Given a set of cities and distance between every pair of cities, the problem is to find the shortest possible tour that visits every city exactly once and returns to the starting point.
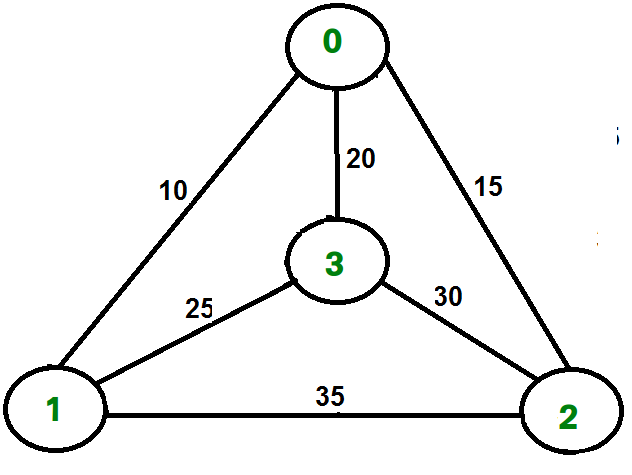
For example, consider the graph shown in figure on right side. A TSP tour in the graph is 0-1-3-2-0. The cost of the tour is 10+25+30+15 which is 80.
We have discussed following solutions
1) Naive and Dynamic Programming
2) Approximate solution using MST
Branch and Bound Solution for TSP
In the Branch and Bound method, we explore the solution space as a state space tree where each node represents a partial tour. For every node, we compute a bound on the best possible solution that can be obtained from that node. If this bound is greater than the best solution found so far, the subtree rooted at that node is ignored (pruned) because it cannot produce a better solution.
Cost Components of a Node
The total cost associated with a node consists of two parts
- Cost of reaching the node from the root, This is the cost of the edges already included in the partial tour.
- Estimated cost to complete the tour from the current node, This is computed using a lower bound on the remaining edges.
For a minimization problem like the Travelling Salesman Problem, we compute a lower bound.
This lower bound represents the minimum possible cost of completing the tour from the current node.
Lower Bound Calculation using Cost Matrix Reduction
To compute the lower bound efficiently, we use matrix reduction.
Row Reduction
For each row of the cost matrix
- Find the minimum value in that row.
- Subtract it from all elements of that row.
- Add the subtracted value to the reduction cost.
Column Reduction
For each column
- Find the minimum value in that column.
- Subtract it from all elements of that column.
- Add the subtracted value to the reduction cost.
The sum of all reductions gives a lower bound on the cost of completing the tour.
State Space Tree Expansion
The algorithm constructs a state space tree where
- Each level represents a city added to the partial tour.
- Each node stores the reduced cost matrix, the current cost (lower bound), the current city, and the path taken so far.
A priority queue (min-heap) is used so that the node with the smallest lower bound is expanded first.
Creating Child Nodes
When moving from city i → j:
- The row of city i is set to ∞ (cannot leave again).
- The column of city j is set to ∞ (cannot revisit).
- The edge j → start may also be restricted until the last level.
- The matrix is reduced again to compute a new lower bound.
The new node cost becomes:
New Cost = Parent Cost + Edge Cost(i, j) + Reduction Cost of new matrix
Pruning Condition
If Node Cost ≥ Best Tour Cost Found, then the node (subtree) is pruned, because it cannot produce a better solution.
Note: When a node reaches level n-1 (all cities visited), the algorithm adds the edge back to the starting city to complete the tour.
The tour with the minimum cost among all possible tours explored is returned as the optimal solution.
