



坐标系
坐标系对控制来说是至关重要的,不像算法,算法错了就错了,但是控制出问题了就可能面临炸机。
先上图:
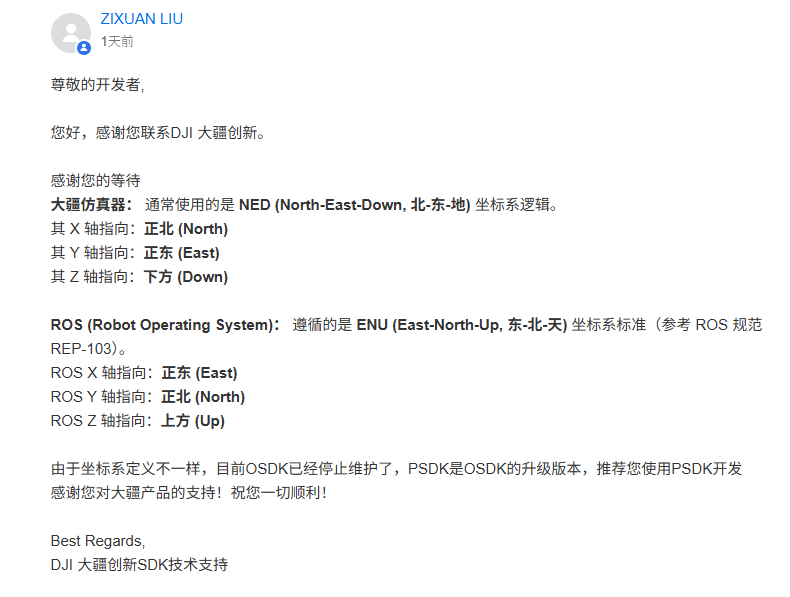
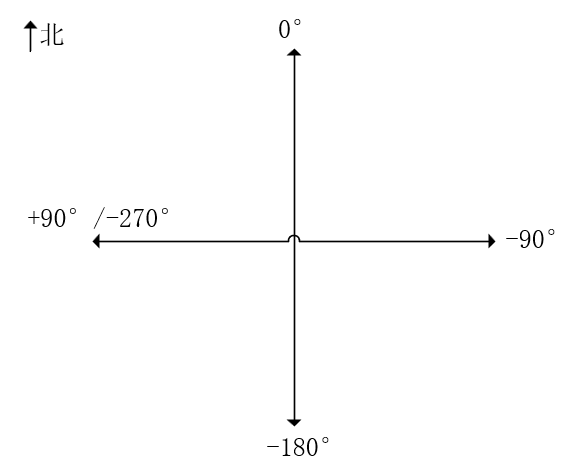
如果用速度控制的话,控制层面的水平面坐标系应该以下图为准:
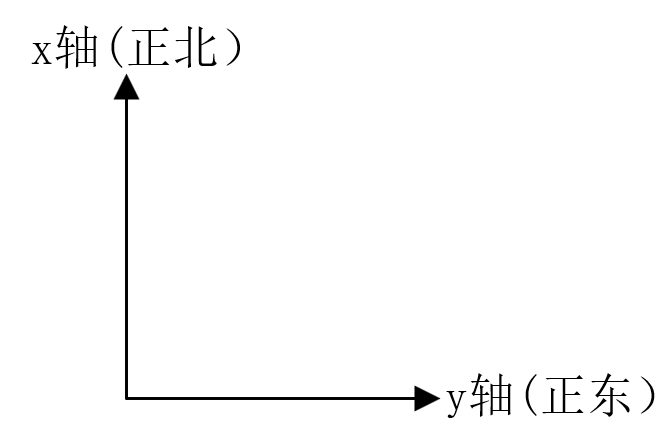
做控制肯定会用到 /dji_osdk_ros/attitude 和 /dji_osdk_ros/velocity 。这两个分别是大疆无人机的姿态四元组数据(x , y , z , w)和飞机的移动速度。这两项都遵循ROS规范,也就是说x轴为正东方向,y轴指向正北。即下图:
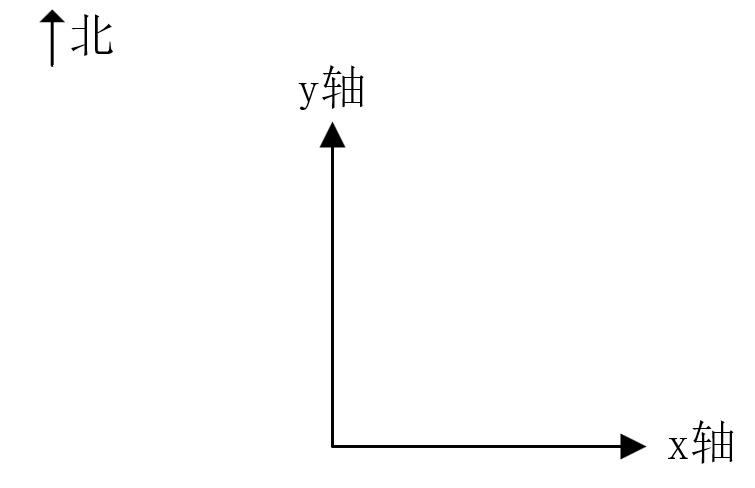
将飞机的姿态四元组数据转成 欧拉角(roll , pitch ,yaw)后,横滚角和俯仰角可以不做变换,偏航角yaw在正东时为0度,即下图所示情况:
如果以北为0°,需要手动减去90°,同时会改变值域。
在实际使用中一般会结合算法使用,需要注意算法输出的控制信息是否具有方向性。
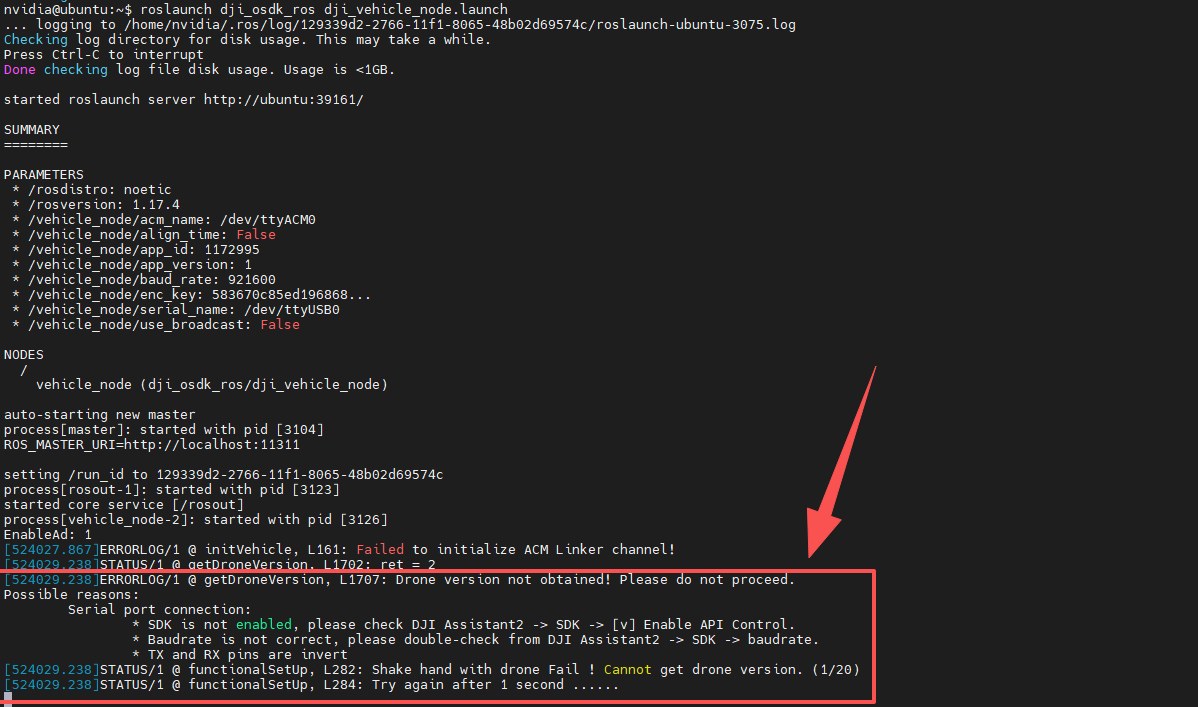
节点报错
如果已经开启OSDK通信串口,并且串口连接正确,仍然出现以下报错,就需要将大疆节点终端通过Ctrl+C中断,虽然无法立即停止,但是大约循环到第六次就退出了,别用Ctrl+Z。停止后重启节点就行。
补充
姿态四元组数据转欧拉角
struct EulerAnglesDeg {
double roll; // 横滚角 (deg) φ
double pitch; // 俯仰角 (deg) θ
double yaw; // 偏航角 (deg) ψ
};
/**
* @brief 四元数转欧拉角(ZYX顺序 → 偏航-俯仰-横滚)
* 航空/飞控/机器人领域标准顺序
* @param q 输入四元数(q0=w)
* @param euler 输出欧拉角(度)
* @return 0=成功 -1=四元数模长为0
*/
