Mechanical systems exist in automobiles, robots, machines, manufacturing equipment and vibration control applications. Mathematical modelling represents mechanical motion using mathematical equations derived from physical laws. Such representation allows prediction of system response without performing repeated physical experiments.
- Mainly depends on Newton’s Laws of Motion.
- A mathematical model of a mechanical system describes the relation between the applied force or torque and the resulting motion parameters such as displacement, velocity and acceleration.
- Mathematical equations normally appear as differential equations, which later convert into transfer functions for control analysis.

Translational Mechanical System
A translational mechanical system represents motion along a straight line. An external force causes linear displacement of mass. Spring produces a restoring force while the damper generates frictional resistance. A combination of inertia, elasticity and damping defines dynamic behaviour. Common applications include vehicle suspension systems, vibration isolation systems and linear actuators.
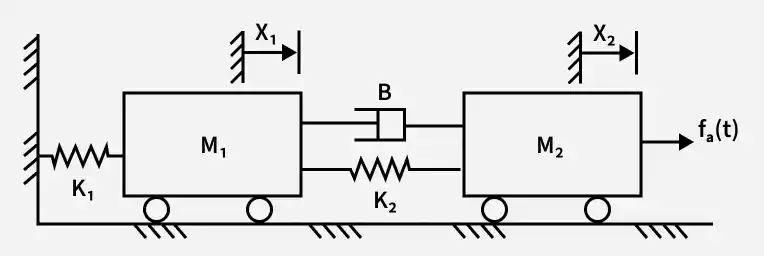
Mathematical Model Equation
Applying Newton’s Law:
Laplace Domain Representation:
Transfer Function:
Ms^2 : Represents the Inertial component (corresponding to the second derivative x).- Bs: Represents the Damping component (corresponding to the first derivative x).
- K: Represents the Stiffness component (the constant displacement x).
Rotational Mechanical System
Rotational mechanical system describes circular motion around fixed axis. Applied torque produces angular displacement. Rotational inertia stores kinetic energy while torsional spring and friction oppose motion. Applications include electric motors, turbines, robotic joints and gear drives.
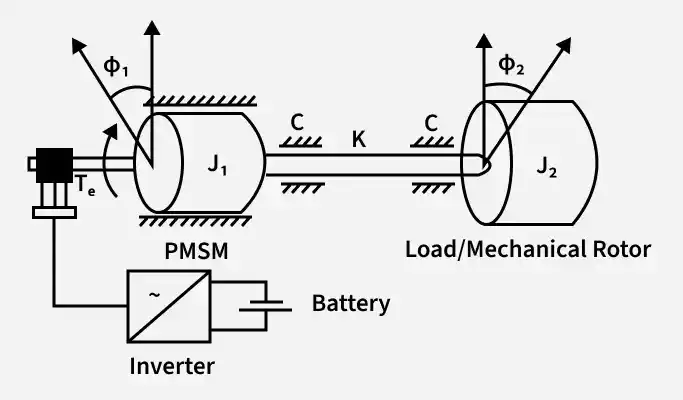
Mathematical Model Equation
Applying rotational form of Newton’s Law:
Laplace Representation
Tranfer Function
T(s) : The Laplace transform of the input Torque.\Theta(s) : The Laplace transform of the output Angular Displacement.Js^2 : The rotational inertia term (s^2 corresponds to the second derivative\ddot{\theta} ).Bs : The rotational damping term (s corresponds to the first derivative\dot{\theta} ).K : The torsional spring constant.
Analogy Between Translational and Rotational Systems
Translational Systems | Rotational Systems |
|---|---|
Mass (M) | Moment of Inertia (J) |
Force (F) | Torque (T) |
Displacement (x) | Angular Displacement (θ) |
Velocity | Angular Velocity |
Spring Constant (K) | Torsional Spring Constant |
Friction Coefficient (B) | Rotational Friction |
Advantages
- System behaviour can be predicted before practical implementation, reducing experimental effort.
- Stability, transient response, and steady-state performance become easier to evaluate.
- Control system design becomes systematic using transfer functions and differential equations.
- Time and cost required for prototype development significantly decrease.
- Model-based analysis helps engineers select proper system parameters for desired performance.