//Driver Code Starts
#include <iostream>
#include <vector>
#include <queue>
#include <algorithm>
using namespace std;
//Driver Code Ends
// large value used to represent no edge
const int inf = 1e9;
// structure representing a node in the state space tree
struct node {
// reduced cost matrix
vector<vector<int>> matrix;
// lower bound cost of this node
int cost;
// current city
int vertex;
// number of cities visited so far
int level;
// path taken to reach this node
vector<int> path;
node(int n = 0) {
matrix.assign(n, vector<int>(n, inf));
cost = 0;
vertex = 0;
level = 0;
}
};
// reduce rows and columns of matrix, return total reduction cost
int reducematrix(vector<vector<int>> &mat) {
int n = mat.size();
int reduction = 0;
// row reduction
for (int i = 0; i < n; i++) {
int rowmin = inf;
// find minimum value in the row
for (int j = 0; j < n; j++)
rowmin = min(rowmin, mat[i][j]);
// subtract row minimum from all elements of that row
if (rowmin != inf && rowmin > 0) {
reduction += rowmin;
for (int j = 0; j < n; j++)
if (mat[i][j] != inf)
mat[i][j] -= rowmin;
}
}
// column reduction
for (int j = 0; j < n; j++) {
int colmin = inf;
// find minimum value in the column
for (int i = 0; i < n; i++)
colmin = min(colmin, mat[i][j]);
// subtract column minimum from all elements of that column
if (colmin != inf && colmin > 0) {
reduction += colmin;
for (int i = 0; i < n; i++)
if (mat[i][j] != inf)
mat[i][j] -= colmin;
}
}
// return total reduction cost which contributes to lower bound
return reduction;
}
// create a child node after moving from one city to another
node createchild(const node &parent, int from, int to) {
int n = parent.matrix.size();
node child(n);
// copy parent reduced matrix
child.matrix = parent.matrix;
// disable all outgoing edges from current city
for (int j = 0; j < n; j++)
child.matrix[from][j] = inf;
// disable all incoming edges to the next city
for (int i = 0; i < n; i++)
child.matrix[i][to] = inf;
// cost of edge used for transition
int edgecost = parent.matrix[from][to];
// new cost includes parent cost and edge cost
child.cost = parent.cost + edgecost;
// perform reduction on the new matrix
int reduction = reducematrix(child.matrix);
// add reduction cost to obtain lower bound
child.cost += reduction;
// update node information
child.vertex = to;
child.level = parent.level + 1;
// copy path and append new city
child.path = parent.path;
child.path.push_back(to);
return child;
};
// comparison for selecting minimum cost node
struct comparenode {
// priority queue selects node with minimum cost
bool operator()(const node &a, const node &b) const {
return a.cost > b.cost;
}
};
// solve tsp using branch and bound
pair<int, vector<int>> solvetsp(const vector<vector<int>> &costmatrix) {
int n = costmatrix.size();
// create root node
node root(n);
root.matrix = costmatrix;
root.vertex = 0;
root.level = 0;
// starting city
root.path.push_back(0);
// compute initial reduction
root.cost = reducematrix(root.matrix);
// priority queue to select node with smallest bound
priority_queue<node, vector<node>, comparenode> pq;
pq.push(root);
int bestcost = inf;
vector<int> bestpath;
// explore nodes until queue becomes empty
while (!pq.empty()) {
node cur = pq.top();
pq.pop();
// prune nodes whose bound is already worse
if (cur.cost >= bestcost)
continue;
// if all cities are visited
if (cur.level == n - 1) {
// cost to return to starting city
int finaledge = cur.matrix[cur.vertex][0];
if (finaledge == inf)
continue;
int totalcost = cur.cost + finaledge;
// update best solution
if (totalcost < bestcost) {
bestcost = totalcost;
bestpath = cur.path;
bestpath.push_back(0);
}
continue;
}
// expand current node to all possible next cities
for (int j = 0; j < n; j++) {
if (cur.matrix[cur.vertex][j] != inf) {
bool visited = false;
// check if city already visited
for (int v : cur.path)
if (v == j)
visited = true;
if (visited)
continue;
// create child node
node child = createchild(cur, cur.vertex, j);
// push only promising nodes
if (child.cost < bestcost)