static inline void Quat_To_EulerZYX_Deg(const DJI::OSDK::Telemetry::Quaternion& q, EulerAnglesDeg& euler)
{
float w = q.q0;
float x = q.q1;
float y = q.q2;
float z = q.q3;
// 快速归一化
float norm = sqrtf(w*w + x*x + y*y + z*z);
if (norm > 1e-8f) {
float inv = 1.0f / norm;
w *= inv; x *= inv; y *= inv; z *= inv;
} else {
euler.roll = euler.pitch = euler.yaw = 0.0f;
return;
}
const float DEG_PER_RAD = 57.29577951308232f;
// Roll
float sinr_cosp = 2.0f * (w*x + y*z);
float cosr_cosp = 1.0f - 2.0f*(x*x + y*y);
euler.roll = atan2f(sinr_cosp, cosr_cosp) * DEG_PER_RAD;
// Pitch
float sinp = 2.0f * (w*y - x*z);
if (fabsf(sinp) >= 1.0f)
euler.pitch = copysignf(90.0f, sinp);
else
euler.pitch = asinf(sinp) * DEG_PER_RAD;
// Yaw
float siny_cosp = 2.0f * (w*z + x*y);
float cosy_cosp = 1.0f - 2.0f*(y*y + z*z);
euler.yaw = atan2f(siny_cosp, cosy_cosp) * DEG_PER_RAD;
}



















 394
394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










