



摘要:
增强现实技术(AR)已经被认为是一种潜在的技术,可以帮助学生将他们在现实世界中观察到的东西与他们之前的知识联系起来。基于ar的学习中最具挑战性的问题之一是提供有效的策略,以帮助学生关注他们在该领域需要观察的内容。在本研究中,提出了一种竞争性游戏方法来支持在现实环境中进行的基于ar的学习活动。在一个小学生态学课程上进行了一个实验,以探讨该方法与传统的基于ar的移动学习方法在实地考察中的有效性。实验结果表明,基于ar的游戏方法不仅可以提高学生的学习态度,还可以提高学生在实地考察中的学习表现。并对今后的工作进行了讨论和一些建议。
为了评价该方法的性能,在小学生态学课程中进行了实验,探讨以下研究问题:
(1)基于增强现实(AR)的手机游戏能否提高学生在手机学习活动中的学习态度?
(2)基于ar的手机游戏能否提高学生在手机学习活动中的学习表现?
开发一个基于ar的竞争游戏:
在本研究中,真实的学习环境是一个由10个蝴蝶生态互动学习环境1897个区域组成的蝴蝶花园,其中饲养不同种类的蝴蝶及其寄主植物。通过在每个学习目标(即蝴蝶生态区域)安装二维码标签,在花园中建立无线通信网络,建立了一个位置感知位置的真实学习环境。在这种环境下学习时,每个学生都拿着一部配有摄像头的智能手机,学习系统能够检测到学生的位置,引导他们找到目标生态区域,并向他们展示相应的学习任务或相关的学习材料。
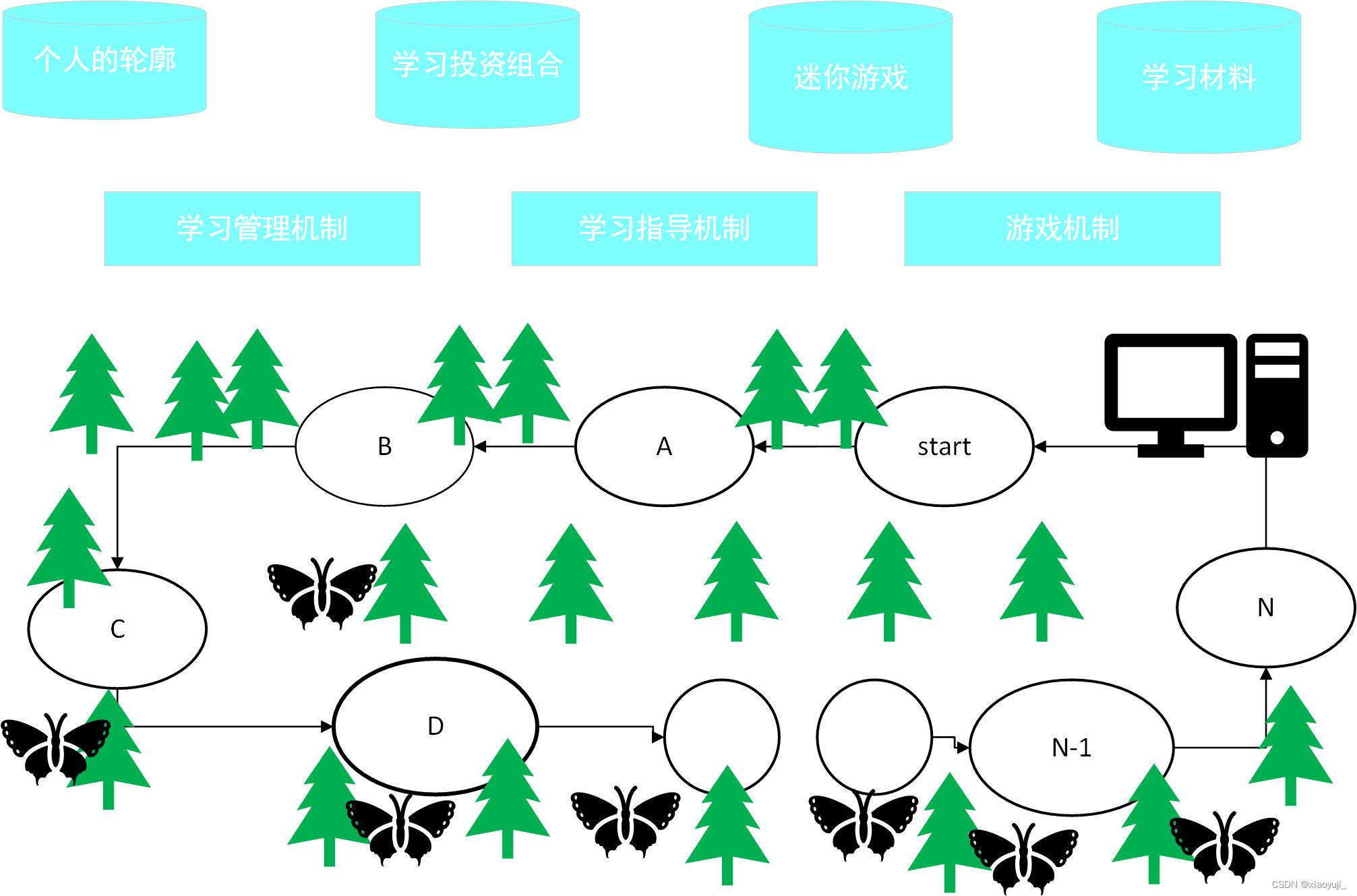
这个游戏机制是用来根据玩家的游戏状态来计算他们的分数的。例如,在第一次、第二次和第三次游戏中正确回答了一个问题的玩家将分别获得满分、半分和无分。
实验设计:
为了评估该方法的有效性,我们通过实验比较了使用ar手机游戏学习的学生和使用ar手机学习方法学习的学生的学习结果。真正的学习环境是位于台湾南部的一个蝴蝶生态花园。实地学习活动是所选学校的常规自然科学课程的一部分。它旨在帮助学生了解蝴蝶的生态学,包括不同种类蝴蝶的生长周期、外观特征、天敌和寄主植物。
参与者:
