




 本文详细介绍HALCON软件中基于形状的模板匹配方法,包括创建模板、调整参数、测试及代码生成过程。通过实例演示如何在工业视觉场景中实现精准定位。
本文详细介绍HALCON软件中基于形状的模板匹配方法,包括创建模板、调整参数、测试及代码生成过程。通过实例演示如何在工业视觉场景中实现精准定位。
在工业应用中,定位是大多数应用场景必不可少的环节。通过定位,我们可以对设备作业位置或区域进行调整,如打标、切割、机械手引导等应用。除此之外,我们还可以对被测物进行定位,根据定位数据缩小检测区域以达到提高检测速度和降低误检的目的。我们一般采用模板匹配的方式对被测物进行定位。HALCON为我们提供了基于形状、基于互相关、基于描述符以及可变形的模板匹配。
以基于形状的模板匹配为例,为大家介绍如何通过HDevelop插件实现二维图像的匹配定位。
▎基于形状的模板匹配
在开始之前先让我们了解一下什么是基于形状的模板匹配。形状是事物或物质的一种存在或表现形式,如长方形、正方形等。在图像中,形状是一种对边缘或区域的描述方式。HALCON基于形状的匹配是一种通过图像边缘进行被测物识别和定位的模式识别算法。该算法对光照的变化有很好的鲁棒性且处理速度快,是工业视觉解决方案中常用的定位手段。
本次使用的图像位于“%HALCONIMAGES%\board”
▎创建模板
打开模板匹配插件→加载图像→选择模板区域

▎调整模板常数
// 标准模板参数
ROI选择完毕,点击“参数”选项卡,此时插件已经为我们自动配置了匹配参数。图像窗口中红色部分为用于匹配的模板边缘。
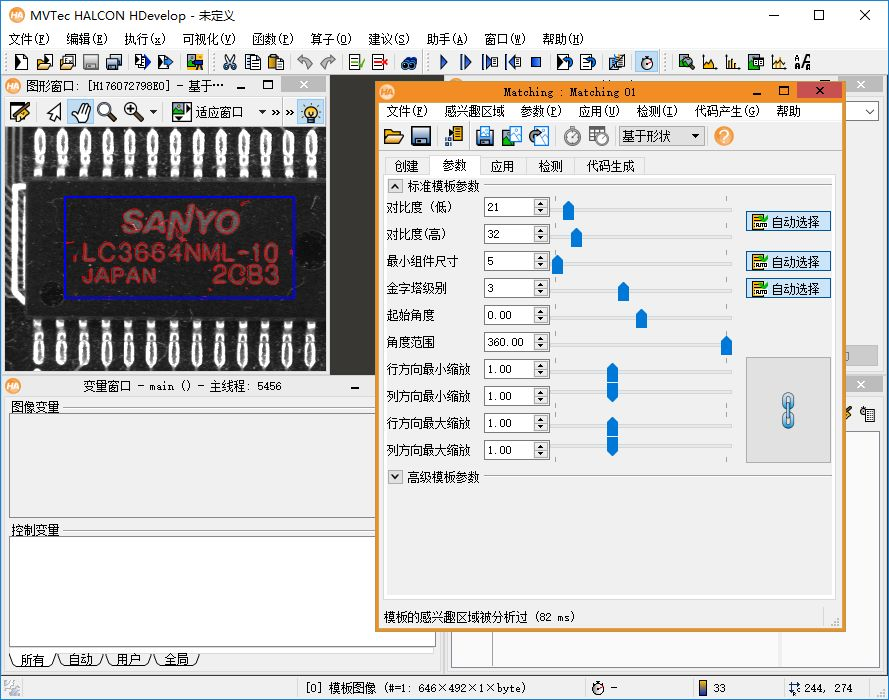
HALCON采用滞后阈值算法进行边缘的提取,我们可以通过修改“对比度(低)”和“对比度(高)”调整边缘的完整性。在边缘的提取过程中对比度超过“对比度(高)”像素会被算法选为边缘点





















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












