



一、物理AI时代需要什么样的"操作系统"
过去一年,物理AI领域持续走热:具身智能、世界模型、通用机器人、具身大模型……每一个新概念都伴随着巨额融资和宏大叙事。然而,当视角下沉到工厂、施工现场、设计院这些一线场景,得到的回答却常常是:“还在试点。”
为什么?问题不在算法,不在算力,而在于一个更基础的问题——没有可用的"原材料" 。一家装备制造企业想用AI升级焊接机器人,第一步就需要找数据、找仿真环境、找可训练物体模型,而这些东西要么需数月自建,要么需高价进口,每家企业都在重复造轮子。
物理AI时代需要的,是一套"一站式"的工业化生产体系——打通仿真资产的生产、管理、流通、调用四个环节,让企业像调用API一样获取可信的仿真能力。我们可以把这种"基础设施级"的能力,类比为物理AI时代的"操作系统"。
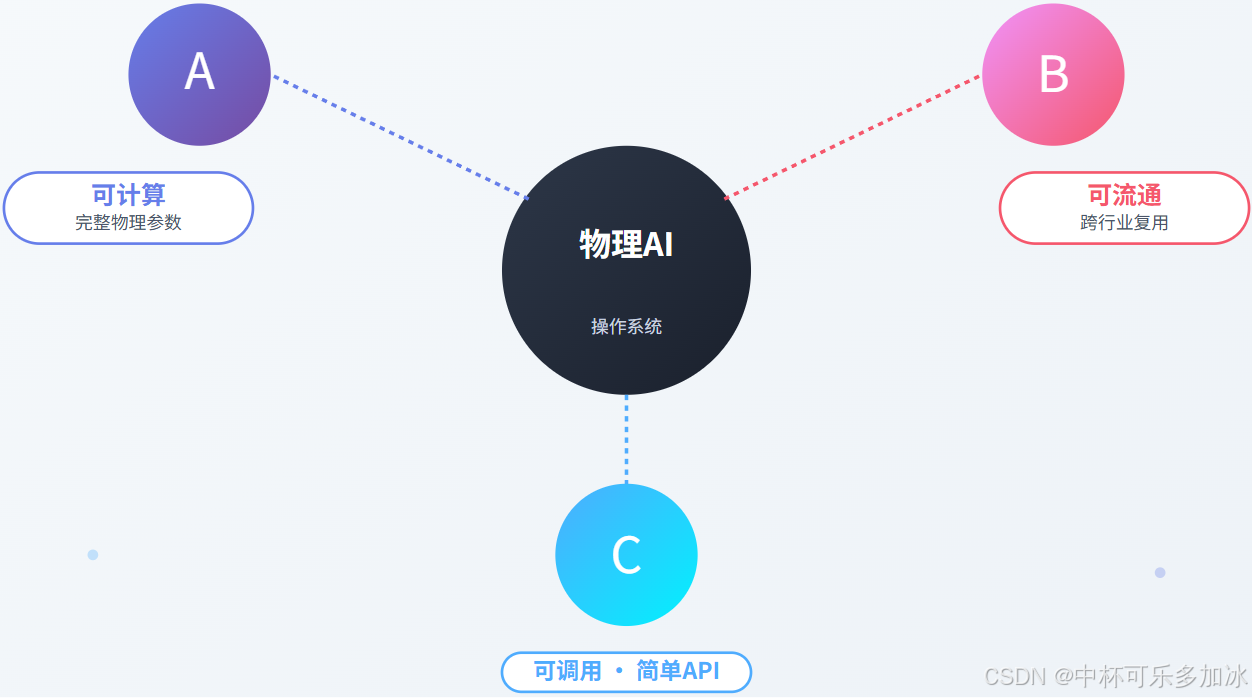
那么,物理AI时代的"操作系统",应该具备哪几种核心能力?回到产业实践,至少要回答三个问题:
第一,让仿真资产"可计算"。 仿真资产不仅仅是一个3D模型——它必须包含密度、惯性、摩擦系数、热膨胀系数等完整的物理参数,让AI真正"理解"物体行为,而非仅"看到"形状。通过统一的物理参数描述与认证,让每一个进入生产体系的资产都自带"物理语言",可以直接被仿真引擎和AI模型消费。
第二,让仿真资产"可流通"。 绝大多数仿真资产至今仍沉睡在各个企业的本地硬盘里:一家车企做出一套机械臂模型,隔壁食品厂想用,又得从零建模。一个完美的物理AI操作系统,应该让资产"一次生产、处处可用",把过去每个项目重复造轮子的成本,变成整个产业共享的"复用红利"。
第三,让仿真资产"可调用"。 现实中,一个机器人算法团队想用仿真,往往得先学一套专业仿真软件、配环境、跑参数,繁琐到把大半开发者挡在门外。一个完美的物理AI操作系统,应该把这一切封装在 AI Agent 接入层背后——让"会写几行代码"的人也能调用仿真,门槛从"专业仿真工程师"降到普通开发者。
