






一、前置符号与基本模型
1. 齐次坐标约定
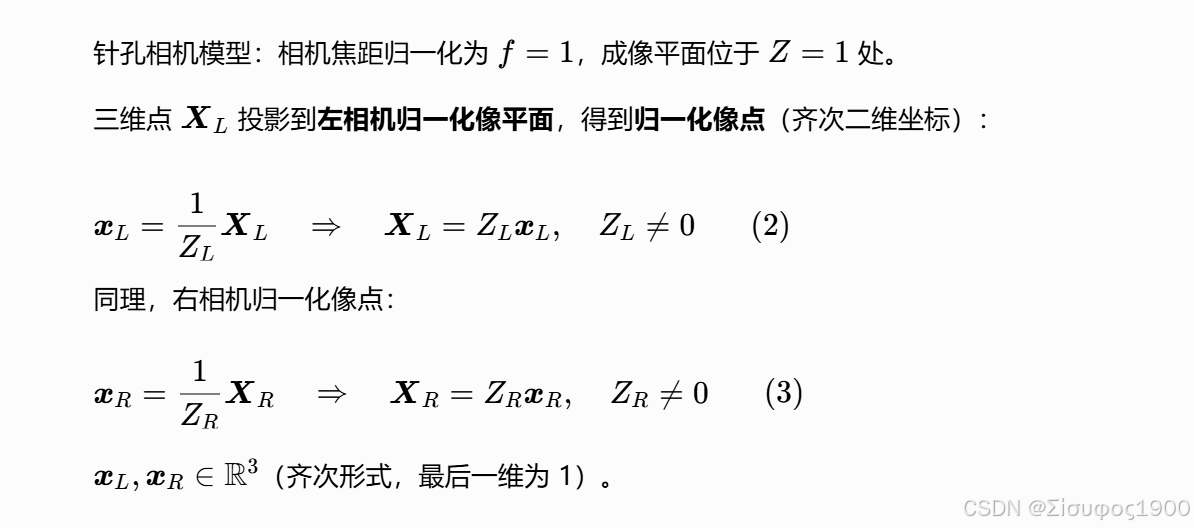
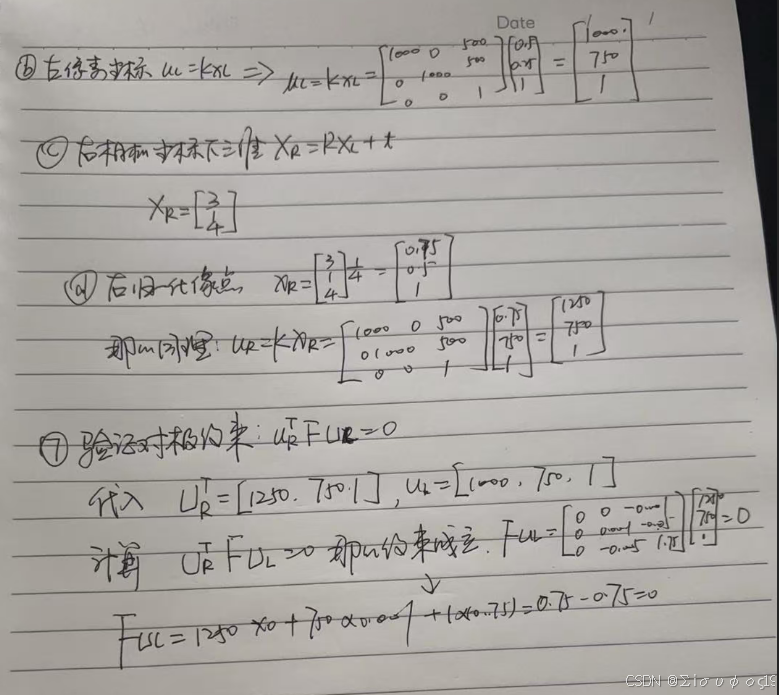
- 图像像素点:齐次,u=[u,v,1] ^t 非齐次 (u,v)
- 空间三维点:齐次 X=[X,Y,Z,1]^t
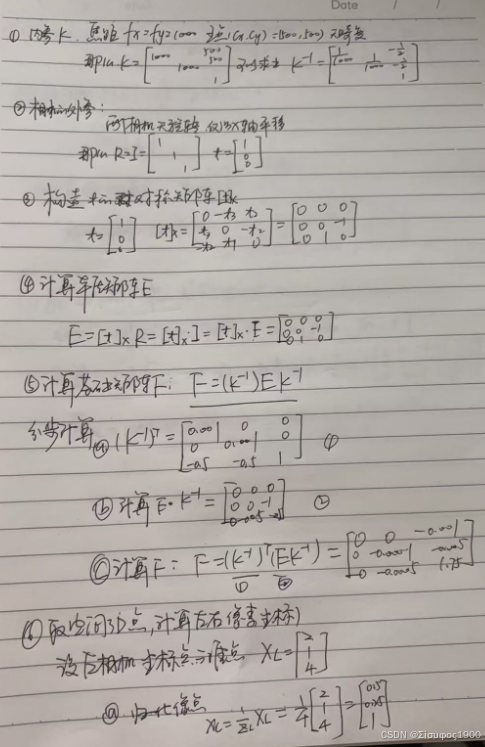
