
c. 自回归生成是跨时间步的循环过程
这是最关键的技术细节:
DeepEncoder V2(一次性处理):
图像 → [V1~V256 | Q1~Q256] → 输出 256 个向量
↓
固定长度,一次完成
DeepSeek-3B Decoder(循环处理):
第 1 步:输入 [Prompt + Q1~Q256] → 生成 token #1
第 2 步:输入 [Prompt + Q1~Q256 + token #1] → 生成 token #2
第 3 步:输入 [Prompt + Q1~Q256 + token #1 + token #2] → 生成 token #3
...
DeepEncoder V2 处理的是"空间"(图像的 2D 布局 → 1D 阅读顺序),DeepSeek-3B 处理的是"时间"(从左到右逐字生成)。前者是一次性前向传播,后者是循环自回归。这两者在数学结构上就不一样,无法统一到一个模块里。
d. 工程解耦与灵活性
分离设计允许:
- 独立升级视觉编码:可以换更好的 Tokenizer(如更大的 SAM)或更好的 Encoder(如更大的 Qwen2),而不影响 DeepSeek-3B
- 独立升级语言模型:可以把 DeepSeek-3B 换成 7B、16B 版本,DeepEncoder V2 不需要重新训练
- 多任务复用:同一个 DeepEncoder V2 可以对接不同的 Decoder 做不同任务
e. 与标准 Encoder-Decoder 的类比
这其实就是标准 Transformer Encoder-Decoder 架构的现代变体:
标准 Transformer(机器翻译):
Encoder(理解源语言) → 上下文向量 → Decoder(生成目标语言)
DeepSeek-OCR2:
DeepEncoder V2(理解图像+提取阅读顺序) → Causal Queries → DeepSeek-3B(生成文本)
DeepEncoder V2 相当于**“图像专用的 Encoder”,DeepSeek-3B 相当于"预训练好的 Decoder"**。两者分离是架构设计的自然选择,不是"没能统一"的遗憾。
f.一句话总结
DeepSeek-3B 独立存在,因为它是一个预训练好的、负责自回归文本生成的大语言模型,其因果生成机制与 DeepEncoder V2 的一次性视觉编码在数学结构和训练目标上完全不同。DeepEncoder V2 输出的是固定长度的"阅读笔记",DeepSeek-3B 基于这些笔记逐字"写文章"。两者分离是职责分离和预训练权重保护的必然结果。
3. 交叉注意力是否可被自注意力"替代"?
在"统一序列+掩码"的框架下,功能上是等价的,但这不是"替代",而是"重构"。
| Cross-Attention | 统一 Self-Attention + Mask |
|---|---|
| Q 来自 Decoder,KV 来自 Encoder | 把 Encoder 输出和 Decoder 输入拼成一个序列 |
| 物理上是两个分离的序列 | 物理上是一个序列,用掩码区分谁能看谁 |
| 显式定义"谁查询谁" | 掩码隐式定义"谁查询谁" |
数学等价性:
当 causal query(文本侧)计算 attention 时,掩码只允许它看 vision token(视觉侧)。此时:
- causal query 的向量 = Q
- vision token 的向量 = K, V
这** exactly 就是 cross-attention 的计算**。只是 cross-attention 显式指定了 KV 的来源,而统一 self-attention 通过掩码"筛选"了 KV 的来源。
但注意:这种"替代"只在两类 token 处于同一层、同一表示空间时成立。在标准 Transformer 中,Encoder 和 Decoder 是分离的堆叠层,所以必须用显式 cross-attention。
三:DeepSeekOCR2 的直观运转例子
场景:识别一张复杂布局的文档,包含标题、两栏正文、一个表格
Step 1: 图像切分(Vision Tokenizer)
文档图像 (1024×1024)
↓
SAM ViT + Conv 16x 压缩
↓
输出 256 个 visual tokens(每个代表 32×32 像素的区域)
这些 tokens 按光栅顺序排列:左上→右下
Step 2: 构造 DeepEncoder V2 的输入
拼接序列:
[ V1, V2, ..., V256 ] ← 来自 Tokenizer 的视觉 tokens(双向)
[ Q1, Q2, ..., Q256 ] ← 可学习的 causal flow queries(因果)
↓
共 512 个 token 送入 Qwen2-0.5B
Step 3: DeepEncoder V2 内部运转(核心!)
