




 本文详细介绍了如何使用STM32最小核心板通过HAL库实现CAN接口通讯,包括配置CAN1接口,设置过滤器,以及发送和接收数据帧。
本文详细介绍了如何使用STM32最小核心板通过HAL库实现CAN接口通讯,包括配置CAN1接口,设置过滤器,以及发送和接收数据帧。

这里使用了CAN1的接口,具体使用MX创建项目就不放了
需要注意的是,由于是最小核心没有CAN的收发模块需要外接一个
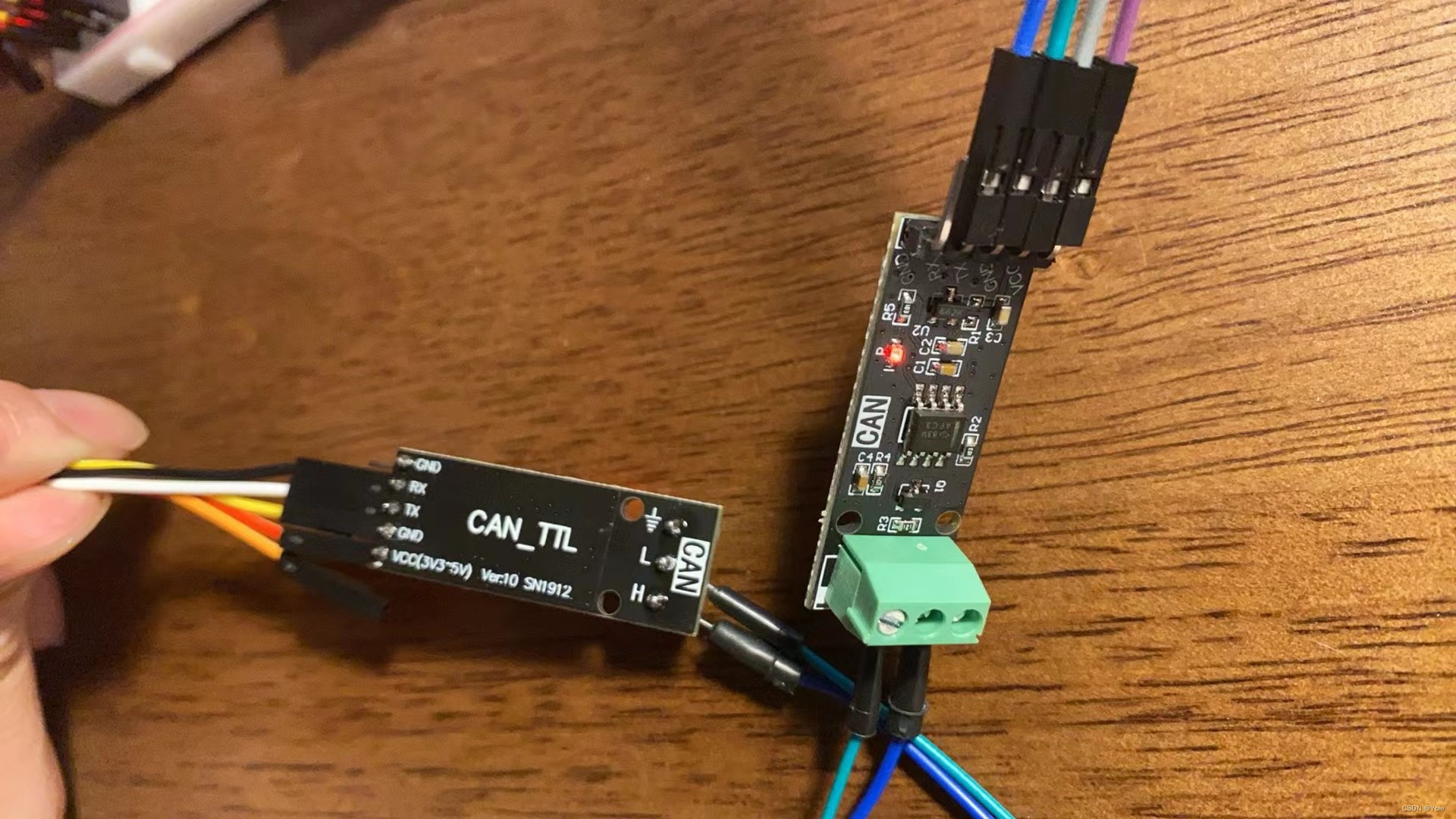
STM32核心板接CAN收发模块不需要交叉
/**CAN GPIO Configuration
PA11 ------> CAN_RX
PA12 ------> CAN_TX
*/CAN收发模块的H、L接线不需要交叉
接口的关键代码配置如下:
void MX_CAN_Init(void)
{
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 6;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_3TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan1.Init.TimeTriggeredMode = ENABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp


















 5736
5736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