- 相机投影矩阵:P=K[R t]
2. 双目相机模型
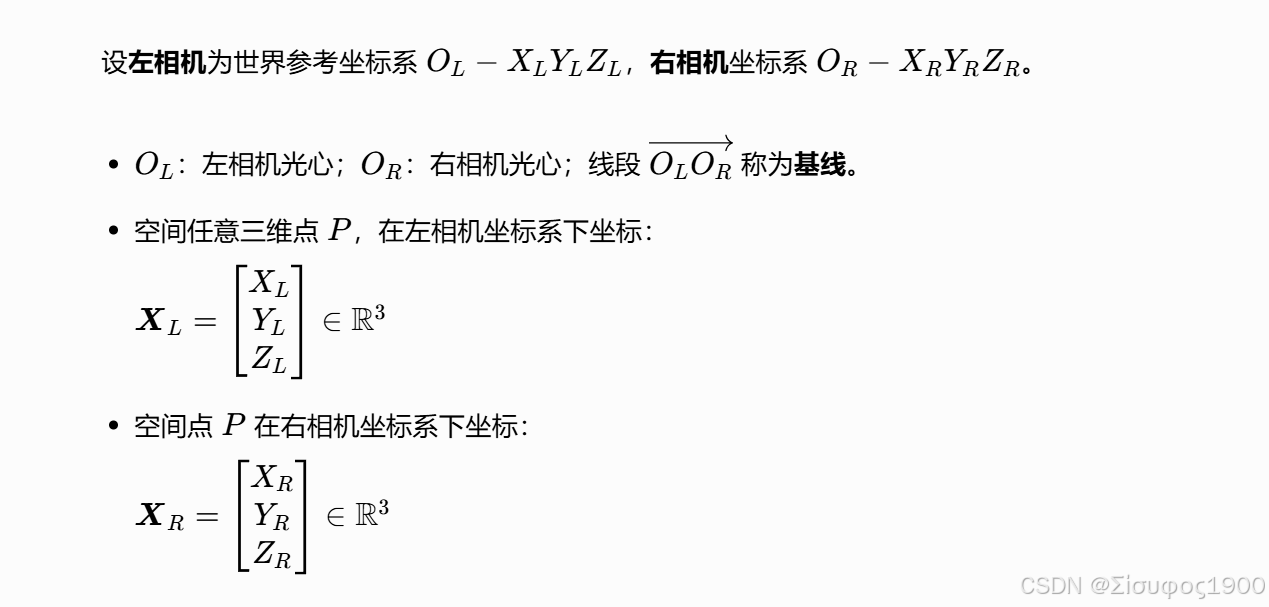
设左相机 C_1、右相机 C_2:
- 左相机为世界坐标系:R_1=I,t_1=0,投影矩阵 P_1 = K_1 [ I 0]
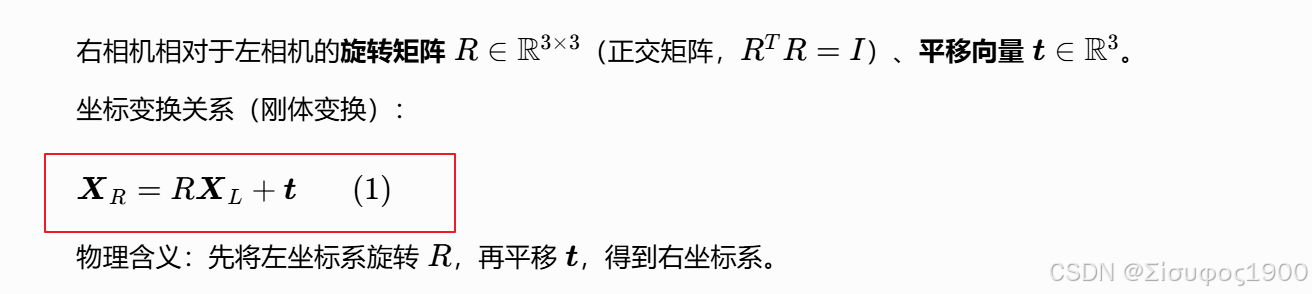
