



SparseGS主要解决了3D GS(Gaussian Splatting)与NeRF类似的稀疏视角问题,即当训练输入视角很稀疏时,GS会在训练中过拟合,从而在新视角上的测试结果较差。本论文则是提出使用原有的深度先验以及显式的约束来提升GS在稀疏视角下的表现,并且能有效缓解背景崩塌和移除背景中的漂浮物。
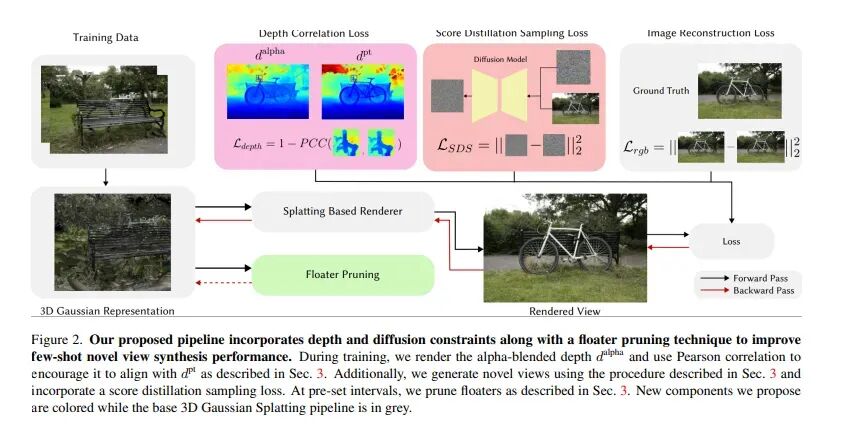
SparseGS:使用Gaussian Splatting 进行实时360°稀疏视图合成
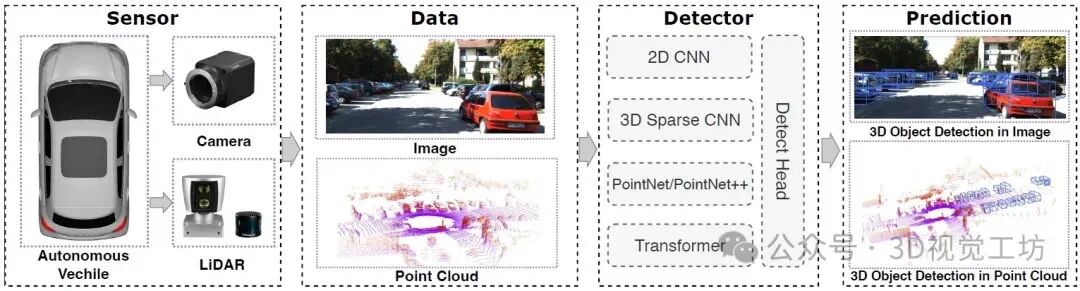
一篇自动驾驶3D目标检测的最新综述,总结了基于相机、激光雷达和多模态3D目标检测算法,还研究其对环境变化、噪声和天气变化的应变能力
Depth Anything论文是 TikTok 使用了有标注和无标注图像来实现更好的单目深度估计(MDE)。
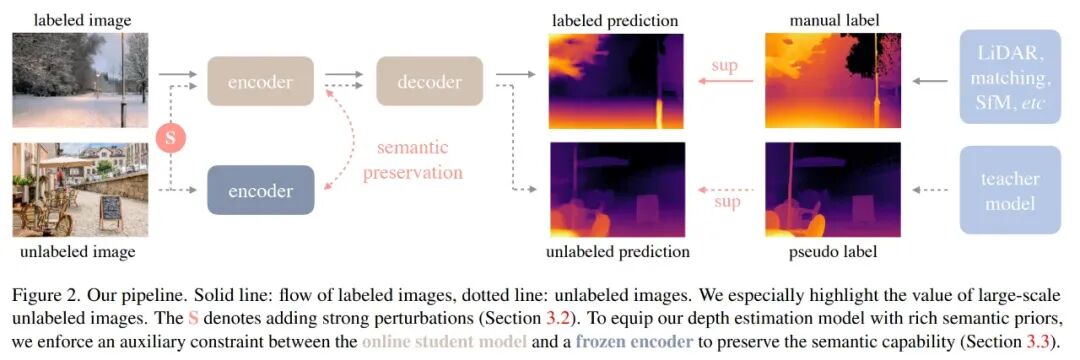
纪念碑谷式错觉图像都被「看穿」,港大、TikTok的Depth Anything火了
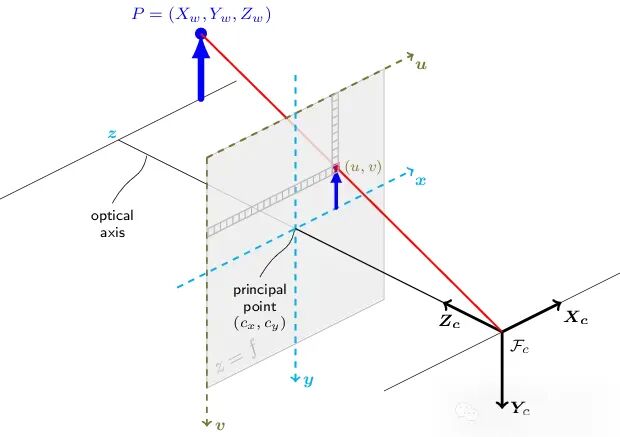
张正友标定法一种求解相机内外参的标定方法,C++代码与理论讲解
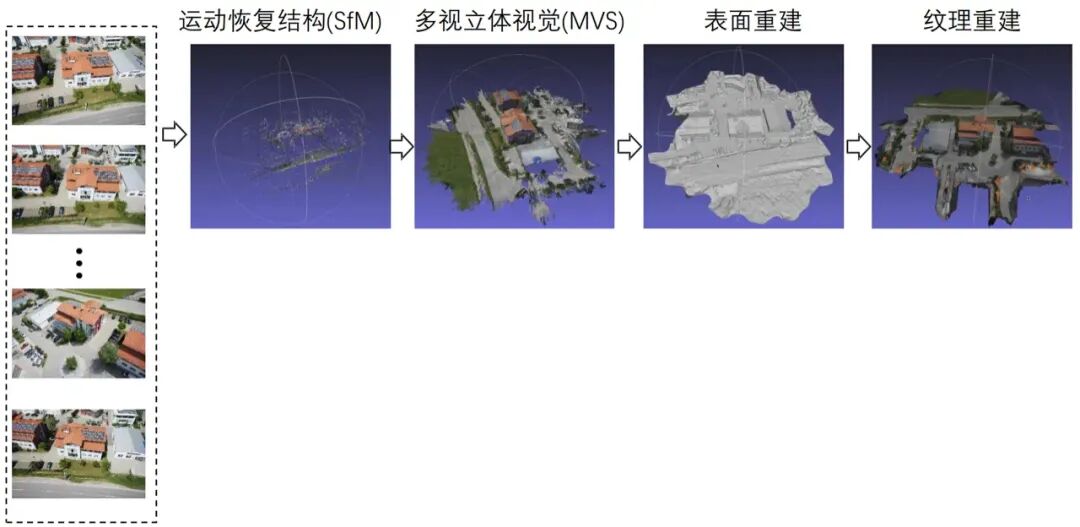
NeRF与传统三维重建技术相比的优缺点分析


















 375
375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










