




 文章介绍了如何通过Xshell使用SFTP协议连接远程服务器,包括设置主机名/IP、端口、用户名和密码,以及如何切换和管理本地与远程目录。同时,提到了处理中文乱码的方法和sftp常用命令,如pwd、cd、ls、put和get等,用于查看和操作文件。
文章介绍了如何通过Xshell使用SFTP协议连接远程服务器,包括设置主机名/IP、端口、用户名和密码,以及如何切换和管理本地与远程目录。同时,提到了处理中文乱码的方法和sftp常用命令,如pwd、cd、ls、put和get等,用于查看和操作文件。
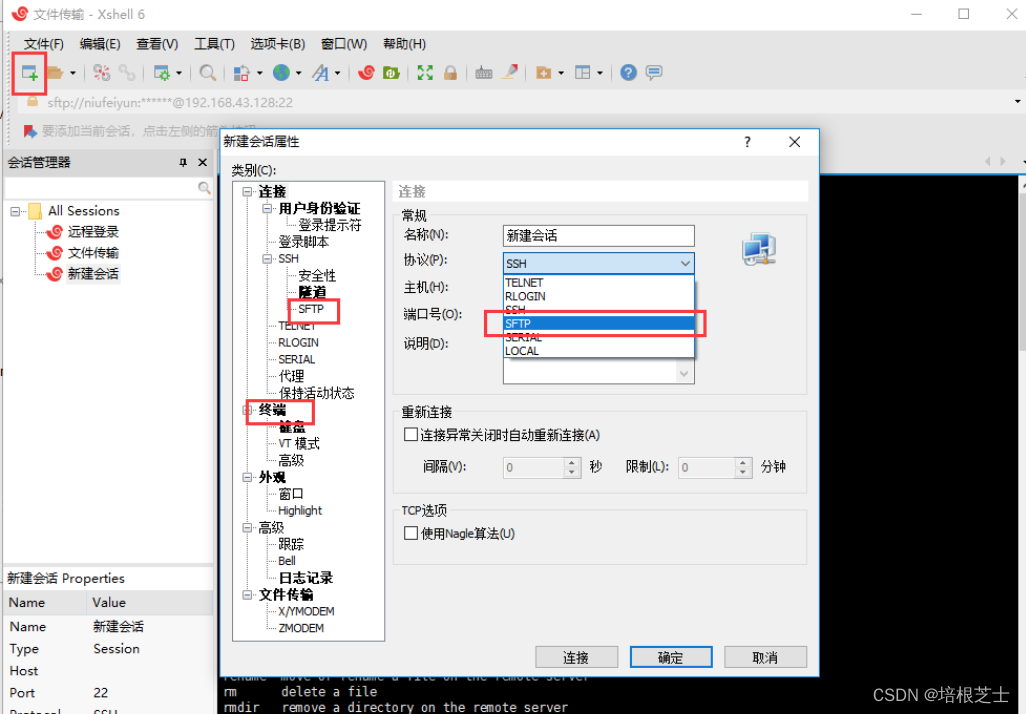
单击工具栏新建回话图标,在弹出的新建回话窗口中协议选择SFTP,输入主机名或ip地址,端口号22,单击连接,输入用户名和密码完成创建连接。
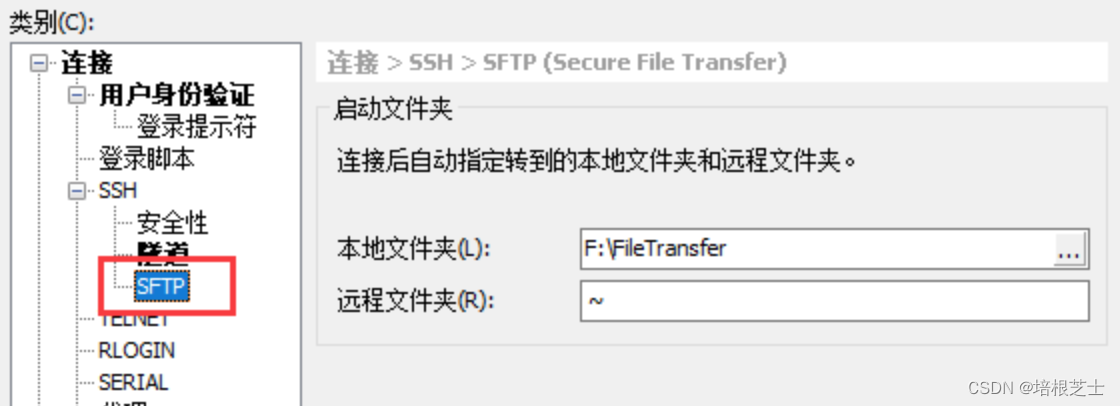
本地/远程目录设置:新建会话时在下图中SFTP中设置文件上传下载的本地和远程目录也可在终端中通过 cd 命令切换目录。
