




前言:在机器人学中,运动副是构成机器人机构的“关节”,是实现构件间相对运动的基础;而典型机构则是由若干运动副与构件组合而成、能完成特定运动功能的核心单元。理解二者的关系与特性,是掌握机器人运动原理的第一步。下面就对此问题进行简要论述,以便日后查阅学习。
一、机器人运动副:机构的“关节”基础
运动副的书面定义是:两个构件直接接触且能产生相对运动的连接部分。而简单来讲,就是两个活动件是怎么相对运动的(比如门框和门之间就是铰链转动的形式)。其分类方式主要有“相对运动自由度”和“接触形式”,下面聊聊具体都有什么。
1. 按相对运动自由度分类:单自由度与多自由度运动副
自由度(DOF)是描述机器人运动的重要指标,已知刚体在三维空间中有6个自由度(沿着x、y、z三轴的移动与转动),运动副的存在就是通过不同的形式限制刚体运动的多个自由度运动,以确保运动的稳定与一致性。
(1)单自由度运动副
这类运动副仅允许构件间沿1个方向的独立运动(移动或转动),是工业机器人关节的“主力军”。
-
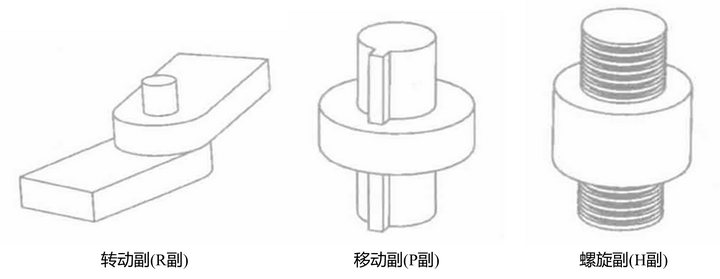
转动副(Revolute Joint,简称R副)
-
运动特性:两构件绕同一轴线作相对转动(如门轴、人类的肘关节)。
-
机器人应用:是最常见的关节类型,几乎所有串联机器人(如6轴工业机器人)的腰部、大臂、小臂关节均为转动副,决定了机器人的旋转运动能力。
-
-
移动副(Prismatic Joint,简称P副)
-
运动特性:两构件沿某一固定直线作相对移动(如抽屉滑轨、气缸活塞杆)。
-
机器人应用:多用于直角坐标机器人的X/Y/Z轴、伸缩式机械臂的手臂伸缩关节,实现线性进给运动。
-
-
螺旋副(Helical Joint,简称H副)
-
运动特性:两构件的相对运动是“转动+移动”的复合运动,且二者存在固定比例(如螺栓与螺母的配合:拧动螺栓时,螺栓既旋转又沿轴线移动)。
-
机器人应用:较少直接作为关节,多用于机器人的末端执行器(如拧螺丝机构)或调整机构。
-
(2)多自由度运动副
这类运动副允许2个及以上的独立相对运动,通常用于需要灵活姿态调整的部位。
-
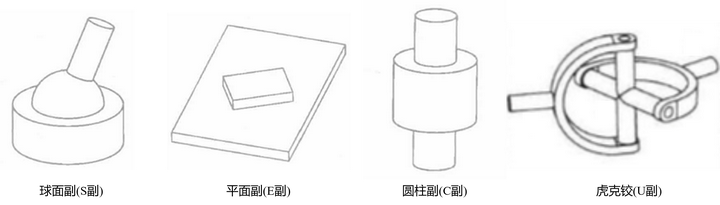
球面副(Spherical Joint,简称S副)3DOFs
-
运动特性:两构件绕某一固定点作3个独立的相对转动(如人类的肩关节、万向节的球头),但不允许平动。
-
机器人应用:多用于仿人机器人的肩部、髋关节,或需要大范围姿态调整的末端关节(如手术机器人的操作臂末端)。
-
-
平面副(Planar Joint,简称E副)3DOFs
-
运动特性:两构件在同一平面内作2个平动+1个转动的复合运动(如滑块在平面内的滑动+旋转)。
-
机器人应用:较少作为核心关节,多用于机器人的辅助定位机构(如工件的平面调整台)。
-
-
圆柱副(Cylindrical Joint,简称C副)2DOFs
-
运动特性:使两个连杆间发生同轴转动和移动的连接形式,通常可以看作同轴的旋转副和移动副组合而成。
-
机器人应用:比如雷达天线布置的关节连接处就有圆柱副的影子。
-
上述讲到的几种运动副均为低副,而实际机器人的关节只选择低副以确保接触处受力均匀、压强低、磨损小。那么有低副就一定会有高副,两者都是什么,又有何区别呢?
