



开关磁阻电机驱动系统中的功率转换电路与驱动电路优化
摘要
由于开关磁阻驱动(SRD)具有结构简单、低成本、高可靠性和高性能等优点,非常适合用于电动汽车(EV)驱动系统。功率转换电路和驱动电路是开关磁阻电机(SRM)与控制电路之间的接口,在电动汽车SRD系统中起着非常重要的作用。众所周知,SRD系统的主要问题是运行时会产生较大的电磁转矩脉动和噪声。此外,当功率开关关断时,开关和定子绕组端可能产生高电压尖峰。实际结果证明,一套良好的功率变换器和驱动电路可以缩短开关时间,减少开关损耗,并使功率半导体器件工作在理想状态。从而可提高SRD系统的效率和可靠性,并在一定程度上解决上述问题。因此,从主电路拓扑和电路布局设计方面对功率变换器进行了改进。然后,设计并优化了低成本驱动电路。最后,通过7.5千瓦三相开关磁阻电机的实验平台对变换器和驱动电路的性能进行了测试与分析。
关键词 :开关磁阻电机驱动系统; 功率转换电路; 驱动电路; MOSFET;
I. 引言
随着能源危机日益严峻和环境污染问题愈发严重,电动汽车(EV)的研发已成为当今汽车工业发展的新趋势 [1]。高效率和低排放是电动汽车的主要特点,其不依赖于汽油燃料 [2]。高能效和低环境污染使其成为实现环保型汽车最理想的选择 [3]。毫无疑问,电机驱动是电动汽车的核心技术。开关磁阻电机(SRM)不仅可用作汽车发动机的启动机,还可作为发电机,在电动汽车行业中具备很强的竞争力 [4-6]。此外,开关磁阻电机驱动系统(SRD)具有简单结构、低成本和高可靠性的优点,使其成为电动汽车驱动系统的最优方案之一 [7-9]。
国内外已开展了大量研究以降低功率变换器的变换器成本,提高驱动性能,这主要基于开关磁阻电机(SRM)固有的独特工作原理。在 [10] 中采用有限元方法分析开关磁阻电机的非线性特性,进而提出一种称为转矩分配函数(TSF)的控制方法。该方法可应用于纯电动汽车,显著降低低运行速度下的转矩脉动和噪声。在 [11] 中提出了四种适用于开关磁阻电机驱动系统(SRD)电动汽车的新型功率拓扑结构,能够在电动和发电状态下控制能量流动方向。从而最大化再生能量的利用,实现整个驱动系统的更高效率和更低成本。如 [12] 所述,开关磁阻电机已被开发为无稀土电动机的候选方案之一,并已为混合动力汽车设计并测试了一台50千瓦开关磁阻电机。实验结果表明,该样机开关磁阻电机的效率、扭矩和输出功率可与永磁同步电机相媲美。在 [13] 中介绍了采用二维和三维有限元方法进行的磁场分析,并对开关磁阻电机的横截面、轴向形状以及定子铁心进行了设计,以实现高电机效率。
从上述分析可以看出,经过对功率变换器和驱动电路这两个开关磁阻驱动系统在电动汽车应用中的关键部分进行优化后,开关磁阻电机确实非常适合用于电动汽车。本文提出了针对功率变换器和驱动电路的一些优化设计方法,并提升了整个系统的性能。
II. 电动汽车用开关磁阻电机的原理及驱动系统组成
开关磁阻电机的定子和转子铁芯由硅钢片叠压而成,具有双凸极结构。每个定子极上均有一些集中绕组线圈 [14]。