pq.push(child);
}
}
}
return {bestcost, bestpath};
}
//Driver Code Starts
// driver code
int main() {
// example cost matrix for 5 cities
vector<vector<int>> costmatrix = {
{0, 72, 184, 136, 115},
{72, 0, 143, 180, 58},
{184, 143, 0, 23, 182},
{136, 180, 23, 0, 156},
{115, 58, 182, 156, 0}
};
auto result = solvetsp(costmatrix);
int bestcost = result.first;
vector<int> path = result.second;
if (bestcost >= inf) {
cout << "No Hamiltonian cycle found
";
} else {
cout << "Minimum cost: " << bestcost << "
";
cout << "Path: ";
for (int i = 0; i < path.size(); i++) {
cout << path[i];
if (i + 1 < path.size())
cout << " ";
}
cout << "
";
}
return 0;
}
//Driver Code Ends
//Driver Code Starts
import java.util.ArrayList;
import java.util.PriorityQueue;
import java.util.Comparator;
class GfG {
//Driver Code Ends
// large value used to represent no edge
static final int inf = (int)1e9;
// structure representing a node in the state space tree
static class node {
// reduced cost matrix
ArrayList<ArrayList<Integer>> matrix;
// lower bound cost of this node
int cost;
// current city
int vertex;
// number of cities visited so far
int level;
// path taken to reach this node
ArrayList<Integer> path;
node(int n) {
matrix = new ArrayList<>();
for (int i = 0; i < n; i++) {
ArrayList<Integer> row = new ArrayList<>();
for (int j = 0; j < n; j++)
row.add(inf);
matrix.add(row);
}
cost = 0;
vertex = 0;
level = 0;
path = new ArrayList<>();
}
}
// reduce rows and columns of matrix, return total reduction cost
static int reducematrix(ArrayList<ArrayList<Integer>> mat) {
int n = mat.size();
int reduction = 0;
// row reduction
for (int i = 0; i < n; i++) {
int rowmin = inf;
// find minimum value in the row
for (int j = 0; j < n; j++)
rowmin = Math.min(rowmin, mat.get(i).get(j));
// subtract row minimum from all elements of that row
if (rowmin != inf && rowmin > 0) {
reduction += rowmin;
for (int j = 0; j < n; j++)
if (mat.get(i).get(j) != inf)
mat.get(i).set(j, mat.get(i).get(j) - rowmin);
}
}
// column reduction
for (int j = 0; j < n; j++) {
int colmin = inf;
// find minimum value in the column
for (int i = 0; i < n; i++)
colmin = Math.min(colmin, mat.get(i).get(j));
// subtract column minimum from all elements of that column
if (colmin != inf && colmin > 0) {
reduction += colmin;
for (int i = 0; i < n; i++)
if (mat.get(i).get(j) != inf)
mat.get(i).set(j, mat.get(i).get(j) - colmin);
}
}
// return total reduction cost which contributes to lower bound
return reduction;
}
// create a child node after moving from one city to another
static node createchild(node parent, int from, int to) {
int n = parent.matrix.size();
node child = new node(n);
// copy parent reduced matrix
for (int i = 0; i < n; i++)
child.matrix.set(i, new ArrayList<>(parent.matrix.get(i)));
// disable all outgoing edges from current city
for (int j = 0; j < n; j++)
child.matrix.get(from).set(j, inf);
// disable all incoming edges to the next city
for (int i = 0; i < n; i++)
child.matrix.get(i).set(to, inf);
// cost of edge used for transition
int edgecost = parent.matrix.get(from).get(to);
// new cost includes parent cost and edge cost
child.cost = parent.cost + edgecost;
// perform reduction on the new matrix
int reduction = reducematrix(child.matrix);
// add reduction cost to obtain lower bound
child.cost += reduction;
// update node information
child.vertex = to;
child.level = parent.level + 1;
// copy path and append new city
child.path = new ArrayList<>(parent.path);
child.path.add(to);
return child;
}
// comparison for selecting minimum cost node
static class comparenode implements Comparator<node> {
// priority queue selects node with minimum cost
public int compare(node a, node b) {
return a.cost - b.cost;
}
}
// solve tsp using branch and bound
static Pair solvetsp(int[][] costmatrix) {
int n = costmatrix.length;
// create root node
node root = new node(n);
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
root.matrix.get(i).set(j, costmatrix[i][j]);
root.vertex = 0;
root.level = 0;
// starting city