第 1 层:
- V1~V256 互相看:全局理解整张图的结构(“这是两栏布局,左边是文字,右边是表格”)
- Q1 看所有 V + 只看自己:Q1 决定"我先看标题区域",提取标题特征
- Q2 看所有 V + Q1:Q2 决定"标题之后是左栏第一段",提取对应特征
- …
- Q256 看所有 V + Q1~Q255:最后一个 query 处理剩余区域
第 2~24 层(Qwen2-0.5B 的深度):
- 逐层细化:视觉 tokens 越来越理解语义结构
- Causal queries 逐渐确定"阅读顺序":标题 → 左栏上 → 左栏下 → 右栏 → 表格 → …
输出:只取 Q1~Q256 这 256 个向量
- 这些向量已经按语义阅读顺序编码了视觉信息
- 不再是原来的光栅顺序,而是"人类阅读顺序"
Step 4: 送入 DeepSeek-3B-A500M Decoder
Decoder 输入:[Q1, Q2, ..., Q256] + Prompt embedding
↓
DeepSeek-3B (MOE, 500M 激活参数)
↓
自回归生成:
"## 标题
正文第一段...
正文第二段...
| 表头1 | 表头2 |
|-------|-------|
| 数据 | 数据 |"
关键:Decoder 看到的不是原始视觉 tokens,而是已经被 DeepEncoder V2 重新排序、语义化的 causal flow queries。这相当于 Encoder 已经帮 Decoder “读了一遍图”,把 2D 图像变成了 1D 语义序列。
为什么 DeepSeek-3B 不能也"统一"进 DeepEncoder V2?
想象你在写一篇文章:
- DeepEncoder V2 是你在读图做笔记的过程(可以来回看图、在图上做标记、整理思路)
- DeepSeek-3B 是你在真正动笔写文章的过程(必须从左到右逐字写,不能先写结尾再写开头)
读图笔记(DeepEncoder V2)可以双向、全局、并行处理。但写文章(DeepSeek-3B)必须自回归——这是语言的本质。
总结对比表
| 架构 | 统一了什么 | 保留了什么 | 核心设计哲学 |
|---|---|---|---|
| 标准 Transformer | 无(三层分离) | Encoder Self-Attn + Cross-Attn + Decoder Self-Attn | 模块化、清晰分离 |
| SimpliHuMoN | Context + Query 统一序列,完全双向 Self-Attention | 无显式 Decoder | 简化:运动预测不需要因果性 |
| DeepEncoder V2 | 视觉双向 + 视觉-文本交叉 统一为掩码 Self-Attention | 自回归生成交给独立 DeepSeek-3B | 桥接:轻量模块做对齐,大模型做生成 |
| SAM2 | 无(保留显式 Cross-Attention) | 记忆库 + 当前帧分离 | 任务驱动:分割需要显式记忆查询 |
一句话回答你的核心困惑:
DeepEncoder V2 统一的是**“单层内的视觉交互和视觉-文本交互”,但它无法替代 DeepSeek-3B 的"跨层、跨时间步的自回归生成"**。后者是语言模型的本质,需要独立的 Decoder 来逐字"写"出答案。
问题5:与SenseNova-U1、Vision Banana对比
看看这个统一多模态模型的架构是怎么样 https://arxiv.org/pdf/2605.12500,以及这个https://arxiv.org/pdf/2604.20329,然后说说与前面讨论的架构的区别和联系,有什么洞察
这两篇论文代表了2026年多模态统一架构的两个极端方向,与前面讨论的 DeepSeekOCR2、DETR、ViT 等形成了非常有意思的光谱式对比。让我系统梳理。
一、两篇论文的核心架构速览
论文1:SenseNova-U1 (商汤,2605.12500) —— “原生统一派”
核心主张:彻底抛弃预训练视觉编码器(VE)和VAE,直接从像素和文本端到端学习。
输入图像 → 两层卷积 Patch Encoding (32×32 patch) → 视觉Token
输入文本 → 原始Tokenizer → 文本Token
↓
统一嵌入空间
↓
Native MoT (Mixture-of-Transformers) 主干
├─ 共享 Multi-Head Self-Attention