三件事合起来,构成了"物理AI时代操作系统"的本质:调度仿真资产这一核心生产要素,让分散的技术成果汇聚成可流通、可用、可复制的工业化体系。
那为什么物理AI喊了这么久,真正落地的案例却屈指可数?为什么"操作系统"的构想提了十年,始终没能出现? 要回答这个问题,得从物理AI落地的真实困境说起。
二、物理AI为什么"叫好不叫座"
从工厂、施工现场、设计院的实际观察来看,具身智能、世界模型、通用机器人技术的落地效果,与产业预期往往存在显著落差:机器狗爬楼梯仍会摔跤,机器人拿取瓶装水时甚至可能碰倒整个货架。根源在于数字孪生与机器人训练"一机一调"的困局——传统机器人训练本质上是"死记硬背":教它抓这个杯子,它会抓这个杯子;换一个新杯子,对不起,重新教。要让机器人"理解"物理世界,需要的不仅是更好的算法,更需要可信的仿真环境和标准化的仿真资产。
把视角拉远,这种困局有其深刻的历史与产业根源。过去三十年,仿真软件一直走的是"专业工具"路线:服务于科研院所和大型企业的特定项目,价格昂贵、部署复杂、人才稀缺。仿真资产也长期处于"项目制"开发状态——一个团队做一个项目,做完之后资产沉淀在本地硬盘里,下一个项目又从零开始。整个行业没有形成"生产—流通—复用"的工业化循环。
而与此同时,物理AI的需求却在爆发性增长。具身大模型训练需要海量、可信、多样化的仿真数据;通用机器人需要快速适配不同的任务场景;世界模型需要构建可交互、可推理的虚拟环境。这种错位的本质,是数字孪生正在经历第三次跃迁:从"专用工具"走向"通用基础设施",从"定制开发"走向"即插即用",从"项目交付"走向"平台化生产"。
明确了"仿真资产"作为核心推动力的地位,进一步的产业问题是:物理AI究竟需要满足哪些条件,才能真正发挥仿真资产的价值?什么样的资产才是"可信"的、能直接用于AI训练的?
这正是"可信度三角"框架要回答的问题。
三、物理AI的"可信度三角"
要让仿真资产真正服务于物理AI,它必须满足三个硬性条件,缺一不可。 我们可以将其归纳为物理AI的"可信度三角":
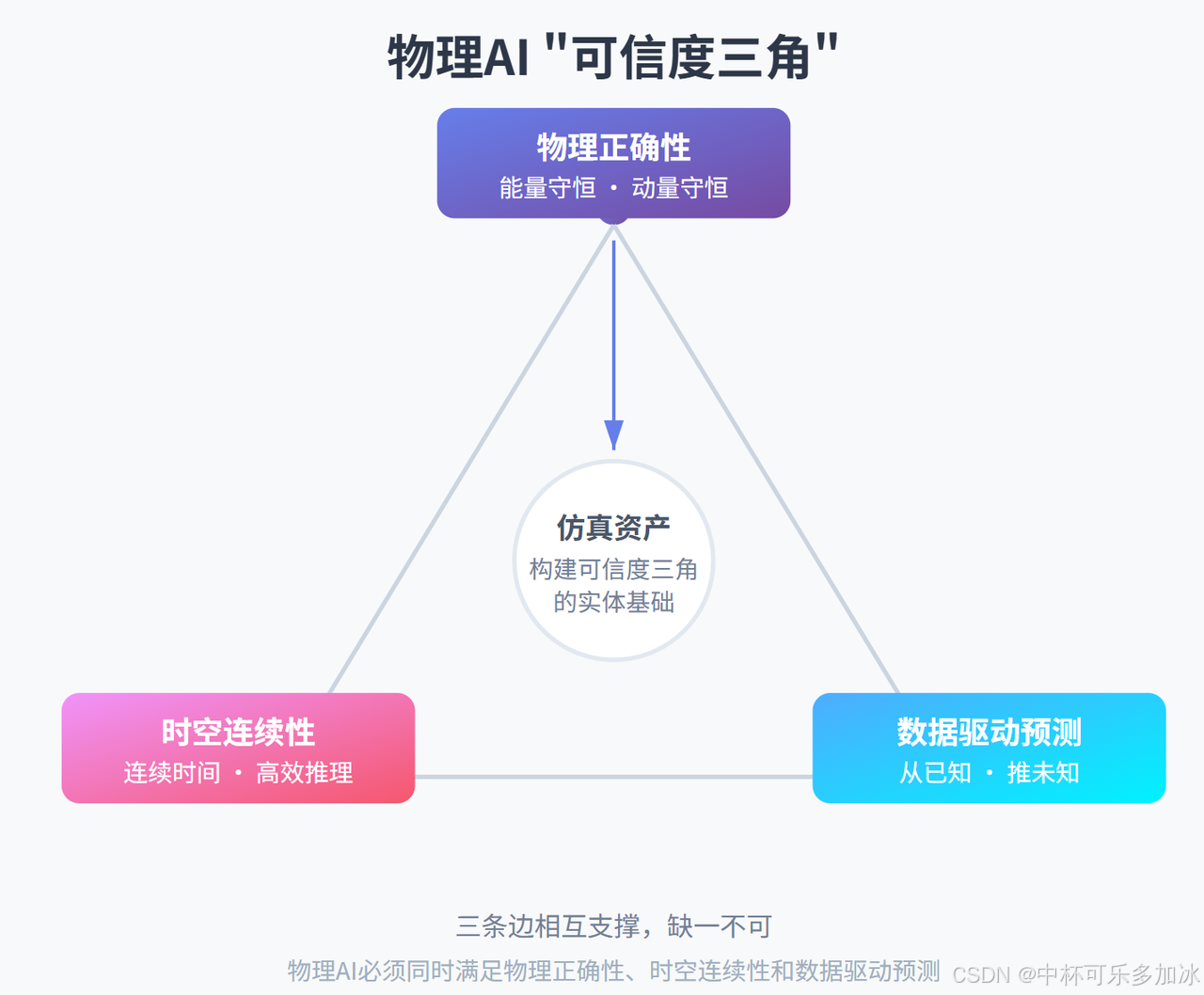
