




本系列笔记为方便日后自己查阅而写,更多的是个人见解,也算一种学习的复习与总结,望善始善终吧~
基本子空间与投影矩阵
上一节课我们已经了解了投影矩阵 projection matrix, P=A(ATA)−1AT
结合我们过去学习到的四个基本子空间的内容,对于 Pb 即b的投影:
- 若b在A的column space 则其投影为其本身b
- 若b垂直于A的column space则其投影为一个点,没有长度,为0
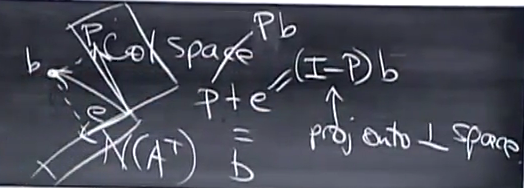
这是一张很重要的图片,向量 b 的投影在
 本文介绍了线性代数中最小二乘法的概念,阐述了如何寻找误差最小的最优解,并探讨了投影矩阵的性质。通过证明ATA可逆,讨论了矩阵Ax=b解的存在条件。同时,解释了基本子空间和投影矩阵的关系,指出当向量b在A的列空间时,其投影为其本身;若垂直于列空间,则投影为0。最后,提到了标准正交向量组在线性无关性中的作用。
本文介绍了线性代数中最小二乘法的概念,阐述了如何寻找误差最小的最优解,并探讨了投影矩阵的性质。通过证明ATA可逆,讨论了矩阵Ax=b解的存在条件。同时,解释了基本子空间和投影矩阵的关系,指出当向量b在A的列空间时,其投影为其本身;若垂直于列空间,则投影为0。最后,提到了标准正交向量组在线性无关性中的作用。
本系列笔记为方便日后自己查阅而写,更多的是个人见解,也算一种学习的复习与总结,望善始善终吧~
上一节课我们已经了解了投影矩阵 projection matrix, P=A(ATA)−1AT
结合我们过去学习到的四个基本子空间的内容,对于 Pb 即b的投影:
- 若b在A的column space 则其投影为其本身b
- 若b垂直于A的column space则其投影为一个点,没有长度,为0
这是一张很重要的图片,向量 b 的投影在

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






























