






Ubuntu 16.04 安装并配置 ROS Kinetic 环境(详细)
这次是以软件源安装。
ROS发布版本ROS KInetic kame(推荐版本)对应的Ubuntu 16.04(Xenial)
官方安装说明:http://wiki.ros.org/Installation/Ubuntu?distro=kinetic
1、先在VMware WorkStatin 安装Ubuntu
在下面这个网址下载镜像文件ubuntu-16.04.5-desktop-amd64.iso。
http://releases.ubuntu.com/16.04/?_ga=2.234863774.167349057.1548117939-309697745.1541505388
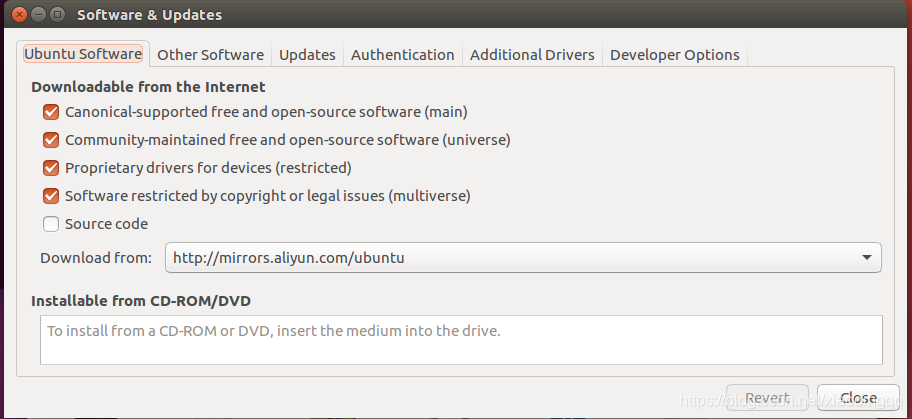
2、安装完Ubuntu后,在System Settings==>>Software & Updates配置软件源,允许universe,restricted,multiverse这三种软件源,以及选择国内的源。
universe:Ubuntu官方不提供支持与补丁,全靠社区支持
restricted:不完全的自由软件
multiverse:非自由软件,完全不提供支持和补丁
Download from:http://mirrors.aliyun.com/ubuntu 或者 http://mirrors.ustc.edu.cn/ubuntu(尽量选择国内的源China)
3、添加ROS官方的软件源镜像:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
4、添加密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
5、确保之前的软件源修改得以更新
sudo apt-get update
6、若不执行该命令,第8步会出错
sudo apt-get install dpkg
7、安装ROS,桌面完整本安装(Desktop-Full),这个过程也许会很久
sudo apt-get install ros-kinetic-desktop-full
8、初始化rosdep,初始化和更新依赖
sudo rosdep init
rosdep update
9、设置环境变量
ROS已经成功安装到计算机中,默认在/opt路径下。
在bash中设置ROS环境变量。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
10、安装rosinstall,便利的工具
rosinstall是一个可以下载和安装ROS中的功能包程序
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
11、管理环境
确保你已经设置了像ROS_ROOT和ROS_PACKAGE_PATH这样的环境变量,可以通过以下命令查看:
export | grep ROSsource /opt/ros/kinetic/setup.bash
12、测试ROS安装成功
用roscore命令启动ROS Master
roscore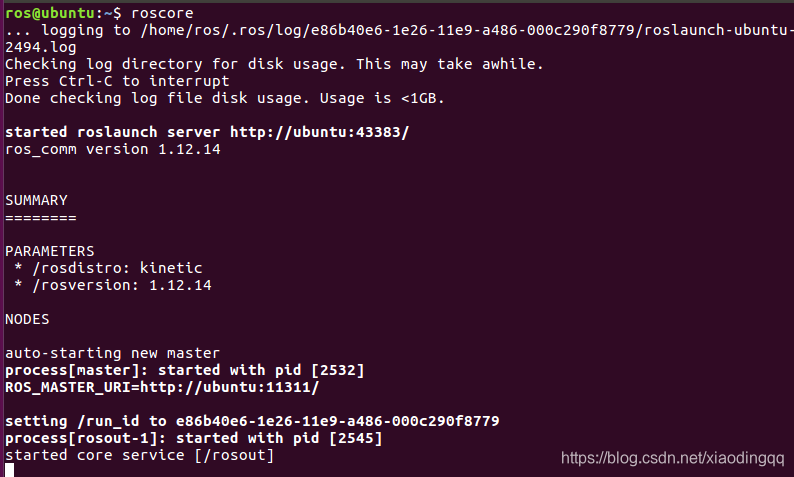

















&spm=1001.2101.3001.5002&articleId=86584109&d=1&t=3&u=9764b330f3dd4b73b8f07b1e21ecf00d)
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