第一条边是物理正确性。
物理AI的预测,必须符合基本的物理定律。能量要守恒,动量要守恒,物体不能穿墙而过,摩擦力不会凭空消失。这是根基,没有这个,其他一切都是空中楼阁。
但"物理正确性"不是说要把物理方程背得滚瓜烂熟,而是说AI模型必须在物理约束的框架内进行推理。这正是Sim Ready标准解决的核心问题——它确保仿真资产包含的物理信息是完整的、正确的、可验证的。一个Sim Ready认证的资产,不仅包含几何信息,还包含密度、弹性模量、摩擦系数、惯性矩阵、热膨胀系数等完整的物理参数,以及语义标注和使用场景描述。
换句话说,Sim Ready标准让物理AI"算得对",而不只是"看起来像"。
第二条边是时空连续性。
物理世界在时间与空间中连续运转。机械臂抓取涉及位置、速度、加速度的连续变化,涉及接触力从零到峰值再到零的消长。传统数值仿真面临时间步长"太小计算爆炸,太大稳定性出问题"的两难。AI的优势在于从海量数据中学习物理规律,在连续时间轴上高效推理——毫秒级完成传统仿真需要数小时才能完成的计算。
第三条边是数据驱动预测。
前两条保证可靠性和连贯性,而这条边赋予物理AI真正的"智能"——从已知推导未知,从过去预测未来。物理方程告诉你"在这个条件下会发生什么";AI告诉你"当条件变化时,大概率会发生什么"。物理AI可以基于有限训练数据,预测新物体在各种姿态下的行为模式,即使这个物体的参数从未出现在训练集中。
三条边相互支撑,缺一不可:没有物理正确性,AI就是胡猜;没有时空连续性,推理就会断层;没有数据驱动预测,物理AI就退化为传统仿真。
这三条边构成了仿真资产的"准入门槛"——只有同时满足物理正确性、时空连续性和数据驱动预测能力的资产,才是可信的、能在真实工程中落地的资产,而不是停留在Demo阶段的概念。
那么,谁来建立这套标准?谁来确保进入生产体系的每一份资产都经得起这三条边的检验?这正是衍像平台要解决的核心问题。
四、仿真资产:物理AI时代的核心生产要素
既然衍像平台要调度"仿真资产" ,那仿真资产到底是什么?为什么它这么关键?