开关磁阻电机基本工作原理:最小磁阻原理(Principle of Minimum Magnetic Reluctance),即磁链总是试图形成一条最小磁阻的闭合回路路径。因此,在磁场畸变下产生切向拉力,使转子与定子对齐 [15-18]。
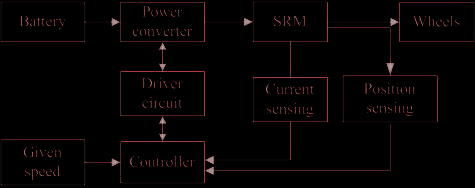
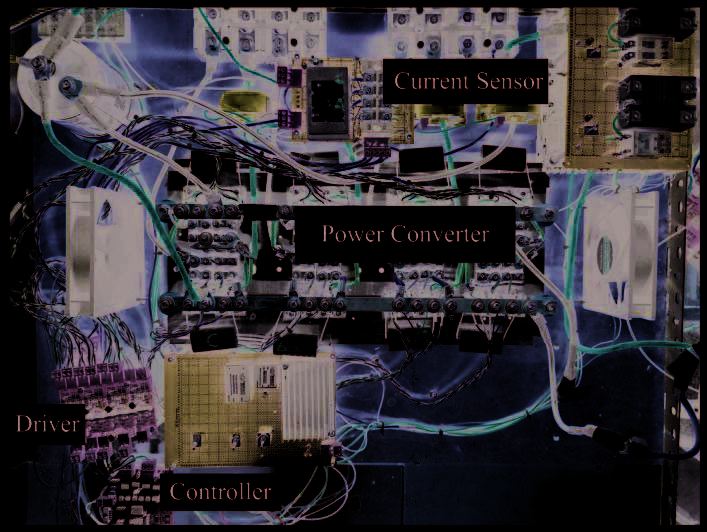
开关磁阻电机驱动系统由开关磁阻电机、电池、功率变换器、控制器、驱动电路和检测装置组成,如图1所示。
III. 功率变换器
功率变换器是开关磁阻电机调速系统的关键部分,它将直流电池电源经过一定转换后输送给电动机。功率开关根据控制信号导通或关断,从而在定子绕组上施加脉冲电压。各个功率开关可根据所需的相序开通或关断,使开关磁阻电机在期望转速和转矩下连续稳定运行。
在电机运行期间,可能会出现较大的转矩脉动、严重的振动和噪声,且当功率开关关断时,定子绕组两端会产生电压尖峰。这些问题可通过适当的控制方法和功率变换器设计方案有效解决。毫无疑问,功率变换器在整个系统成本中占比较大。因此,合理选择功率晶体管以及优化设计变换器是提高开关磁阻驱动系统性能、获得优异速度响应和运行安全的关键。通常,开关磁阻驱动系统存在五种功率变换器拓扑结构,分别为非对称半桥电路、双绕组电路、电容分压电路、H桥电路和共用开关模式电路。考虑到电动汽车应用特性对高效率、控制方便、结构简单、低成本等方面的要求,非对称半桥电路是最优选择。三相不对称半桥电路拓扑如图2所示。
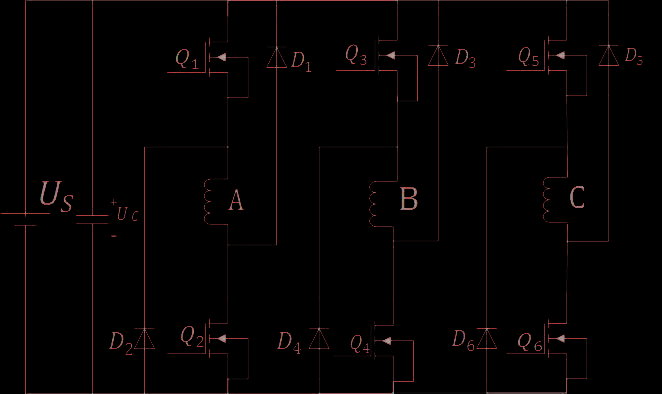
在图2中,Q1、Q2、Q3、Q4、Q5、Q6是主开关,D1、D2、D3、D4、D5、D6是续流二极管。它们的具体型号主要根据系统的容量、工作电压和工作电流来选择,这些参数可以通过正常工作系统的额定值计算得出。在本文中,样机的额定容量为7.5千瓦,额定电压为96V。
A. 电压额定值
基于非对称半桥电路,开关器件的额定电压通常等于电池的电压U。一般情况下,考虑到绕组峰值电压当功率开关的开通与关断以及电机过载情况,开关和二极管必须具有足够的安全电压额定裕度,通常为电池电压值的两到三倍。
B. 电流额定值
影响功率器件电流额定值的有两个主要因素。一个是峰值电流额定值,即相绕组中的电流脉冲;另一个是电流额定有效值,即正常工作时的稳定电流值。开关器件峰值电流的经验计算公式如公式(1)所示。利用这些公式,估算MOSFET的最大工作电流就变得简单得多。
$$
I_{max} = \frac{P}{\sqrt{3} \cdot U \cdot \eta}
\quad \text{(1)}
$$
在公式(1)中,P为开关磁阻电机的额定功率,U为电池供电电压,η为开关磁阻电机的效率。根据不同效率下的峰值电流可由(1)计算得出,最终结果如表I所示。本文中,选取0.85和0.9作为参考效率值。
| η | Imax (A) | 1.5Imax (A) |
|---|---|---|
| 0.7 | 234.4 | 351.6 |