root.path.add(0);
// compute initial reduction
root.cost = reducematrix(root.matrix);
// priority queue to select node with smallest bound
PriorityQueue<node> pq = new PriorityQueue<>(new comparenode());
pq.add(root);
int bestcost = inf;
ArrayList<Integer> bestpath = new ArrayList<>();
// explore nodes until queue becomes empty
while (!pq.isEmpty()) {
node cur = pq.poll();
// prune nodes whose bound is already worse
if (cur.cost >= bestcost)
continue;
// if all cities are visited
if (cur.level == n - 1) {
// cost to return to starting city
int finaledge = cur.matrix.get(cur.vertex).get(0);
if (finaledge == inf)
continue;
int totalcost = cur.cost + finaledge;
// update best solution
if (totalcost < bestcost) {
bestcost = totalcost;
bestpath = new ArrayList<>(cur.path);
bestpath.add(0);
}
continue;
}
// expand current node to all possible next cities
for (int j = 0; j < n; j++) {
if (cur.matrix.get(cur.vertex).get(j) != inf) {
boolean visited = false;
// check if city already visited
for (int v : cur.path)
if (v == j)
visited = true;
if (visited)
continue;
// create child node
node child = createchild(cur, cur.vertex, j);
// push only promising nodes
if (child.cost < bestcost)
pq.add(child);
}
}
}
return new Pair(bestcost, bestpath);
}
static class Pair {
int cost;
ArrayList<Integer> path;
Pair(int c, ArrayList<Integer> p) {
cost = c;
path = p;
}
}
//Driver Code Starts
// driver code
public static void main(String[] args) {
int[][] costmatrix = {
{0,72,184,136,115},
{72,0,143,180,58},
{184,143,0,23,182},
{136,180,23,0,156},
{115,58,182,156,0}
};
Pair result = solvetsp(costmatrix);
int bestcost = result.cost;
ArrayList<Integer> path = result.path;
if (bestcost >= inf) {
System.out.println("No Hamiltonian cycle found");
} else {
System.out.println("Minimum cost: " + bestcost);
System.out.print("Path: ");
for (int i = 0; i < path.size(); i++) {
System.out.print(path.get(i));
if (i + 1 < path.size())
System.out.print(" ");
}
System.out.println();
}
}
}
//Driver Code Ends
#Driver Code Starts
import heapq
#Driver Code Ends
# large value used to represent no edge
inf = 10**9
# structure representing a node in the state space tree
class Node:
def __init__(self, n=0):
# reduced cost matrix
self.matrix = [[inf] * n for _ in range(n)]
# lower bound cost of this node
self.cost = 0
# current city
self.vertex = 0
# number of cities visited so far
self.level = 0
# path taken to reach this node
self.path = []
def __lt__(self, other):
return self.cost < other.cost
# reduce rows and columns of matrix, return total reduction cost
def reduce_matrix(mat):
n = len(mat)
reduction = 0
# row reduction
for i in range(n):
row_min = min(mat[i])
# subtract row minimum from all elements of that row
if row_min != inf and row_min > 0:
reduction += row_min
for j in range(n):
if mat[i][j] != inf:
mat[i][j] -= row_min
# column reduction
for j in range(n):
col_min = min(mat[i][j] for i in range(n))
# subtract column minimum from all elements of that column
if col_min != inf and col_min > 0:
reduction += col_min
for i in range(n):
if mat[i][j] != inf:
mat[i][j] -= col_min
# return total reduction cost which contributes to lower bound
return reduction
# create a child node after moving from one city to another
def create_child(parent, from_city, to):
n = len(parent.matrix)
child = Node(n)
# copy parent reduced matrix
child.matrix = [row[:] for row in parent.matrix]
# disable all outgoing edges from current city
for j in range(n):
child.matrix[from_city][j] = inf
# disable all incoming edges to the next city
for i in range(n):
child.matrix[i][to] = inf
# cost of edge used for transition
edge_cost = parent.matrix[from_city][to]
# new cost includes parent cost and edge cost
child.cost = parent.cost + edge_cost
# perform reduction on the new matrix
reduction = reduce_matrix(child.matrix)
# add reduction cost to obtain lower bound
child.cost += reduction
# update node information
child.vertex = to
child.level = parent.level + 1
# copy path and append new city
child.path = parent.path[:]