2. 按接触形式分类:低副与高副
这是机器人学中最常用的分类方式,核心区别在于构件接触面积的大小及受力特性——低副接触面积大、受力均匀、磨损小,是工业机器人的主流选择;高副接触面积小、易磨损,但能实现复杂运动。
|
类型 |
定义 |
核心特点 |
机器人中常见形式 |
|---|---|---|---|
|
低副 |
两构件通过面接触形成的运动副 |
接触面积大、承载能力强、磨损小、精度保持性好 |
转动副、移动副、螺旋副、平面副、圆柱副 |
|
高副 |
两构件通过点或线接触形成的运动副 |
接触面积小、承载能力弱、易磨损、可实现复杂相对运动 |
凸轮副、齿轮副、球面副.. |
以下是部分运动副的简图符号与副级:
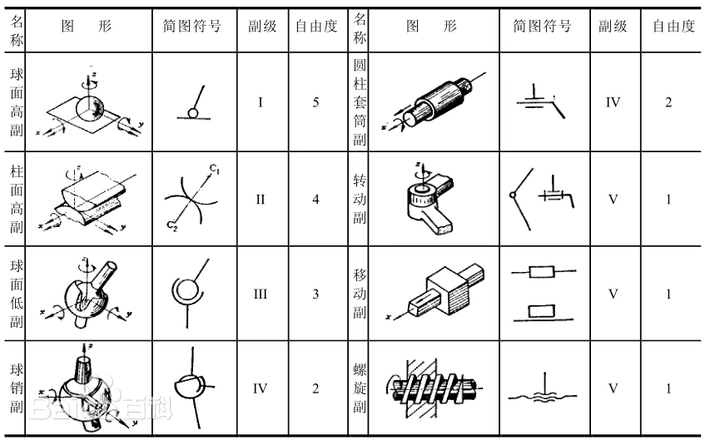
图源百度百科
二、机器人典型机构:运动副的“组合应用”
典型机构是机器人完成特定功能的“功能模块”,其核心是通过运动副的有序组合,将驱动源的运动(如电机的旋转)转化为末端执行器所需的运动(如抓取、搬运、焊接等)。以下是机器人中最常见的4类典型机构及其运动副构成。
1. 串联机器人机构:“串联关节链”结构
串联机构是最主流的机器人结构,其特点是构件与运动副依次串联,形成“基座→大臂→小臂→末端执行器”的链式结构,自由度通常为3~6个。
核心构成
-
构件:基座(固定构件)、大臂、小臂、末端执行器(动构件);
-
运动副:以转动副(R副) 为主,部分场景搭配移动副(P副) 。
典型案例:6轴工业机器人(如ABB IRB 1200)
其关节(运动副)分布如下:
-
轴1(腰部):转动副(R副),实现机器人绕基座的旋转;
-
轴2(大臂):转动副(R副),实现大臂的上下摆动;
-
轴3(小臂):转动副(R副),实现小臂的前后摆动;
-
轴4(腕部1):转动副(R副),实现末端执行器的旋转(绕小臂轴线);
-
轴5(腕部2):转动副(R副),实现末端执行器的俯仰;
-
轴6(腕部3):转动副(R副),实现末端执行器的扭转。

特点:运动空间大、灵活性高,适合焊接、搬运、装配等复杂任务。
2. 直角坐标机器人机构:“三向平移”结构
直角坐标机器人(Cartesian robot)是最基础的机构之一,其特点是3个运动副沿相互垂直的X、Y、Z轴分布,仅实现线性平动。
核心构成
-
构件:X轴滑轨、Y轴滑台、Z轴立柱、末端执行器;
-
运动副:全部为移动副(P副) ,分别对应X、Y、Z三个方向的平动。
典型案例:3D打印机

- X轴:移动副(P副),带动机构沿水平方向移动;
- Y轴:移动副(P副),带动热床沿垂直于X轴的水平方向移动;
- Z轴:移动副(P副),带动末端执行器(打印头)上下移动。
特点:运动精度高、控制简单,适合上下料、分拣等规则轨迹任务。
3. “多支链并联”结构