| 0.8 | 205.1 | 307.7 |
| 0.85 | 193 | 289.5 |
| 0.9 | 182.3 | 273.5 |
| 0.95 | 172.7 | 259.1 |
考虑到开关磁阻电机的非线性特性,功率开关应具备快速开关速度和小输入电流,以及高输入阻抗、良好的热稳定性和简单的驱动电路等特性。因此,在选择功率晶体管时,应考虑开关磁阻电机的额定功率、供电电压、峰值电流和成本等因素。根据上述要求,有三种可选的功率器件,分别为智能功率模块(IPM)、绝缘栅双极型晶体管(IGBT)和功率场效应管(MOSFET)。然而,IPM和IGBT的成本相对较高。MOSFET是一种单极性电压控制器件,具有低驱动功率、简单驱动电路、快速开关速度(开关时间为10~100ns)等众多优点,因此适用于电动汽车。
为了满足功率和电流的要求,采用多个MOSFET并联连接以承受大峰值电流,这恰好具有正温度系数。本文采用IR公司生产的MOSFET IRFP4668PbF(额定电压200V,额定电流130A),四个并联连接,总共可承受520A额定电流。
开关器件之间的瞬态和稳态电流平衡问题是实现MOSFET并联结构中最关键的技术。通常,并联拓扑中产生瞬态电流不平衡的原因有多种。第一个问题是同类型器件的固有参数差异。例如,由于每个同类型MOSFET的微小特性差异,多个并联的MOSFET可能无法在同一时刻完全同时开通,导致某些器件承受过大电流而面临损坏风险。在关断过程中,由于同样的原因,某些MOSFET也可能出现类似的风险。第二个问题是电路回路中的分布参数,包括分布电感和分布电容,这些是导致瞬态电流不平衡的主要因素。此外,器件的温度特性对MOSFET并联结构也有不可预测的影响。尽管MOSFET自身具有正温度特性有利于并联连接,但由于其极快的开关速度,MOSFET可能无法形成足够的结温差异。
具有一致内部参数的MOSFET并联连接,并采用对称紧凑的布局以减少杂散电感。因此,在实际设计电路中,采取以下措施以尽可能保持平均电流流动:(1) 选用同类型器件;(2) 为均流采用适当且独立的栅极电阻;(3) 采用对称紧凑的器件布局;(4) 使用铜排母线结构的电源;(5) 在二极管与开关之间分别使用相同长度的粗短导线;(6) 优化驱动电路,使开关尽快开通或关断。
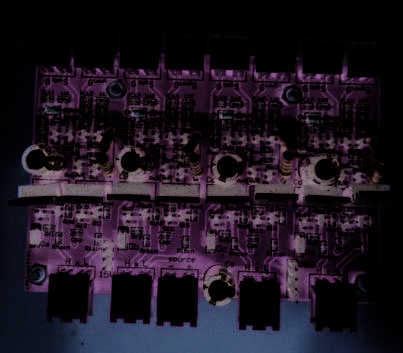
SRD功率转换器中的二极管应具备快速恢复特性和高耐压值。无论在正向还是反向,都需要具备快速恢复的特性。当主开关器件关断时,相电流将从开关器件转移到续流二极管,此时二极管应具有正向快速恢复能力。当二极管关断时,该过程应在极短时间内完成;如果开关仍处于导通状态而二极管尚未完全恢复到关断状态,则会导致电源短路并引发极其严重的后果。因此,二极管应具备优良的反向恢复性能。当转速或斩波频率非常高时,二极管只能具有极短的恢复时间。此外,由于直流电源电压Us为96V,续流二极管电压值Ur应大于(1.2~1.3)Us,系统采用了DSEI 2x121 IXYS型快恢复二极管。其反向重复峰值电压VRRM和额定工作电流IFAVM分别为200V和123A,反向恢复时间TRR为35 ns。实验中使用了两个二极管以满足要求。基于上述分析和布局原则,最终的功率变换器如图3所示。