过去几年,大语言模型在语言理解、代码生成、逻辑推理方面展现出了惊人的能力。但它们有一个共同的弱点:对物理世界缺乏基本的"接地"(Grounding)。
问一个大语言模型"如何让机器人抓起一个杯子",它可能会给出一段听起来专业但实际上完全无法执行的描述。它知道"杯子"这个词,却不知道杯子的重量、重心、材料特性;知道"抓取"这个动作,却不知道需要多大的力、什么样的角度、多快的速度。
这不是模型的错——语言模型在互联网文本上训练,而互联网文本几乎不包含物理参数的细节知识。
仿真资产要解决的,正是这个"Grounding"问题。
它是一种标准化的、可计算的物理物体数据格式。一个Sim Ready认证的仿真资产,不仅包含几何信息,还包含密度、弹性模量、摩擦系数、惯性矩阵、热膨胀系数等完整的物理参数,以及语义标注、使用场景描述和标准接口。
这种标准化为什么重要?
因为它让仿真资产像USB设备一样"即插即用"。一个经过认证的资产,可以"一次创建、多处运行"——在这个仿真引擎里训练出来的机器人策略,换到另一个仿真引擎里同样有效。这打破了传统仿真"一机一调"的困局,让跨平台复用成为可能。

更重要的是,仿真资产解决了具身智能面临的"数据困境"。真实环境中,机器人数据难以大规模采集——机械臂运行意味着磨损,传感器部署成本高昂。而当仿真资产足够丰富、仿真精度足够可信时,我们可以在虚拟环境中大规模生成训练数据。
这正是仿真资产的核心价值:它让AI从"空中楼阁"落地到"脚踏实地",成为虚拟智能与物理现实之间的桥梁。
仿真资产让AI从"空中楼阁"落地到"脚踏实地",成为虚拟智能与物理现实之间的桥梁。而要让这一"新型基础设施"真正发挥作用,还需要一套完整的工业化生产与流通体系——这也正是北京孪界科技多年前下决心躬身入局的起点,一群在仿真引擎、数字孪生与工业现场摸爬滚打多年的工程师,在看够了"换个杯子就要重训一遍"之后,以"构建真实正确的数字孪生世界"为长期愿景, 从最底层的物理引擎开始,逐层搭建起一个覆盖仿真资产生产、管理、流通、调用的工业化平台——这就是衍像平台。
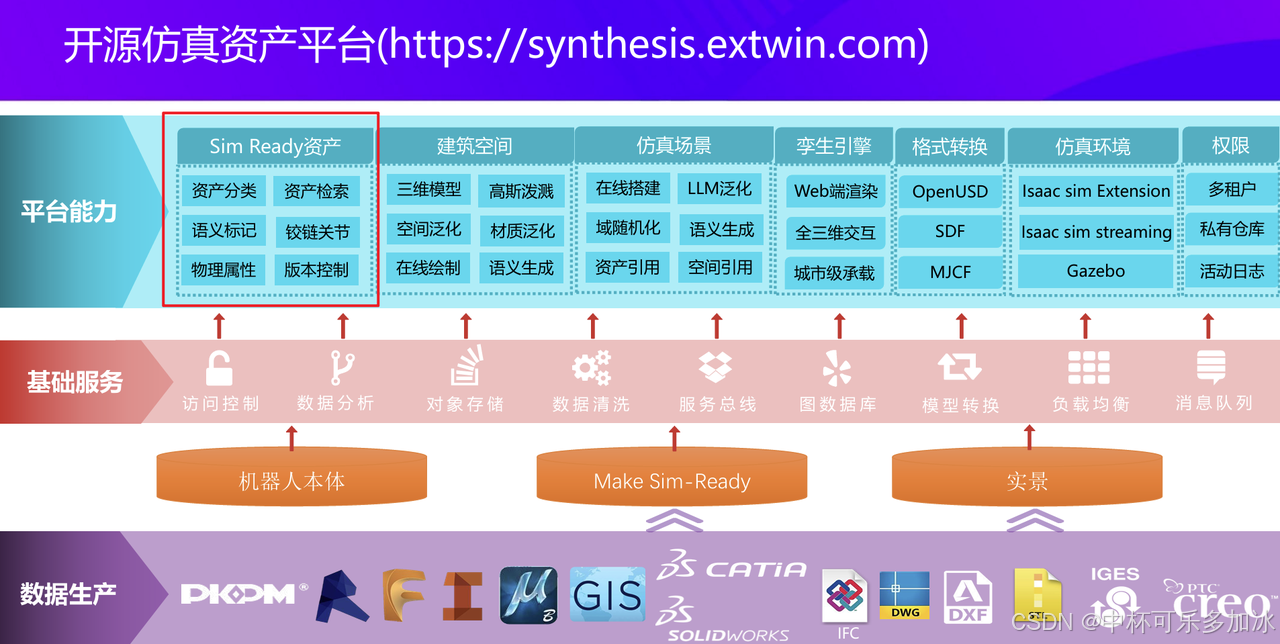
五、衍像平台架构:仿真资产的工业化生产体系
回到产业实践,衍像平台的定位可以概括为一句话:物理AI时代的操作系统。
为什么需要这样一个平台?——如果没有操作系统,你需要直接和硬件对话才能让电脑完成一件事——这显然效率太低。同样的道理,如果没有衍像平台,开发者就需要直接和每一个仿真引擎、每一套资产管理系统、每一个智能体框架打交道,门槛高得吓人。衍像平台把这一切封装起来,让调用仿真资产变得像调用API一样简单。
那么,衍像平台具体是怎么构建的呢?就架构而言,衍像平台分为三个层次,每一层都对应一个关键的产业能力。

5.1 工业级可信仿真底座
工业级可信仿真底座是整个体系的技术底座,也是衍像平台的"第一引擎"所在。
