



网友发来一段视频,问我这逆天的纸飞机怎么可以一直飞行,是什么原理呢?
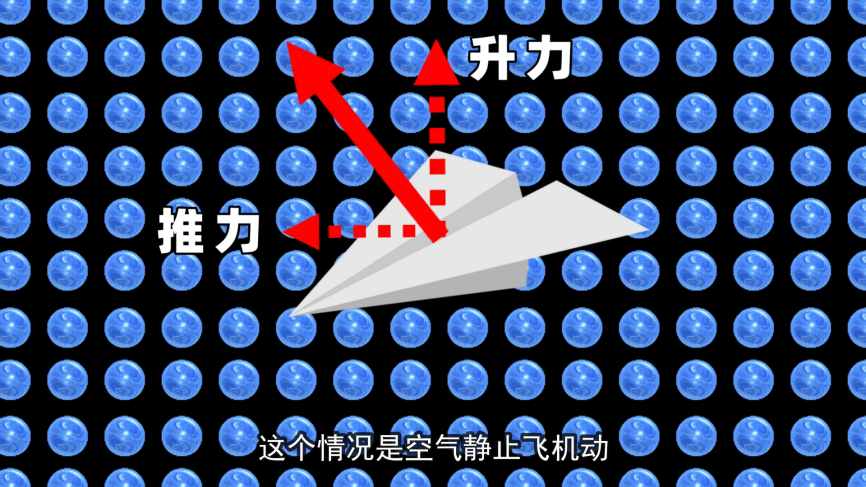
纸飞机之所以叫飞机,自然和一坨纸不一样,它会向前运动,并且落地速度要慢很多,折纸飞的时候,头部一般会多折几次,增加重量。在下落过程中便有低头的趋势,机翼撞击下面的空气分子后,受到了垂直向上的力,其竖直分力减缓了下落,水平分力推动了前行。这个情况是空气静止,飞机动。
那么转换个思路,如果能让空气动起来,向上主动撞击机翼,给它升力,纸飞机是不是就可能永不落下了呢。那该如何让空气分子向上运动呢?秘诀就是这块板!