├─ Native RoPE (统一时空位置编码)
└─ 文本用自回归CE,图像用像素空间Flow Matching
↓
文本输出 ← 线性投影头
图像输出 ← MLP Patch Decoding 头 (直接预测像素,无VAE)
关键设计:
- 无VE、无VAE:没有预训练视觉编码器的归纳偏置,也没有VAE的压缩瓶颈
- Native RoPE:文本token只有时间轴T,图像token有T+H+W三维位置编码,统一在一个旋转位置编码框架内
- MoT (Mixture-of-Transformers):类似MOE,但针对多模态异构目标优化,减少理解与生成之间的干扰
论文2:Vision Banana (Google DeepMind,2604.20329) —— “生成即理解派”
核心主张:图像生成器本身就是通用视觉学习者,只需要教它"如何把理解结果格式化为RGB图像"。
输入图像 + 指令Prompt (如"用黄色分割滑板")
↓
Nano Banana Pro (图像生成器,预训练)
↓
输出RGB图像 (如黄色掩码图)
↓
解码回任务输出 (如分割掩码/深度值/表面法线)
关键设计:
- 不改造架构:保留生成器的完整结构和权重
- 轻量指令微调:混入少量视觉任务数据(分割、深度、法线),教模型输出"可解码的可视化"
- 统一接口 = RGB图像:所有视觉任务的输出都是RGB图像,通过颜色映射/聚类解码回标准格式
二、与前面讨论架构的系统性对比
对比维度1:视觉接口设计(“怎么看图”)
| 架构 | 视觉接口 | 设计哲学 |
|---|---|---|
| ViT | 图像切Patch → 线性投影 → Transformer Encoder | 纯视觉,无CNN,证明Transformer能处理图像 |
| DETR | CNN Backbone (ResNet) → 特征图展平 → Transformer Encoder | 务实:CNN提特征+Transformer做集合预测 |
| DeepSeekOCR2 | SAM ViTDET + Conv压缩 → Visual Tokens | 桥接:轻量视觉编码器把图像"翻译"给语言模型 |
| SimpliHuMoN | MLP编码历史运动 → 统一序列 | 运动预测:上下文和查询统一为token序列 |
| SenseNova-U1 | 两层卷积 Patch Encoding (32×32) | 原生像素:不依赖任何预训练编码器,直接从像素学习 |
| Vision Banana | 生成器内部自带视觉理解 (无需显式编码器) | 生成即理解:生成器在训练时已内化了视觉知识 |
洞察:从 ViT → DETR → DeepSeekOCR2 → SenseNova-U1,视觉接口越来越轻量化和原生,最终 SenseNova-U1 彻底去掉了预训练VE。而 Vision Banana 走得更远——它甚至不需要显式视觉编码器,因为生成器本身就是"理解器"。
对比维度2:统一层级(“在哪里统一”)
| 架构 | 统一发生在哪 | 机制 |
|---|---|---|
| 标准Transformer | 不统一 | Encoder-Decoder 分离,Cross-Attention 显式桥接 |
| DETR | 输出空间统一 | 集合预测:所有目标统一为 {类别, 框} 的集合 |
| DeepEncoder V2 | 单层注意力统一 | 掩码矩阵把双向视觉+交叉+因果统一在一个Self-Attention中 |
| SimpliHuMoN | 序列空间统一 | Context + Query 拼成统一序列,完全双向Self-Attention |
| SenseNova-U1 | 表示空间+训练目标统一 | 文本和图像在同一个嵌入空间,同一个MoT主干,但不同输出头 |
| Vision Banana | 任务接口统一 | 所有视觉任务 = 生成RGB图像,用"生成"统一"理解" |
洞察:统一的粒度在逐步上升:
- DeepEncoder V2:操作层统一(一层内的注意力操作)
- SimpliHuMoN:序列层统一(整个序列的token交互)
- SenseNova-U1:模型层统一(整个主干网络共享)
- Vision Banana:任务层统一(用生成任务统一所有视觉任务)
对比维度3:注意力机制设计
| 架构 | 注意力设计 | 关键特征 |
|---|---|---|