child.path.append(to)
return child
# solve tsp using branch and bound
def solve_tsp(cost_matrix):
n = len(cost_matrix)
# create root node
root = Node(n)
root.matrix = [row[:] for row in cost_matrix]
root.vertex = 0
root.level = 0
# starting city
root.path.append(0)
# compute initial reduction
root.cost = reduce_matrix(root.matrix)
# priority queue to select node with smallest bound
pq = []
heapq.heappush(pq, root)
best_cost = inf
best_path = []
# explore nodes until queue becomes empty
while pq:
cur = heapq.heappop(pq)
# prune nodes whose bound is already worse
if cur.cost >= best_cost:
continue
# if all cities are visited
if cur.level == n - 1:
# cost to return to starting city
final_edge = cur.matrix[cur.vertex][0]
if final_edge == inf:
continue
total_cost = cur.cost + final_edge
# update best solution
if total_cost < best_cost:
best_cost = total_cost
best_path = cur.path[:]
best_path.append(0)
continue
# expand current node to all possible next cities
for j in range(n):
if cur.matrix[cur.vertex][j] != inf:
visited = j in cur.path
if visited:
continue
# create child node
child = create_child(cur, cur.vertex, j)
# push only promising nodes
if child.cost < best_cost:
heapq.heappush(pq, child)
return best_cost, best_path
if __name__=="__main__":
#Driver Code Starts
cost_matrix = [
[0, 72, 184, 136, 115],
[72, 0, 143, 180, 58],
[184, 143, 0, 23, 182],
[136, 180, 23, 0, 156],
[115, 58, 182, 156, 0]
]
best_cost, path = solve_tsp(cost_matrix)
if best_cost >= inf:
print("No Hamiltonian cycle found")
else:
print("Minimum cost:", best_cost)
print("Path:", " ".join(map(str, path)))
#Driver Code Ends
//Driver Code Starts
using System;
using System.Collections.Generic;
using System.Linq;
class GfG
{
//Driver Code Ends
// large value used to represent no edge
private const int inf = 1_000_000_000;
// structure representing a node in the state space tree
class Node
{
// reduced cost matrix
public List<List<int>> Matrix { get; set; }
// lower bound cost of this node
public int Cost { get; set; }
// current city
public int Vertex { get; set; }
// number of cities visited so far
public int Level { get; set; }
// path taken to reach this node
public List<int> Path { get; set; }
public Node(int n = 0)
{
Matrix = new List<List<int>>(n);
for (int i = 0; i < n; i++)
{
Matrix.Add(Enumerable.Repeat(inf, n).ToList());
}
Cost = 0;
Vertex = 0;
Level = 0;
Path = new List<int>();
}
}
// reduce rows and columns of matrix, return total reduction cost
static int ReduceMatrix(List<List<int>> mat)
{
int n = mat.Count;
int reduction = 0;
// row reduction
for (int i = 0; i < n; i++)
{
int rowMin = inf;
// find minimum value in the row
for (int j = 0; j < n; j++)
rowMin = Math.Min(rowMin, mat[i][j]);
// subtract row minimum from all elements of that row
if (rowMin != inf && rowMin > 0)
{
reduction += rowMin;
for (int j = 0; j < n; j++)
if (mat[i][j] != inf)
mat[i][j] -= rowMin;
}
}
// column reduction
for (int j = 0; j < n; j++)
{
int colMin = inf;
// find minimum value in the column
for (int i = 0; i < n; i++)
colMin = Math.Min(colMin, mat[i][j]);
// subtract column minimum from all elements of that column
if (colMin != inf && colMin > 0)
{
reduction += colMin;
for (int i = 0; i < n; i++)
if (mat[i][j] != inf)
mat[i][j] -= colMin;
}
}
// return total reduction cost which contributes to lower bound
return reduction;
}
// create a child node after moving from one city to another
static Node CreateChild(Node parent, int fromCity, int toCity)
{
int n = parent.Matrix.Count;
Node child = new Node(n);
// copy parent reduced matrix
child.Matrix = parent.Matrix.Select(row => new List<int>(row)).ToList();
// disable all outgoing edges from current city
for (int j = 0; j < n; j++)
child.Matrix[fromCity][j] = inf;
// disable all incoming edges to the next city
for (int i = 0; i < n; i++)
child.Matrix[i][toCity] = inf;
// cost of edge used for transition
int edgeCost = parent.Matrix[fromCity][toCity];
// new cost includes parent cost and edge cost
child.Cost = parent.Cost + edgeCost;