- 右相机相对左相机:旋转 R,平移t,投影矩阵 P_2 = K_2 [ R t]
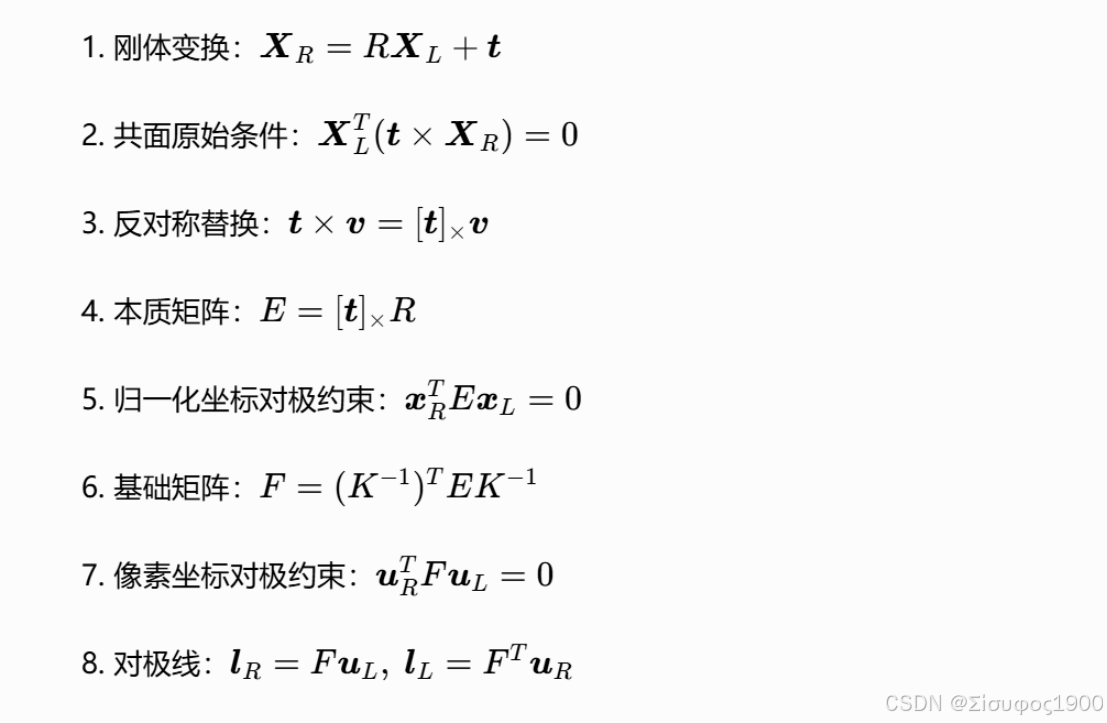
二、本质矩阵和基础矩阵
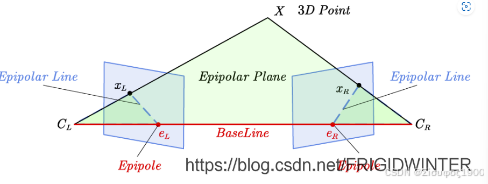
0、对极几何
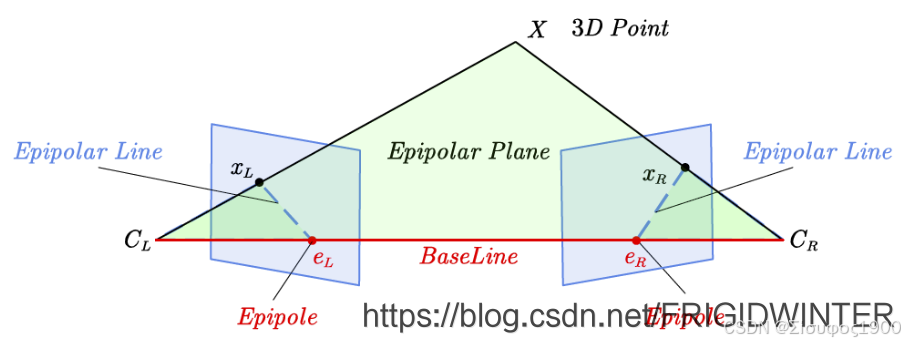
那么如何计算极线l?