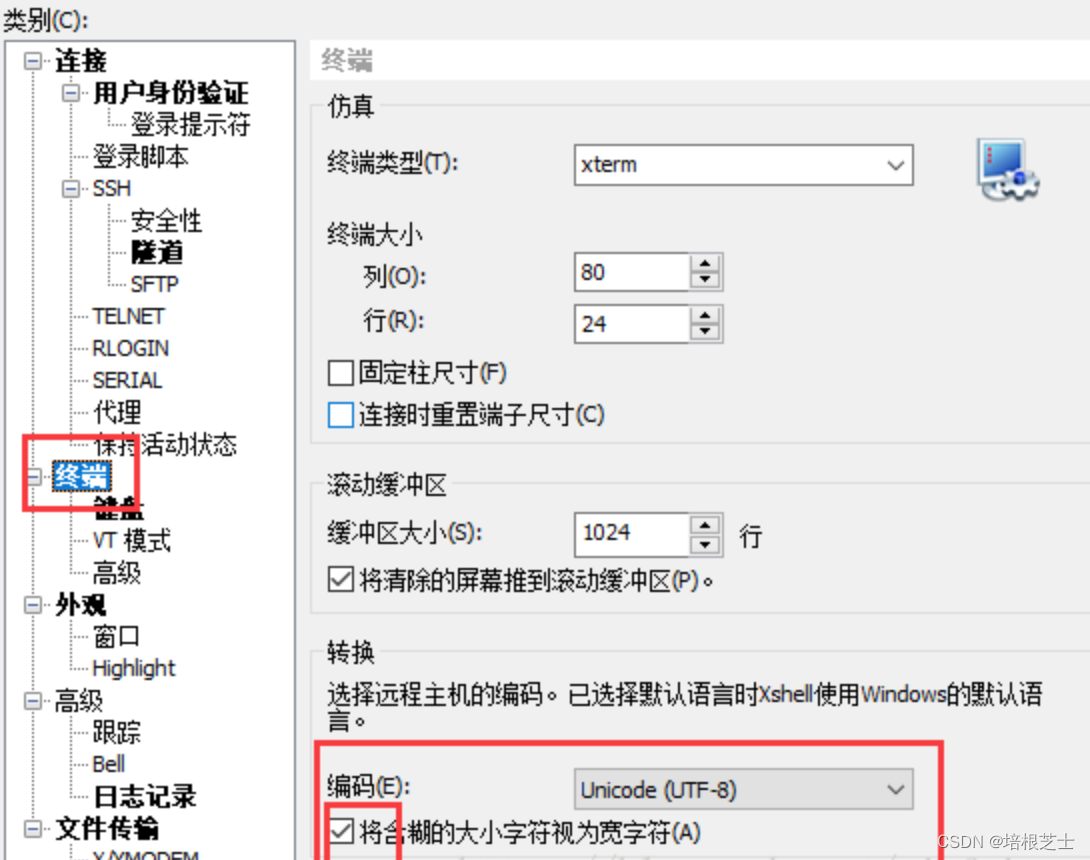
中文乱码终端中设置
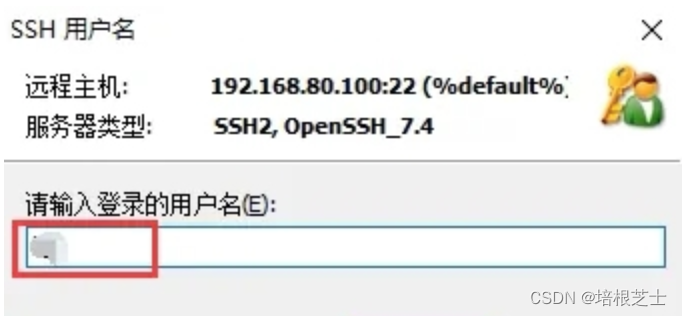
也可以直接通过sftp <ip> 命令连接远程服务器。
按照Xshell的弹窗提示,输入登录用户名及其密码。

也可以在输入命令中直接提供登录用户: sftp <user>@<ip>,这样Xshell会直接弹窗提示输入相应密码进行登录。
sftp常用命令:
pwd与lpwd,pwd是查看远程服务器的当前目录路径,lpwd是查看本地电脑的当前目录路径cd与lcd,cd是切换远程服务器的目录,lcd是切换本地电脑的目录ls与lls,ls是查看sftp服务器的当前目录的文件信息,lls是查看本地电脑的当前目录的文件信息put与get,put 是上传文件(从本地电脑到远程服务器),get 是下载文件(从远程服务器到本地电脑)exit/quit,退出




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