// perform reduction on the new matrix
int reduction = ReduceMatrix(child.Matrix);
// add reduction cost to obtain lower bound
child.Cost += reduction;
// update node information
child.Vertex = toCity;
child.Level = parent.Level + 1;
// copy path and append new city
child.Path = new List<int>(parent.Path) { toCity };
return child;
}
// solve tsp using branch and bound
static (int bestCost, List<int> bestPath) SolveTSP(List<List<int>> costMatrix)
{
int n = costMatrix.Count;
// create root node
Node root = new Node(n);
root.Matrix = costMatrix.Select(row => new List<int>(row)).ToList();
root.Vertex = 0;
root.Level = 0;
// starting city
root.Path.Add(0);
// compute initial reduction
root.Cost = ReduceMatrix(root.Matrix);
// priority queue to select node with smallest bound (using .NET 6+ PriorityQueue)
var pq = new PriorityQueue<Node, int>();
pq.Enqueue(root, root.Cost);
int bestCost = inf;
List<int> bestPath = new List<int>();
// explore nodes until queue becomes empty
while (pq.Count > 0)
{
Node cur = pq.Dequeue();
// prune nodes whose bound is already worse
if (cur.Cost >= bestCost)
continue;
// if all cities are visited
if (cur.Level == n - 1)
{
// cost to return to starting city
int finalEdge = cur.Matrix[cur.Vertex][0];
if (finalEdge == inf)
continue;
int totalCost = cur.Cost + finalEdge;
// update best solution
if (totalCost < bestCost)
{
bestCost = totalCost;
bestPath = new List<int>(cur.Path) { 0 };
}
continue;
}
// expand current node to all possible next cities
for (int j = 0; j < n; j++)
{
if (cur.Matrix[cur.Vertex][j] != inf)
{
bool visited = false;
// check if city already visited
foreach (int v in cur.Path)
if (v == j)
visited = true;
if (visited)
continue;
// create child node
Node child = CreateChild(cur, cur.Vertex, j);
// push only promising nodes
if (child.Cost < bestCost)
pq.Enqueue(child, child.Cost);
}
}
}
return (bestCost, bestPath);
}
//Driver Code Starts
// driver code
static void Main()
{
// example cost matrix for 5 cities
List<List<int>> costMatrix = new List<List<int>>
{
new List<int> {0, 72, 184, 136, 115},
new List<int> {72, 0, 143, 180, 58},
new List<int> {184, 143, 0, 23, 182},
new List<int> {136, 180, 23, 0, 156},
new List<int> {115, 58, 182, 156, 0}
};
var result = SolveTSP(costMatrix);
int bestCost = result.bestCost;
List<int> path = result.bestPath;
if (bestCost >= inf)
{
Console.WriteLine("No Hamiltonian cycle found");
}
else
{
Console.WriteLine("Minimum cost: " + bestCost);
Console.Write("Path: ");
for (int i = 0; i < path.Count; i++)
{
Console.Write(path[i]);
if (i + 1 < path.Count)
Console.Write(" ");
}
Console.WriteLine();
}
}
}
//Driver Code Ends
// large value used to represent no edge
const inf = 1e9;
// structure representing a node in the state space tree
class Node {
constructor(n = 0) {
// reduced cost matrix
this.matrix = Array.from({ length: n }, () => Array(n).fill(inf));
// lower bound cost of this node
this.cost = 0;
// current city
this.vertex = 0;
// number of cities visited so far
this.level = 0;
// path taken to reach this node
this.path = [];
}
}
// simple min-heap implementation for nodes (based on cost)
class MinHeap {
constructor() {
this.heap = [];
}
push(node) {
this.heap.push(node);
this._siftUp(this.heap.length - 1);
}
pop() {
if (this.heap.length === 0) return null;
const top = this.heap[0];
const bottom = this.heap.pop();
if (this.heap.length > 0) {
this.heap[0] = bottom;
this._siftDown(0);
}
return top;
}
_siftUp(index) {
while (index > 0) {
const parent = Math.floor((index - 1) / 2);
if (this.heap[parent].cost <= this.heap[index].cost) break;
[this.heap[parent], this.heap[index]] = [this.heap[index], this.heap[parent]];
index = parent;
}
}
_siftDown(index) {
const length = this.heap.length;
while (true) {
let left = 2 * index + 1;
let right = 2 * index + 2;
let smallest = index;
if (left < length && this.heap[left].cost < this.heap[smallest].cost)
smallest = left;
if (right < length && this.heap[right].cost < this.heap[smallest].cost)
smallest = right;
if (smallest === index) break;