这里需要用到本质矩阵E。本质矩阵是一个 3 x 3 矩阵,用于编码对极几何。对于给定的一幅图像中的点,乘以本质矩阵将告诉我们第二个视图中的极线。
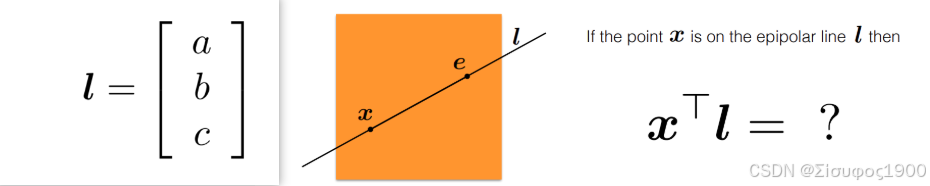
极线
直线方程: ax+by+c=0, 写成向量形式:
对极几何约束
1.1 坐标系与点表示
1.2 相机相对位姿(外参)
1.3 归一化像点(相机归一化平面)
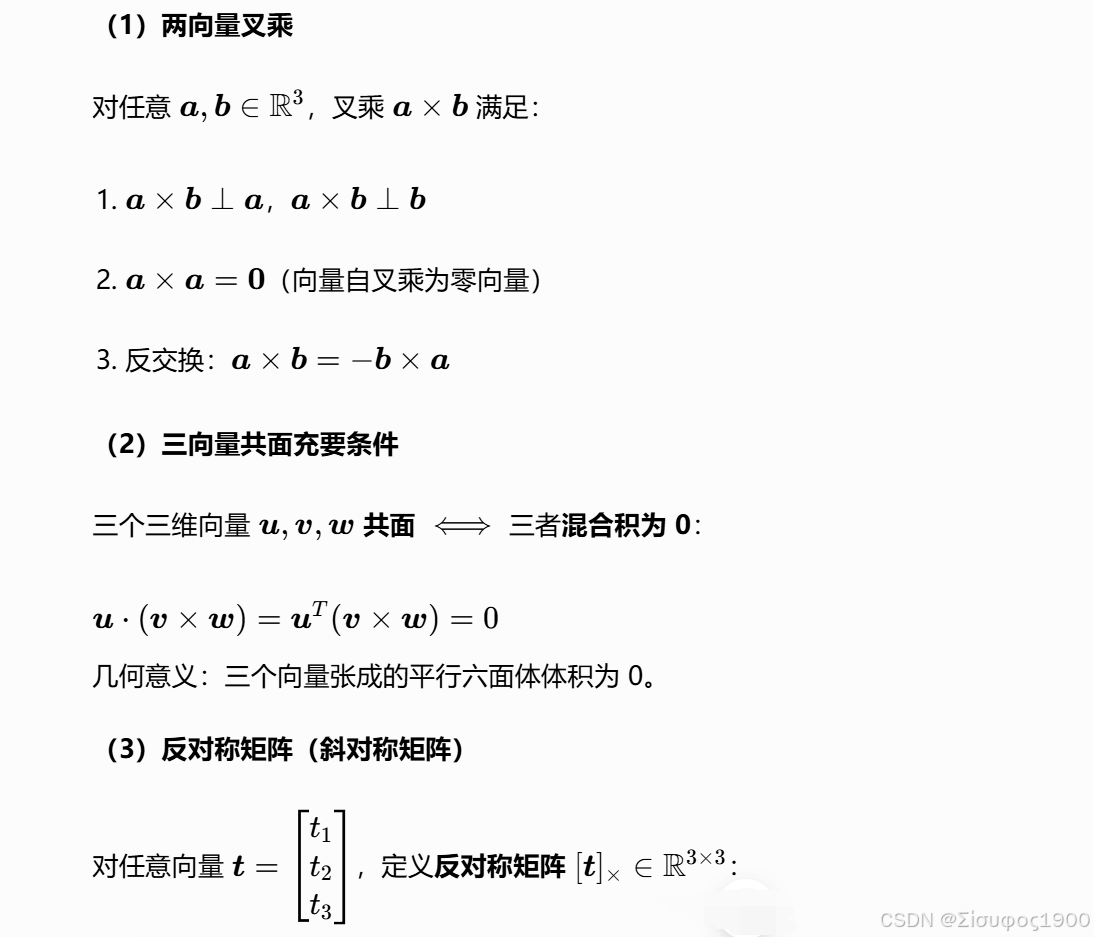
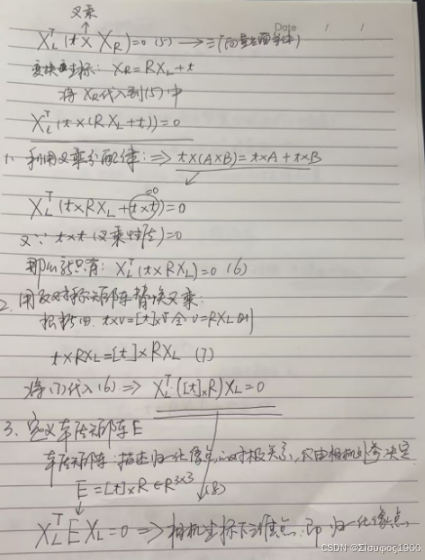
1.4 向量叉乘、混合积与共面条件
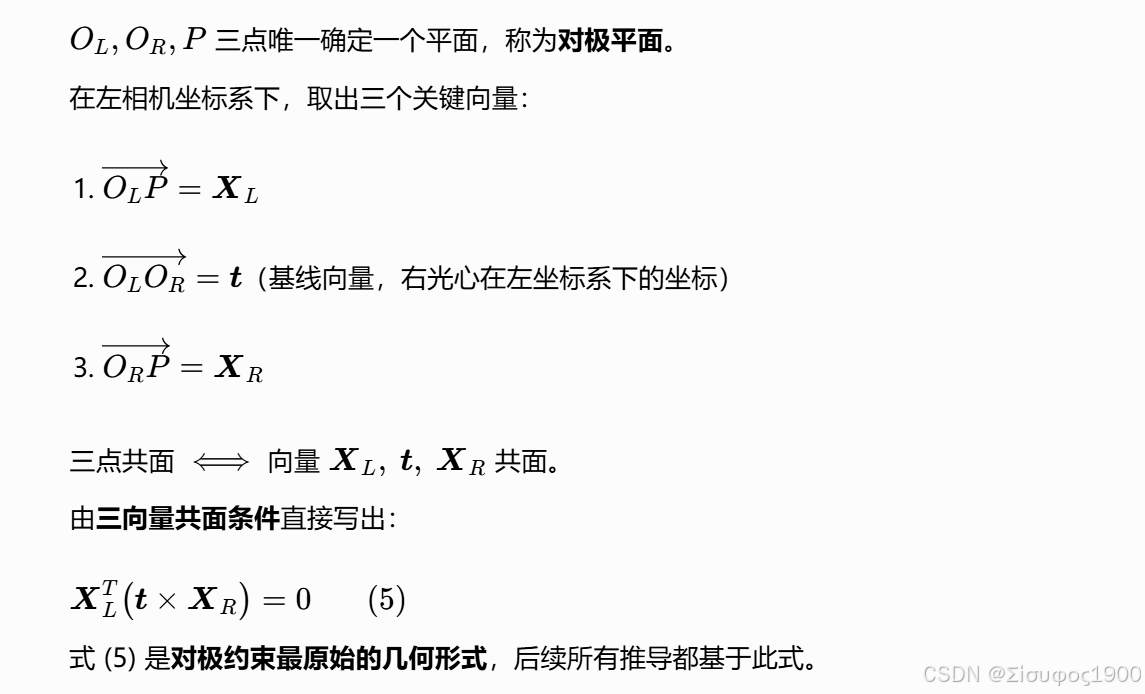
几何前提:对极平面与共面关系
1、本质矩阵E
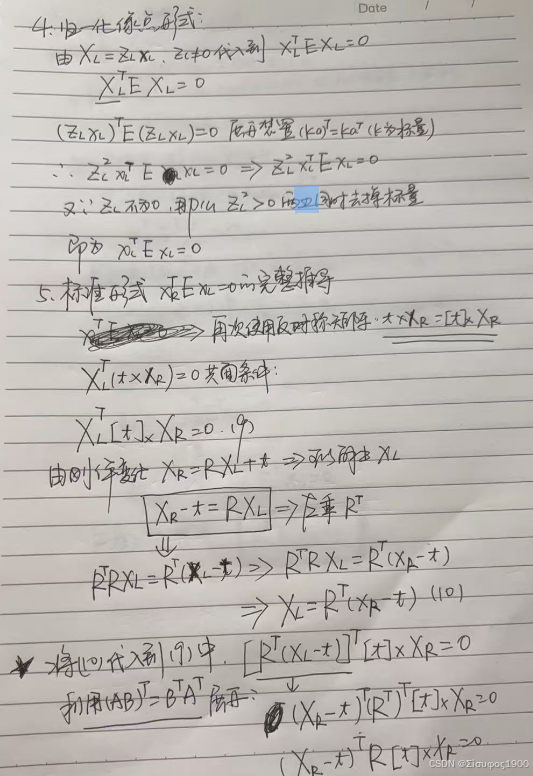