| 标准Transformer | Encoder Self-Attn + Decoder Masked Self-Attn + Cross-Attn | 三层分离,各司其职 |
| DETR | Encoder双向 + Decoder Masked Self-Attn + Cross-Attn | Object Queries 作为Decoder输入 |
| DeepEncoder V2 | 统一Self-Attention + 掩码矩阵 | 视觉双向、文本因果、视觉↔文本单向 |
| SimpliHuMoN | 统一Self-Attention,完全双向 | 无掩码,Context和Query完全互看 |
| SenseNova-U1 | Native Multimodal Attention (共享MHSA) | 文本+视觉在同一个Self-Attention空间,RoPE统一位置 |
| Vision Banana | 生成器内部的注意力 (Diffusion/AR) | 不改造注意力,利用生成器已有的注意力能力 |
关键区别:SenseNova-U1 和 DeepEncoder V2 都追求"统一注意力",但方式不同:
- DeepEncoder V2:用掩码区分谁能看谁(视觉双向、文本因果、交叉单向)
- SenseNova-U1:用Native RoPE区分位置类型(文本只有T轴,图像有T+H+W轴),注意力本身是全通的
对比维度4:生成与理解的关系
| 架构 | 理解 vs 生成 | 关系模式 |
|---|---|---|
| ViT | 只有理解(分类) | 无生成 |
| DETR | 只有理解(检测) | 无生成 |
| DeepSeekOCR2 | 理解为主(OCR),无生成 | 语言模型Decoder做文本生成,但无图像生成 |
| SimpliHuMoN | 预测未来(生成) | 非自回归生成K个假设 |
| SenseNova-U1 | 理解+生成原生统一 | 同一个MoT主干,同时做理解(CE)和生成(Flow Matching) |
| Vision Banana | 生成解锁理解 | 生成器先预训练,再指令微调做理解任务 |
这是两个截然不同的哲学:
- SenseNova-U1:"理解"和"生成"是同一个模型的两个面,应该一起学、一起长
- Vision Banana:“生成"训练已经包含了"理解”,只需要解锁它
三、深层洞察:三条技术路线的分化
把以上所有架构放在一张谱系图上,可以清晰看到三条正在收敛又分化的路线:
路线A:表示空间统一(从分离到融合)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
标准Transformer DETR DeepEncoder V2 SenseNova-U1
[Enc-Dec分离] → [Enc-Dec分离] → [单层统一] → [全模型统一]
Cross-Attn显式 Cross-Attn 掩码统一 原生RoPE统一
Object Queries
路线B:任务接口统一(从专用到通用)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
ViT(分类) → DETR(检测) → SAM2(分割) → Vision Banana(万能)
专用头 集合预测头 掩码解码头 统一为RGB生成
路线C:视觉编码的进化(从复杂到原生)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
ResNet → ViT → SAM ViTDET → SenseNova-U1
手工CNN 纯Transformer 轻量Tokenizer 两层卷积原生
特征工程 Patch化 压缩+桥接 无VE/VAE
洞察1:SenseNova-U1 是 DeepEncoder V2 的"终极进化版"
两者都追求"统一",但 SenseNova-U1 更彻底:
| DeepEncoder V2 | SenseNova-U1 | |
|---|---|---|
| 视觉编码 | SAM ViTDET (80M) + Conv | 两层卷积 (极轻量) |
| 语言模型 | 外接 DeepSeek-3B (预训练) | 原生MoT主干 (端到端训练) |
| 统一程度 | 桥接模块统一注意力 | 整个模型统一表示空间 |
| 生成能力 | 无图像生成 | 原生支持图像生成 |
| 位置编码 | 标准2D正弦 | Native RoPE (T/H/W统一) |