由同一位老师教授的两个五年级学生。他们的平均年龄是11岁。随机选择一组作为实验组(n = 30),另一组为对照组(n = 27)。
图4显示了实验的过程。在第一阶段,两组学生都学习了黄油生态学的基本知识,并接受了操作基于ar的移动学习系统的指导。随后,学生在参加实地考察前,在30分钟内完成预测,完成预问卷调查,分析他们对蝴蝶生态学的知识和态度。
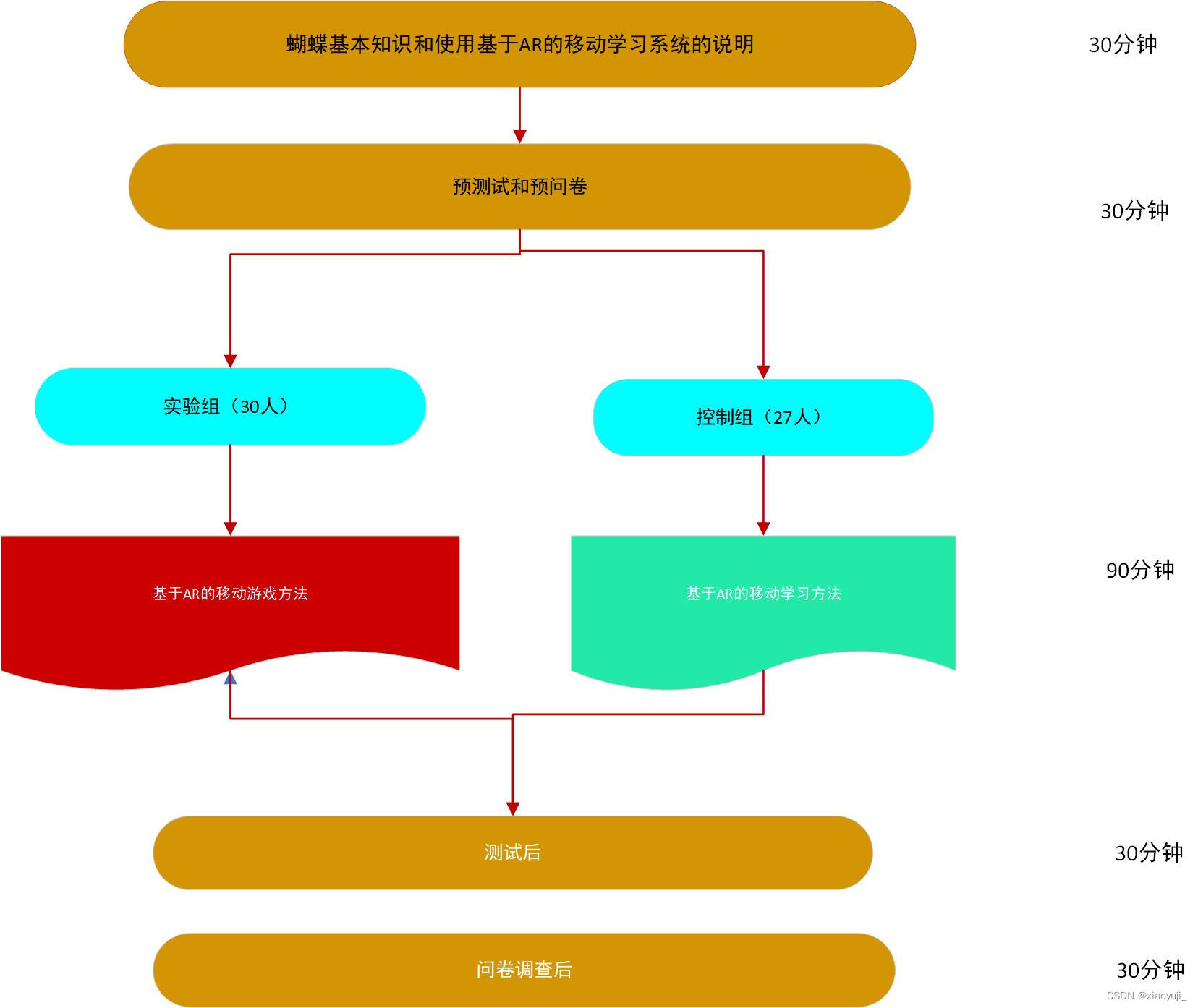 第二阶段,安排实验组学生在蝴蝶生态园学习基于ar的手机游戏。另一方面,对照组的学生采用基于AR的移动学习系统进行学习;即采用AR技术的移动学习系统,观察学习目标(如蝴蝶的寄主植物、蝴蝶的不同生长阶段以及植物与蝴蝶之间的关系),完成蝴蝶生态园的学习任务。对照组的学生在不能正确回答一些问题时,也可以获得补充材料,并获得系统的学习指导。学习活动持续了90分钟。学习活动结束后,两组学生都进行了后测;此外,他们被要求填写后问卷,以衡量他们态度可能发生的变化。
第二阶段,安排实验组学生在蝴蝶生态园学习基于ar的手机游戏。另一方面,对照组的学生采用基于AR的移动学习系统进行学习;即采用AR技术的移动学习系统,观察学习目标(如蝴蝶的寄主植物、蝴蝶的不同生长阶段以及植物与蝴蝶之间的关系),完成蝴蝶生态园的学习任务。对照组的学生在不能正确回答一些问题时,也可以获得补充材料,并获得系统的学习指导。学习活动持续了90分钟。学习活动结束后,两组学生都进行了后测;此外,他们被要求填写后问卷,以衡量他们态度可能发生的变化。
实验结果:学习成果
本研究的目的之一是检验所提出的方法在提高学生的学习成绩方面的有效性。使用了ANCOVA,见图4。实验程序,交互学习环境1901以两组的前验分数作为协变量,后测分数作为因变量,排除先验知识的差异。同质性检验结果显示,两组的后测得分均均匀(F = 1.99,p = .16 > .05),说明可以应用ANCOVA。表1总结了ANCOVA结果,实验组校正后的平均值为50.76,对照组为44.31;F = 2.24和p < .05两组之间有显著差异,说明该方法对学生的学习成绩有显著的积极影响。
