




使用Pyboard控制舵机
文章目录
pyboard上有4个PWM专用管脚,可用于连接舵机。舵机有三根线,分别是:地线、电源线和PWM信号线。在pyboard上,可以将它们连接在右下角,信号引脚位于最右侧。引脚 X1、X2、X3 和 X4 是 4 个专用PWM信号引脚。
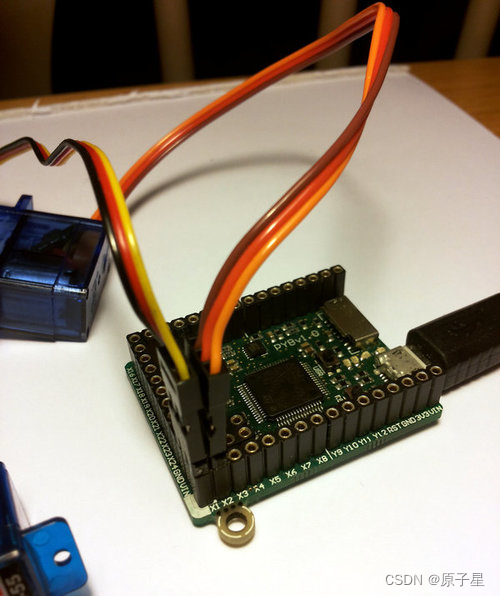
图中的公母双头适配器用于将舵机连接到电路板上的针座。舵机上的接地线通常是颜色最深的那根,黑色或深棕色,电源线一般是红色,信号线通常是黄色。
舵机的电源引脚(标为 VIN)直接连接到pyboard的输入电源。通过USB供电时,VIN 通过一个二极管由 5V USB电源线供电。连接到USB时,pyboard可为4个小舵机供电。
如果用电池为pyboard和舵机供电,要确保电池电压不大于6V,这也是大多数舵机所能承受的最大电压(有些舵机最高只能承受4.8V,因此要注意检查使用的是哪种类型的电池)。
创建Servo对象
在位置1(即引脚为X1的那个)上插入一个舵机,使用下面的方法可以创建一个舵机对象:
>>> servo1 = pyb.Servo(1)
要改变舵机的角度,可以使用angle()方法:




















:控制舵机&spm=1001.2101.3001.5002&articleId=139129422&d=1&t=3&u=b91a009c7f4441ce8bf08aafbca4a6aa)
 386
386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