DeepEncoder V2 是**“在已有语言模型上做桥接”,SenseNova-U1 是"从零构建原生多模态模型"**。
洞察2:Vision Banana 揭示了"生成预训练"的隐藏价值
这是最有颠覆性的洞察:
图像生成器的训练目标(去噪/预测像素)本身就要求模型理解场景结构、语义、几何关系。因此,生成器已经是一个"通用视觉学习者",只是它的输出格式是RGB图像,而不是分类标签或边界框。
Vision Banana 的做法:
- 预训练:Nano Banana Pro 学习生成高质量图像(已内化视觉知识)
- 指令微调:混入少量视觉任务数据,教它"用RGB图像的格式输出分割/深度/法线"
- 解码:生成的RGB图像按颜色映射解码回标准评估格式
与 DETR/ViT 的本质区别:
- DETR/ViT 是判别式的:学习"这张图里有猫"
- Vision Banana 是生成式的:学习"生成一张图,其中猫是黄色的"
结果:Vision Banana 在分割、深度估计、法线估计上达到或超过SOTA专家模型(如SAM3、Depth Anything 3)。
洞察3:三条路线正在交汇
┌─────────────────┐
│ 终极目标: │
│ 一个模型, │
│ 既能理解, │
│ 又能生成, │
│ 原生多模态 │
└─────────────────┘
↑
┌──────────────────┼──────────────────┐
│ │ │
路线A: 表示统一 路线B: 任务统一 路线C: 编码原生
(SenseNova-U1) (Vision Banana) (SenseNova-U1)
│ │ │
统一Self-Attention 统一为RGB生成 无VE/VAE
共享嵌入空间 生成即理解 像素原生
SenseNova-U1 同时覆盖了路线A和路线C,Vision Banana 覆盖了路线B。未来的终极模型可能三者兼备:
- 像 SenseNova-U1 一样原生统一表示
- 像 Vision Banana 一样生成即理解
- 像 DeepEncoder V2 一样高效桥接已有能力
四、一个具体的对比例子
假设任务:“描述这张图片,并把它改成冬天风格”
| 架构 | 怎么处理? |
|---|---|
| ViT | 只能分类:“这是夏天的山景”。无法生成。 |
| DETR | 能检测出"山、树、天空"。无法生成。 |
| DeepSeekOCR2 | 能OCR识别文字,能描述图片。但无法生成图像。 |
| SimpliHuMoN | 不适用(人体运动预测)。 |
| SenseNova-U1 | 同一个模型:先理解图片内容(描述),再用Flow Matching生成冬天版本(图像编辑)。文本和图像在同一个MoT主干中流转。 |
| Vision Banana | 作为生成器,可以直接"生成冬天风格的图像"。但如果是先理解后生成,需要额外的文本模型配合。 |
五、总结性洞察
| 洞察 | 核心观点 |
|---|---|
| 1. 统一是趋势,但"在哪一层统一"决定架构形态 | DeepEncoder V2 在操作层统一,SenseNova-U1 在模型层统一,Vision Banana 在任务层统一 |
| 2. 视觉编码器正在消亡 | 从 ResNet → ViT → 轻量Tokenizer → 两层卷积原生,预训练VE的依赖越来越弱 |
| 3. 生成与理解的边界正在模糊 | Vision Banana 证明生成训练本身就包含理解;SenseNova-U1 证明两者可以原生共存 |
| 4. 位置编码是多模态统一的关键战场 | DeepEncoder V2 用掩码区分空间,SenseNova-U1 用 Native RoPE 统一时空,这是设计差异的核心 |
| 5. Object Queries 是特定时代的产物 | DETR 的 Queries 是为了解决集合预测的排序问题;在统一多模态模型中,"查询"的概念被更一般的"token交互"取代 |
最终判断:我们正处于多模态架构的范式转换期——从"拼接不同模块"(VE+LLM+VAE)走向"原生统一"(SenseNova-U1),同时发现"生成能力"可能是比"判别能力"更基础的视觉智能形式(Vision Banana)。DeepSeekOCR2 的 DeepEncoder V2 是这个转换过程中的重要中间态,而 DETR 和 ViT 则是奠定基础的先驱工作。
问题6:DeepSeekOCR2是如何让模型学会这个看图顺序的呢?