并联机构的特点是末端执行器通过2条及以上的“支链”与基座连接,每条支链由运动副和构件组成,所有支链共同驱动末端运动,是一种典型的闭链机构。但是同时,并联机构的构型以及其自由度分析比串联机构要复杂的多。
核心构成
-
构件:基座、末端平台(动平台)、2~6条支链(每条支链含1~3个构件);
-
运动副:主要以转动副(R副)、球铰(球面副S副)、虎克铰(U副) 及移动副(P副)组成 。
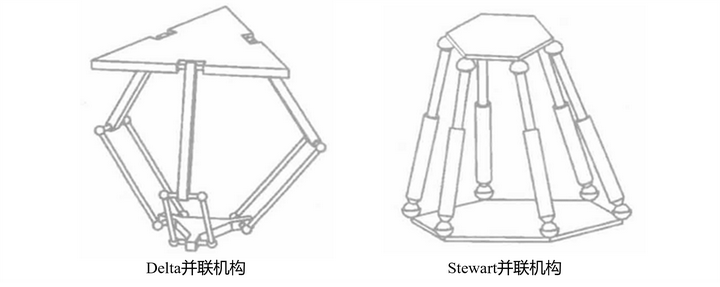
典型案例①:Delta机构
其结构包含3条对称支链,每条支链的运动副构成:
-
与基座连接端:转动副(R副),由电机驱动旋转;
-
中间连杆:移动副(P副),实现支链的折叠与伸展,通常可以由滑台和电推缸驱动;
-
与末端平台连接端:球铰(球面副S副),允许支链与末端平台的多角度相对运动。
特点:质量轻运动惯量小、刚度高、运动速度快、定位精度高,适合食品分拣、电子元件装配等轻工业产线。
典型机构②:Stewart平台
Stewart机构由上部动平台、下部的静平台与连接两平台的支链组成:
-
每个支链均由一个移动副构成,通常工业中由液压缸或电推缸驱动;
-
平台与支链连接处由球副(S副)连接,因此动平台位置由直线推杠的形成所共同决定。
除了上述的两种典型的并联机构外,近年来许多学者也在并联机构设计上做了大量工作,由于并联机构的高刚度等特点使得其在许多场合得到应用(射电望远镜反射面调整系统、海上直升机停机台稳定系统、“天眼馈源舱”调资机构......),也可以看到未来并联机构以及串并混联机构的设计也将继续发挥更大的作用。
4. 末端执行器机构:“执行功能”核心
末端执行器是机器人与工件直接接触的部分,其机构由运动副组合而成,实现“抓取、夹紧、旋转”等具体功能,最典型的是气动/电动抓手机构。
核心构成
-
构件:固定爪体、活动爪体、传动杆;
-
运动副:以移动副(P副) 为主,搭配转动副(R副) 实现开合。
典型案例:两指平行抓手
其运动副构成:
-
活动爪体与固定爪体:移动副(P副),活动爪体沿固定导轨平移,实现“张开-闭合”;
-
传动杆与活动爪体:转动副(R副),将气缸/电机的动力转化为爪体的平移运动。
特点:结构简单、响应快,根据工件形状可扩展为三指、多指抓手或专用夹具。

总结:运动副与典型机构的核心关联
运动副是“基础单元”,决定了构件的相对运动形式;典型机构是“功能组合”,通过运动副的有序搭配实现特定运动功能。掌握这一逻辑,不仅能帮助更好理解现有机器人的结构原理,更能为后续机构运动学分析、机器人设计等打下坚实基础。
声明:本文用以学习熊有伦院士的《机器人学 建模、控制与视觉》出发,搜集扩展了一部分知识,以备自己后续查阅。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