IV. MOSFET驱动电路
与双极型晶体管相比,MOSFET只需栅源电压超过某一数值即可导通,且所需驱动电流仅为微小驱动电流。由于触发电压容易实现,MOSFET的开关速度成为一个复杂而关键的参数。众所周知,在栅极和源极以及栅极和漏极两端均存在固有寄生电容。实际上,MOSFET的驱动过程可等效为电容的充放电过程。控制电路产生的驱动信号无法直接驱动主开关器件开通或关断,原因在于瞬时短路电容充电需要瞬时大电流。因此,需要驱动器件对电流进行放大,以准确驱动主开关器件。目前主要采用驱动器件,特别是某些专用集成驱动器。然而,诸如IRF2110、IR3103、TLP250、M57962等驱动芯片的价格相对较高,加之多电源及外围电路,成本更高。考虑到电动汽车的应用情况,本文提出了一种驱动电路,该驱动电路单独用于非对称半桥电路中每一相的上下桥臂。上下桥臂的驱动电路分别如图4和图5所示,实际驱动电路的照片如图6所示。
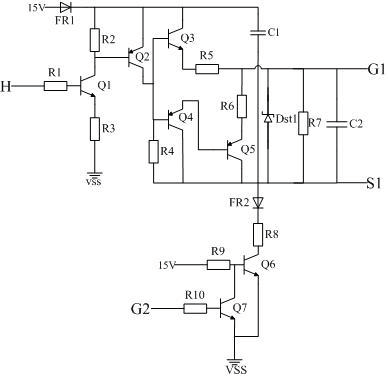
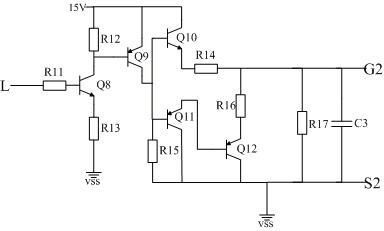
在图4中,H是控制器到上桥臂驱动电路的输入信号,G1和S1是上桥臂驱动电路的输出信号。在图5中,L是控制器到下桥臂驱动电路的输入信号,G2和S2是下桥臂驱动电路的输出信号。由于不对称半桥的特殊结构,图4和图5所示的上下桥臂驱动电路并不相同。在图1中,Q2、Q3、Q6的源极均连接至地,而Q1、Q3、Q5的源极则分别连接至每一相的相绕组。栅极驱动电压是指MOSFET的栅极与源极之间的电压。因此,在设计中引入了悬浮电容C1以实现浮动直流电源。在非导通电周期中,上下桥臂的输入和输出均为0V,此时15V电源通过二极管FR1、FR2和电阻R8对C1电容充电。在导通电周期中,H为0V,G2为15V,电容C1通过电机相绕组充电。二极管FR1可防止电流侵入15V电源,FR2可确保Q1、Q3、Q5的栅极与源极以及电源地相互隔离。
上文已指出,控制电路产生的驱动电流无法直接驱动主开关器件,因此对该驱动电路进行了改进,即由晶体管Q2、Q3和晶体管Q1组成的达林顿管可以放大驱动电流。在MOSFET导通瞬间,改进的驱动电路能够提供足够大的充电电流,从而实现快速为栅极和源极之间的电容充电,使栅源电压在短时间内升高到期望值,从而快速导通MOSFET。R5为栅极电阻(5Ω~100Ω),串联在驱动电路输出端与栅极之间,其作用是调节MOSFET的开关速度,减小栅极的振铃现象和电磁干扰,并限制栅极电容的充放电电流。
MOSFET的固有特性导致其关断速度比开启速度快。然而,在大多数应用中,关断速度应尽可能快,本文引入了由Q4和Q5组成的达林顿管电路,可在MOSFET关断瞬间提供足够的放电电流,加速栅源电容的放电过程,快速释放栅源电容器上的电荷,使栅源电压在短时间内下降至所需值,从而加快关断速度。然而,随着关断速度的加快,杂散电感引起的冲击过电压可能更大,因此需要在Q5的发射极处设置R6来控制关断速度。