Step 3: DeepEncoder V2 内部运转(核心!)
第 1 层:
V1~V256 互相看:全局理解整张图的结构(“这是两栏布局,左边是文字,右边是表格”)
Q1 看所有 V + 只看自己:Q1 决定"我先看标题区域",提取标题特征
Q2 看所有 V + Q1:Q2 决定"标题之后是左栏第一段",提取对应特征
…
Q256 看所有 V + Q1~Q255:最后一个 query 处理剩余区域
第 2~24 层(Qwen2-0.5B 的深度):
逐层细化:视觉 tokens 越来越理解语义结构
Causal queries 逐渐确定"阅读顺序":标题 → 左栏上 → 左栏下 → 右栏 → 表格 → …
输出:只取 Q1~Q256 这 256 个向量
这些向量已经按语义阅读顺序编码了视觉信息
不再是原来的光栅顺序,而是"人类阅读顺序"
这里我不是很明白,如果说DETR是通过在图像中标注类别来训练的,那DeepSeekOCR2又是如何让模型学会这个看图顺序的呢?
这是一个非常核心的问题。让我先澄清一个关键区别,然后解释 OCR2 的学习机制。
核心区别:DETR 需要"显式匹配",OCR2 不需要
| DETR | DeepSeek-OCR2 | |
|---|---|---|
| 输出性质 | 无序集合(100个预测框,无固定顺序) | 有序序列(Q1→Q2→…→Q256,顺序固定) |
| 监督信号 | 边界框坐标 + 类别标签(需要匈牙利匹配建立"哪个框对应哪个目标") | 文本序列(自回归交叉熵损失,Q1 总是先生成,Q2 总是后生成) |
| 训练目标 | “这个框里是不是猫” | “基于 Q1 生成第一个文本,基于 Q2 生成第二个文本…” |
| Queries 学习 | Object Queries 通过匈牙利匹配学会"负责检测哪类目标" | Causal Queries 通过文本生成损失学会"负责提取哪个阅读位置的信息" |
关键洞察:OCR2 的 Q1~Q256 的索引位置本身就是顺序监督。模型不需要显式标注"Q1=标题",它只需要通过梯度下降自动发现:“如果 Q1 提取标题信息,整体文本生成损失会更低”。
OCR2 如何学会阅读顺序:端到端涌现
训练数据
输入:文档图像
输出:对应的文本(如 Markdown 格式)
损失:标准自回归交叉熵损失
训练过程(以"标题+正文"文档为例)
Step 1:初始状态
- Q1~Q256 随机初始化,每个 query 都是无意义的向量
- Q1 可能随机关注图像右下角,Q2 随机关注中间空白区域
Step 2:前向传播
图像 → Tokenizer → Visual Tokens (V1~V256)
↓
[V1~V256 | Q1~Q256] → DeepEncoder V2
↓
只取 Q1~Q256 输出 → DeepSeek-3B Decoder
↓
生成文本:"## 标题\n正文第一段..."