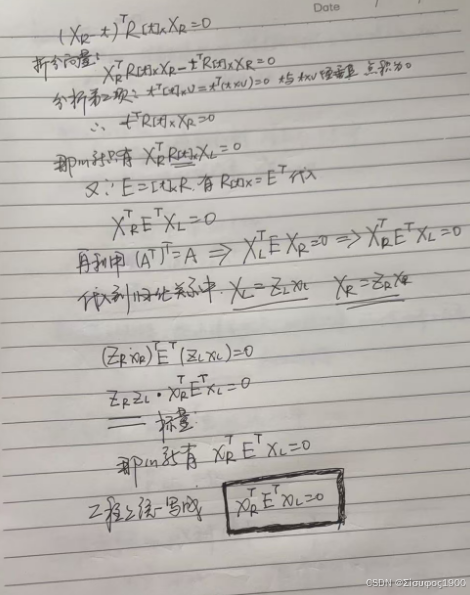
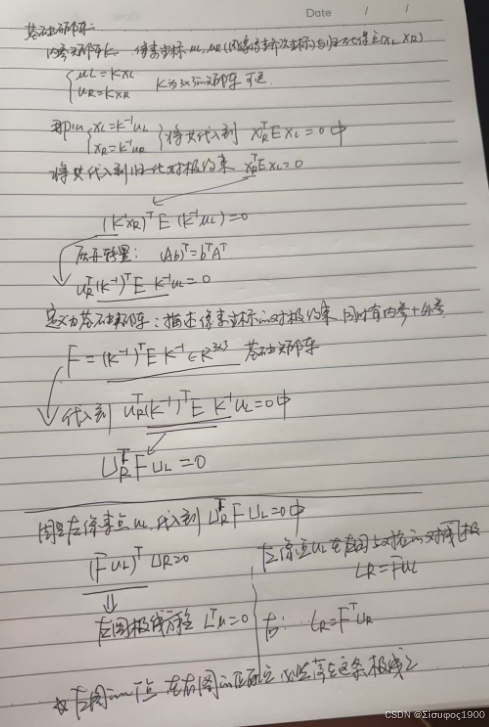
2、本质矩阵->基础矩阵
3、验证极线对齐



















 454
454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