正偏置电压UGS可以使MOSFET导通,且随着UGS的增加,开关速度可以降低,同时开关损耗也可以减少。然而,栅极与源极之间的驱动电压过高可能会导致栅极与源极之间的氧化层击穿,从而损坏功率器件。因此,如图3所示的稳压二极管可以防止稳压电容过充电。
在改进的驱动电路中,仅需一个15V电源。与现有的其他驱动芯片相比,所使用的电源大大减少,整个系统的成本也降低了。
V. 实验结果与分析
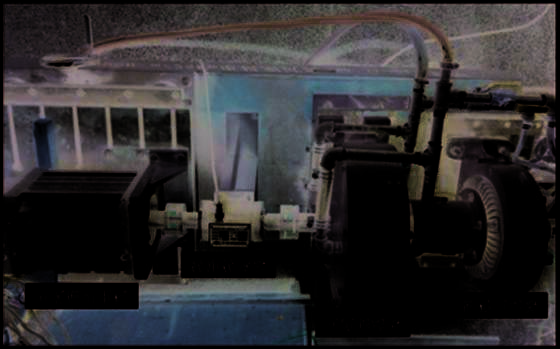
为了测试上述功率转换电路和驱动电路的性能,采用一台三相12/8电机进行实验,开关磁阻电机的额定功率为7.5千瓦。实验的主要目的是测试并分析电机运行过程中的电流波形和驱动电路输出波形。图7为测试平台,实验结果如图8所示。
(a) n=570r/min T=30N·m I=61A P=1.79kW
(b) n=570r/min T=60N·m I=117A P=3.58kW
(c) n=930r/min T=58N·m I=120A P=5.65kW
(d) n=1600r/min T=42N·m I=125A P=7.04kW
(e) n=1500r/min T=51N·m I=125A P=8.01kW
在图8中,n表示电机转速,T表示电机扭矩,P表示电机输出功率,I表示电机峰值电流。横坐标表示时间,2.5毫秒/格;纵坐标通道1表示电流信号,60A/格;通道2表示驱动器输出信号,10V/格。
在图8 (a) 和 (b) 中,相电流的AD采样频率为20千赫兹,运行速度已降至570转/分钟。当扭矩和负载峰值电流分别增加至60牛·米、117安培时,驱动器输出波形仍可靠且稳定,电机正常运行。关于图8 (c),当转速上升至930转/分钟且输出功率达到6千瓦时,驱动输出仍如之前一样正常。图8 (d) 显示了转速和输出功率分别达到1600转/分钟和7.04千瓦时的结果。此时驱动波形输出达到了预期的测试效果,尽管相电流未能达到斩波限值且上下开关同时导通。正如图8 (e) 所示,当运行速度、峰值电流和输出功率分别达到1500转/分钟、125安培和8.01千瓦时,驱动输出波形良好,设备也能长期稳定运行。
图8证明,驱动电路能够正确触发和关断开关器件MOSFET,并满足基本设计要求,驱动电路的输出波形会随着控制步而上升和下降。即使在最大峰值电流为125A、输出功率为8.01kW的情况下,驱动电路仍能良好运行。更不用说,该驱动电路基本上可以替代某些开关驱动集成电路。
VI. 结论
本文分析并总结了开关磁阻电机在电动汽车中应用的发展现状与前景,同时强调了开关磁阻电机控制系统研究的重要性。针对电动汽车中开关磁阻电机驱动系统调速的要求,文中对功率变换器和驱动电路进行了优化,显著提升了系统整体性能并降低了成本。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