Step 3:损失计算与反向传播
- 如果 Q1 没有提取到标题信息,Decoder 生成第一个 token(“#”)时就会出错
- 交叉熵损失高 → 梯度反向传播
- Q1 的嵌入向量被调整:使其更关注图像中的标题区域
- Q2 的嵌入向量被调整:使其更关注标题之后的正文区域
- 同时,V1~V256 之间的双向注意力也被调整:让视觉 tokens 更好地理解"这是标题、那是正文"
Step 4:迭代收敛
经过数百万文档的训练:
- Q1 自动学会"关注最显眼的标题区域"
- Q2 学会"关注标题下方的正文起始"
- Q3 学会"继续读正文…"
- Q2 通过因果注意力看 Q1,知道"前面已经读了标题,我负责接下来的内容"
为什么是"人类阅读顺序"而不是其他顺序?
因为训练数据中的文本就是按人类阅读顺序排列的:
- 标题在前,正文在后
- 左栏在前,右栏在后
- 表格按行优先
模型为了最小化文本生成损失,必须让 Q1 包含"先生成的文本"的信息,Q2 包含"后生成的文本"的信息。如果 Q1 去关注正文、Q2 去关注标题,Decoder 就会先生成正文、后生成标题,与真实文本顺序不符,损失就会很高。
这不是显式监督,而是任务约束的涌现行为。
一个更直观的类比
想象你教一个完全不懂中文的外国人"看图写中文":
DETR 的教学方式(显式监督):
- 你指着图中的猫说:“画一个框,标类别’猫’”
- 你指着图中的狗说:“画一个框,标类别’狗’”
- 学生需要知道"哪个框对应哪个动物"(匈牙利匹配)
OCR2 的教学方式(端到端监督):
- 你给他一张图,和对应的完整文本:“这是标题,这是正文”
- 你不告诉他"先看哪里、后看哪里"
- 但他发现:如果先看标题,写出的文本顺序就是对的;如果先看正文,顺序就错了
- 经过大量练习,他自动学会"先看标题、再看正文"
Causal Queries 就是这个外国人在大脑中形成的"阅读策略":
- Q1 = “第一步:找标题”
- Q2 = “第二步:找正文开头”
- Q3 = “第三步:继续读…”
这些策略不是老师教的,而是为了完成"写出正确顺序文本"这个任务,自动涌现出来的。
与标准 Encoder-Decoder 的对比
| 架构 | 视觉信息如何进入 Decoder | Queries 的角色 |
|---|---|---|
| 标准 Transformer | Encoder 输出上下文向量,Decoder 通过 Cross-Attention 动态查询 | 无 Queries,Decoder 输入是已生成的目标序列 |
| DETR | Encoder 输出图像特征,Decoder 的 Object Queries 通过 Cross-Attention 查询 | Queries 是"检测槽位",每个负责找一类目标 |
| DeepSeek-OCR2 | Encoder 输出 Q1~Q256 作为"预提取的阅读笔记",Decoder 直接按顺序使用 | Queries 是"阅读步骤槽位",每个负责提取一个阅读位置的信息 |
OCR2 的特殊之处:
- 它把"动态查询"变成了"预提取槽位"——在 Encoder 阶段就决定了"Q1 提取什么、Q2 提取什么"
- 这比标准 Cross-Attention 更高效(Decoder 不需要每层都查询图像),但也更依赖 Encoder 的预提取质量
- 损失函数只监督最终文本,但梯度会一路回传到 Q1~Q256 的嵌入,教会它们"该看什么"
总结
一句话回答你的问题:
OCR2 没有显式标注"阅读顺序",它通过自回归文本生成损失端到端训练。因为 Q1 总是先被 Decoder 使用(生成第一个文本片段),Q2 总是被后使用(生成第二个文本片段),所以模型自动学会让 Q1 提取"先出现的文本"对应的信息,Q2 提取"后出现的文本"对应的信息。这种顺序约束来自数据本身的顺序和自回归生成的因果结构,而不是人工标注。
问题7:DeepSeekOCR2训练数据格式
你的意思是DeepSeek-OCR2的训练数据是已经从pdf转成的markdown文件吗?它里面本身就是有顺序的,是这个意思?它不是直接在pdf图片上训练?还是说图片跟markdown成对?
