




一、机构自由度定义
在机械原理中,机构自由度(Degree of Freedom, DOF) 指的是机构中所有构件相对于固定构件(机架)能够实现的独立运动的数目。
机构的本质是“能实现预定运动的构件组合”,而自由度正是衡量这种“运动独立性”的核心指标。对于串联机器人来讲,自由度就是末端执行器相对于基座的自由度;而对于并联机器人,动平台相对于静平台的自由度即为机构的自由度。
我们知道一个空间中的构件,最多有3移3转的6自由度,但是机器人机构为满足更为复杂或精密的任务时,往往有不同的自由度设计。比如可以实现空间中任意特定运动的六自由度机构,就是满自由度机构;机构自由度数大于6时被称为冗余机构,小于6时称为欠自由度机构。
自由度的意义就在于:当机构的自由度大于0,并且机构的主动构件数与机构自由度数相等时,这个机构就有了确定的运动。
二、自由度计算方法
1.利用CGK公式计算自由度
机构自由度的计算依赖以下Chebyshev-Grübler-Kutzbach(CGK)公式:
式中: 为机构的阶数,平面机构为3,空间机构则为6;
为连杆数(包括基座);
为关节的总数;
为第
个关节对应的自由度(如转动副
、移动副
的
;圆柱副
、虎克铰
的
;球面副
的
)。
例1:以计算下面典型平面四杆机构自由度为例
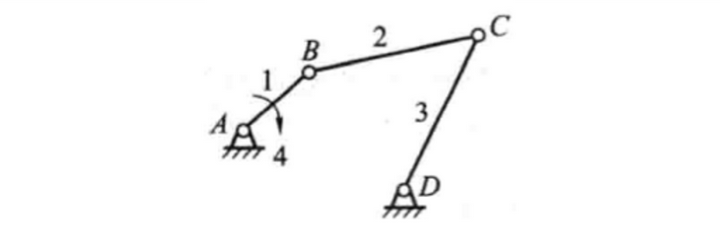
图1
这是一个平面机构,因此 ,图1中将构件全部标记共有4个,关节总数为
,
,最终代入CGK公式自由度为1。也就是说只需要驱动1构件,就能让机构有确定的运动。
例2:计算空间Strwart机构的自由度

图2
这是一个空间机构,因此 ;图2中Stewart机构有18个关节(每条支链有2个S副和1个P副),14个连杆(每条支链有2个连杆,整个机构有1个动平台、1个基座),18个关节共有42个自由度(每条支链的自由度为3+1+3=7)。
综上: 最终代入CGK公式自由度为12。但实际上这一典型并联机构的自由度只有6,这时候就要提到下面的内容局部自由度了,也就是说不是所有机构都适用于上面的CGK公式,下面说明注意事项。
2.利用修正CGK公式计算
▲需要注意的是,当机构出现复合铰链、局部自由度和虚约束时,需要采用修正后的CGK公式:
式中: 为机构虚约束数,
为机构的局部自由度数。上式可以用于统一计算机构自由度的公式,特别需要判断好虚约束等情况。
1)复合铰链
也就是两个及以上的构件在同一处构成的转动副称复合铰链,由n个构件汇集得到的复合铰链就应包含个转动副。
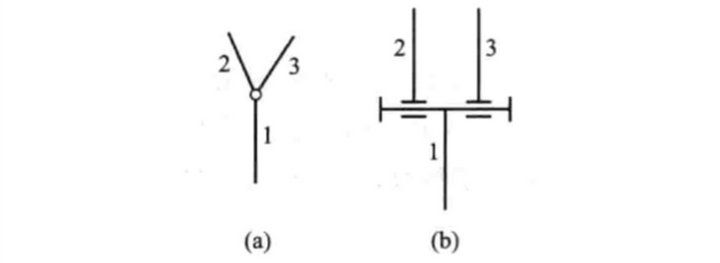
图3
上图3a就是这种情况的简图,b就是实际的连接情况。
例3:存在复合铰链的平面机构
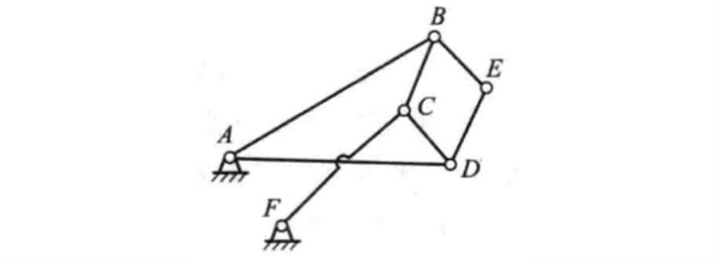
图4
上图4机构中共有AB、BC、CD、DE、BE、AD、CF与机架共8个构件;在A、B、C、D四处存在复合铰链,均为 3构件复合,视为3-1=2个转动副;
带入修正后的公式: 即为1个自由度。
2)局部自由度
存在于局部、不影响其他构件尤其是输出构件运动的自由度称为局部自由度或消极自由度,如图5所示:
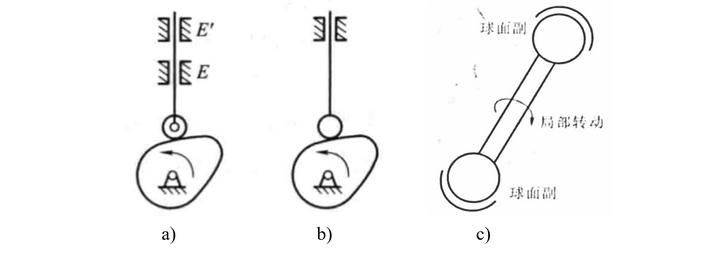
图5
平面机构中,典型的局部自由度出现在滚子构件中;在空间机构中,如由2个球面副串联而成的运动链S-S、由球面副和平面副串联而成的运动链SE、由平面副和平面副串联而成的运动链EE等,均存在1个局部自由度,计算时需要减去这个局部自由度。
3)虚约束
若机构的部分运动副之间满足某种特殊的几何约束条件,这些约束关系对机构的运动不产生作用,则我们称这部分约束为虚约束。计算这种情况时,应该在计算结果中加上虚约束数,或预先将产生虚约束的构件和运动副去掉,然后再进行自由度计算。
例4:存在虚约束的平面机构
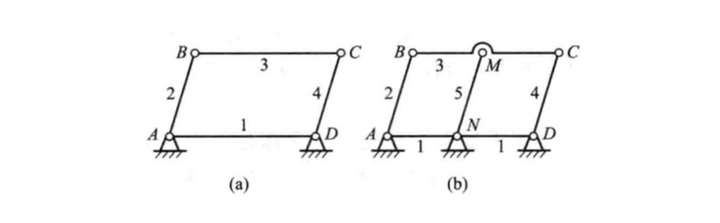
图6
比如图6中如果对于b而言没有考虑虚约束,就会是这种情况:
其中图6b机构中共有AB、BC、CD、AN、ND、MN与机架共7个构件;在A、N、D、M四处存在复合铰链;代入最初的公式计算为 ,这样显然不对。原因就是在a的基础上增加了构件5,引入了三个自由度,但同时增加了两个转动副,形式上引入了四个约束,也就是说多引入了一个约束。所以使用修正后的CGK公式即可算出自由度数应该为1。
那么到这里例2中空间机构的自由度就可以正确计算出来了,需要再减去6个局部自由度(每条支链存在一个S副产生的局部自由度),这样例2中的Stewart机构的自由度就是6个了~



















 6820
6820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