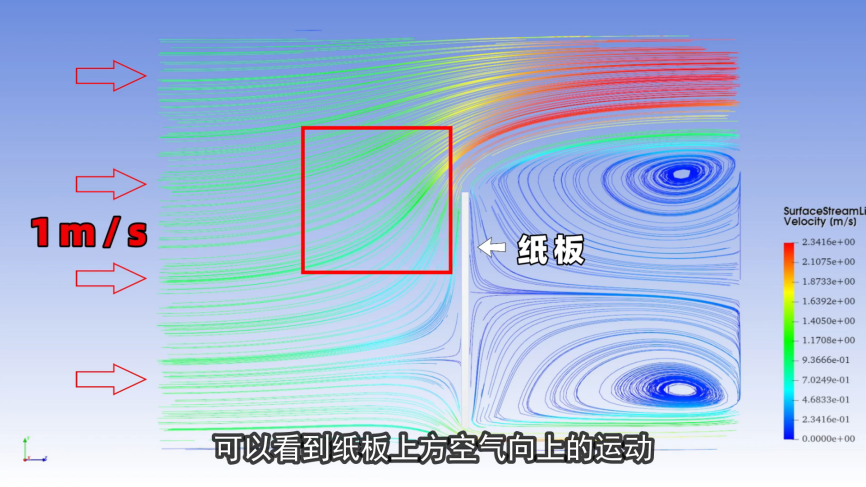
我拿着板向前走,板上方区域的空气就向上运动了。空气分子运动你看不见,我们让它显形。这是在流体仿真软件AICFD中,用1m/s的风吹板子,模拟我拿板行走的过程 ,可以看到纸板上方空气向上的流动。
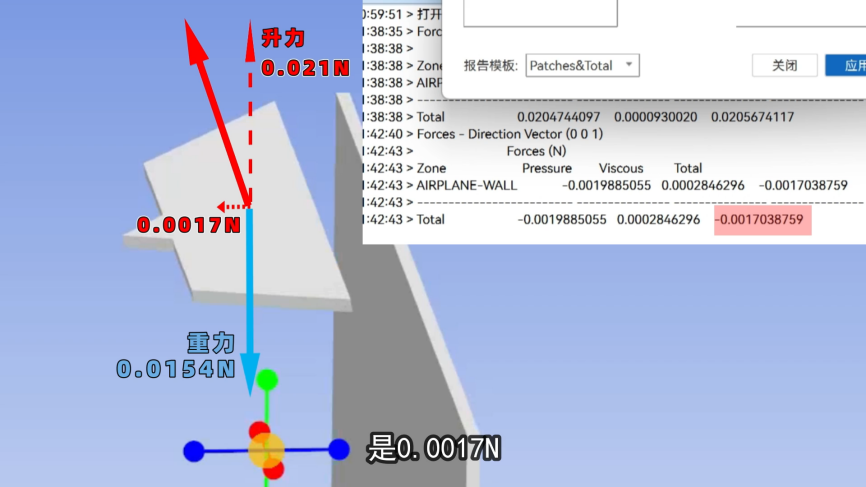
那么再加个纸飞机呢,它在流场中受到重力、阻力以及由垂直向上的力分解出的升力和推力,计算后软件统计出升力是0.021N。
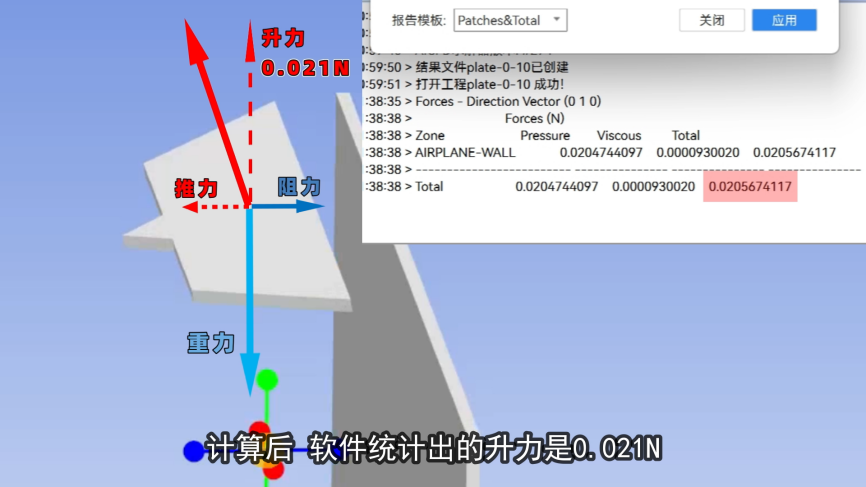
而最常用的每平米70g的A4纸,按纸飞机的尺寸折算后重力仅有0.0154N。再统计一下水平方向的合外力,也就是推力减阻力是0.0017N。
这也就是说只要你控制好板子与飞机的相对位置,就能为其提供不小于重力的升力,和不小于阻力的推力,飞机便会持续前行,永不下落。另外,这纸板的选择还有点技巧,就是尽量选大点儿的。

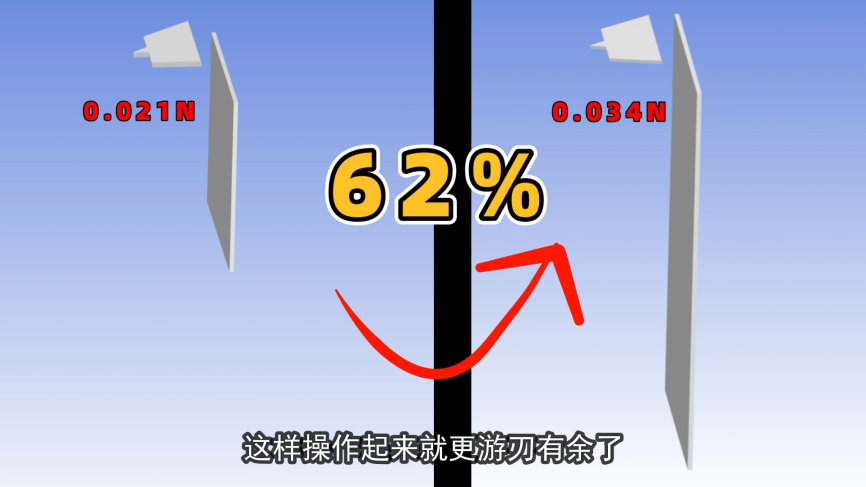
仿真中,我把纸板高度增加一倍,能提供的升力就也增加了62%,这样操作起来就会更游刃有余了。
除了板子的作用外,想要一直飞,飞机本身还有些讲究,这种松开手一头扎地的是几乎没可能的。
得是这样足够轻,机翼足够大,可以自由在空气中滑翔一段距离的才可以,有专门玩儿飞机的朋友加它冲浪纸飞机。
理论已解析,飞机已就位,就差咱简单实践一下了,给大家看看。好学好学,只要叠几十个纸飞机,从中选个好的,再练习一万多次就成啦!



















 524
524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