是的,你的理解完全正确。
DeepSeek-OCR2 的训练数据确实是"图像 + 结构化文本(Markdown/交错格式)"的成对数据,而不是直接在 PDF 文件上训练。
训练数据的实际来源和形式
1. 数据来源(论文原文)
DeepSeek-OCR2 继承了 DeepSeek-OCR 的数据源,包含三类:
| 数据类型 | 占比 | 具体内容 |
|---|---|---|
| OCR 1.0 | 约 70% | 文档 OCR + 场景文本 OCR |
| OCR 2.0 | 约 10% | 图表、化学公式、平面几何解析等复杂人工图像 |
| 通用视觉数据 | 约 20% | Caption、检测、Grounding 等 |
| 纯文本数据 | 额外 | 保持语言能力 |
文档数据的具体构造:
- 从互联网收集 3000 万页 diverse PDF,覆盖约 100 种语言
- Coarse 标注:直接用 PyMuPDF (fitz) 从 PDF 提取文本作为 ground truth
- Fine 标注:对 200 万页中英文档,用布局检测模型(PP-DocLayout)和 OCR 模型(MinerU、GOT-OCR2.0)标注,构建**"检测框坐标 + 类别标签 + 文本内容"的交错格式**(interleaved layout and text format)
Fine 标注的具体格式(论文图 5):
<paragraph> [x1,y1,x2,y2,label] 文本内容
<paragraph> [x1,y1,x2,y2,label] 文本内容
<table> [x1,y1,x2,y2,label] | 表头 | 表头 |
...
每个文本段落前面都带有它在原图中的坐标和布局类别标签(坐标归一化到 1000 个 bins)。
2. 训练时的数据形式
论文明确说训练目标是 next token prediction(语言建模),使用 image-text pairs:
输入:文档页面渲染成的图像 (PNG/JPG)
目标:对应的结构化文本(Markdown / 交错布局格式 / 纯文本)
损失:标准自回归交叉熵损失
Stage 1(Encoder 预训练)的具体配置:
- 约 1 亿图像-文本对(100M image-text pair samples)
- 双分辨率数据加载:768×768 和 1024×1024
- 序列长度 8K
- 用轻量级 Decoder 联合优化,目标就是 next token prediction
3. 为什么这能教会"阅读顺序"?
关键就在于输出文本本身是有顺序的:
| 真实文本(训练标签) | 隐含顺序 |
|---|---|
## 标题 | 第 1 个生成的内容 |
正文第一段... | 第 2 个生成的内容 |
表格内容... | 第 3 个生成的内容 |
模型学到的因果关系:
- Q1 总是被 Decoder 第一个使用 → 如果 Q1 提取的是"正文"而不是"标题",生成的文本就会以正文开头,与标签(以标题开头)不符 → 损失高
- 梯度回传 → Q1 的嵌入被调整 → 逐渐学会关注标题区域
- Q2 通过因果注意力看 Q1 → 知道"前面已经读了标题" → 学会关注标题之后的正文
这不是有人标注了"Q1=标题、Q2=正文",而是模型通过最小化文本生成损失自动发现的最优策略。
一句话总结
DeepSeek-OCR2 的训练数据是**“文档图像 + 对应的结构化文本(Markdown/交错格式)”**的成对数据。文本标签本身按人类阅读顺序排列(标题→正文→表格),模型通过自回归 next token prediction 损失,让 Q1~Q256 自动学会按这个顺序去图像中提取信息。数据来源包括 PDF 渲染图+提取文本、Word 文档、自然场景图像等,总计约 1 亿图像-文本对。

















 292
292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