[this.heap[index], this.heap[smallest]] = [this.heap[smallest], this.heap[index]];
index = smallest;
}
}
size() {
return this.heap.length;
}
}
// reduce rows and columns of matrix, return total reduction cost
function reduceMatrix(mat) {
const n = mat.length;
let reduction = 0;
// row reduction
for (let i = 0; i < n; i++) {
let rowMin = inf;
// find minimum value in the row
for (let j = 0; j < n; j++)
rowMin = Math.min(rowMin, mat[i][j]);
// subtract row minimum from all elements of that row
if (rowMin !== inf && rowMin > 0) {
reduction += rowMin;
for (let j = 0; j < n; j++)
if (mat[i][j] !== inf)
mat[i][j] -= rowMin;
}
}
// column reduction
for (let j = 0; j < n; j++) {
let colMin = inf;
// find minimum value in the column
for (let i = 0; i < n; i++)
colMin = Math.min(colMin, mat[i][j]);
// subtract column minimum from all elements of that column
if (colMin !== inf && colMin > 0) {
reduction += colMin;
for (let i = 0; i < n; i++)
if (mat[i][j] !== inf)
mat[i][j] -= colMin;
}
}
// return total reduction cost which contributes to lower bound
return reduction;
}
// create a child node after moving from one city to another
function createChild(parent, fromCity, toCity) {
const n = parent.matrix.length;
const child = new Node(n);
// copy parent reduced matrix (deep copy)
child.matrix = parent.matrix.map(row => [...row]);
// disable all outgoing edges from current city
for (let j = 0; j < n; j++)
child.matrix[fromCity][j] = inf;
// disable all incoming edges to the next city
for (let i = 0; i < n; i++)
child.matrix[i][toCity] = inf;
// cost of edge used for transition
const edgeCost = parent.matrix[fromCity][toCity];
// new cost includes parent cost and edge cost
child.cost = parent.cost + edgeCost;
// perform reduction on the new matrix
const reduction = reduceMatrix(child.matrix);
// add reduction cost to obtain lower bound
child.cost += reduction;
// update node information
child.vertex = toCity;
child.level = parent.level + 1;
// copy path and append new city
child.path = [...parent.path, toCity];
return child;
}
// solve tsp using branch and bound
function solveTSP(costMatrix) {
const n = costMatrix.length;
// create root node
const root = new Node(n);
root.matrix = costMatrix.map(row => [...row]); // deep copy
root.vertex = 0;
root.level = 0;
// starting city
root.path.push(0);
// compute initial reduction
root.cost = reduceMatrix(root.matrix);
// priority queue to select node with smallest bound
const pq = new MinHeap();
pq.push(root);
let bestCost = inf;
let bestPath = [];
// explore nodes until queue becomes empty
while (pq.size() > 0) {
const cur = pq.pop();
// prune nodes whose bound is already worse
if (cur.cost >= bestCost)
continue;
// if all cities are visited
if (cur.level === n - 1) {
// cost to return to starting city
const finalEdge = cur.matrix[cur.vertex][0];
if (finalEdge === inf)
continue;
const totalCost = cur.cost + finalEdge;
// update best solution
if (totalCost < bestCost) {
bestCost = totalCost;
bestPath = [...cur.path, 0];
}
continue;
}
// expand current node to all possible next cities
for (let j = 0; j < n; j++) {
if (cur.matrix[cur.vertex][j] !== inf) {
// check if city already visited
if (cur.path.includes(j))
continue;
// create child node
const child = createChild(cur, cur.vertex, j);
// push only promising nodes
if (child.cost < bestCost)
pq.push(child);
}
}
}
return { bestCost, bestPath };
}
//Driver Code Starts
// Driver code
// example cost matrix for 5 cities
const costMatrix = [
[0, 72, 184, 136, 115],
[72, 0, 143, 180, 58],
[184, 143, 0, 23, 182],
[136, 180, 23, 0, 156],
[115, 58, 182, 156, 0]
];
const { bestCost, bestPath } = solveTSP(costMatrix);
if (bestCost >= inf) {
console.log("No Hamiltonian cycle found");
} else {
console.log("Minimum cost: " + bestCost);
console.log("Path: " + bestPath.join(" "));
}
//Driver Code Ends
Output :
Minimum cost : 80
Path Taken : 0 1 3 2 0
Complexity
- Worst-case Time Complexity:
O(n!) - Space Complexity:
Depends on the number of nodes stored in the priority queue.