表1.试验后结果的描述性数据和ANCOVA。
| 分组 | 数量 | 平均数 | 标准偏差 | 调整后平均数 | 标准误差 | F |
| 实验组 | 30 | 51.7 | 9.187 | 50.8 | 0.668 | 2.678 |
| 对照组 | 27 | 44.68 | 7.829 | 45.28 | 0.248 |
表2.学习活动结束后,学生对科学学习的态度的t检验结果。
| 分组 | 数量 | 平均数 | 标准偏差 | t |
| 实验组 | 27 | 4.37 | 0.912 | 1.348 |
| 对照组 | 23 | 4.019 | 0.957 |
游戏方法比基于ar的手机学习方法更能提高学生的学习态度。这一发现与之前的几项研究一致,即游戏策略的引入可能有利于提高学生的学习态度和学习成绩。
综上所述,本研究的主要贡献是提出了基于ar的游戏方法来支持现场移动学习活动,并通过一个实验展示了该方法的有效性。除了提出的方法的有效性,其中一个主要贡献是该方法可以应用于其他领域,通过替代游戏任务和补充材料,而不影响游戏的享受能力。对于打算将竞争游戏方法应用于其他基于ar的现场活动的研究人员或教师,建议采用三步学习设计程序: (1)选择需要学生在现实环境中进行探索或观察的活动;(2)为竞争游戏准备一组与现实环境相关的问题;(3)确定每个基于ar的活动的位置和内容。由于本文使用的QRcode技术是当前AR技术中一种成熟的方法,在未来的研究中,值得尝试无标记跟踪技术在实地考察中提供更自然的交互。
问题:
1.标准偏差跟标准误差性质相同吗?
2.VR与AR的区别
①VR=虚拟世界
②AR=真实世界 + 数字化信息
3.无标记跟踪技术在实地考察中提供的交互(方向)


















 928
928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