传统的仿真软件有两个致命问题:要么太慢,工业级仿真任务需要几周才能完成;要么太专,某个仿真引擎训练出来的策略,换到另一个环境就失效了。
衍像平台要同时解决这两个问题。它足够快——工业级仿真任务在几小时内完成,而不是几周。它足够全面——支持刚体动力学、柔体动力学、多体系统、流体-结构耦合、热-力耦合。它还与AI深度集成——能够高效导出仿真数据,能够与主流机器学习框架无缝对接。
从架构设计看, 衍像平台的工业级可信仿真底座从一开始就是为Sim Ready标准设计的。所有在这里创建的仿真资产,默认就满足认证要求,可以直接进入资产管理层流通。这意味着开发者在平台上构建的每一份资产,生来就具备了"即插即用"的特性。
在水利枢纽的防洪调度中,他可以快速构建水流仿真模型;在电力系统的故障演练中,它能够模拟电网的暂态稳定性;在工厂的产线优化中,它支持对整个生产流程进行高保真度的虚拟验证。
5.2 资产管理层:标准化流通与复用
这是连接仿真引擎与智能体应用的枢纽,也是衍像平台实现"一模多擎"的关键支撑。
每一个仿真资产在这里都有唯一的身份标识和完整的元数据描述。当开发者需要某个特定任务的仿真资产时,平台可以基于元数据进行智能检索——你可以搜索"耐高温的金属零件",也可以搜索"适合双臂机器人协作的轻量级物体"。
资产管理层还承担着"质量认证"的职能。所有进入平台的资产,都需要经过Sim Ready标准的认证审核。不是随便一个3D模型就能叫仿真资产——它必须满足可计算性、可复用性、可交易性的要求。

这种认证机制的意义在于,它建立了一个可信的"仿真资产市场"。开发者不用担心某个资产的参数是编造的、不用担心它在自己的仿真环境中无法运行、不用担心不同来源的资产之间存在兼容性问题。
更重要的是,资产管理层实现了仿真资产的跨行业复用。一个在水电站仿真中验证过的"水轮机资产",经过适当的参数适配,可以用于电网调度系统的仿真训练;一个在汽车工厂中积累的"机械臂资产",经过语义对齐,可以部署到食品加工生产线上。这种跨行业、跨场景的资产流通复用,正是衍像平台作为"核心调度平台"的价值体现。
5.3 AI Agent接入层:从物理API到智能接口
这是面向开发者的"出口",也是衍像平台连接"第二引擎"——物理AI的通道。
传统仿真需要工程师手动定义场景、设置参数、运行求解,这门槛太高了。一个机器学习工程师如果需要仿真数据,他得先学会使用专业的仿真软件,学会配置各种参数,学会解读仿真结果——这不是在解决问题,这是在制造新的问题。
智能体接入层将复杂的仿真配置抽象为简洁的API调用。你只需要告诉平台"我需要训练一个抓取机器人的策略",平台会自动配置合适的仿真场景、调用相关的仿真资产、运行必要的仿真计算、返回格式化的训练数据。
更重要的是,这种封装支持了一种新的智能体设计模式——“物理优先”。
传统强化学习往往从随机探索开始,智能体在物理世界中"试错"学习,效率低下,还有安全风险。你不能让一个刚学会走路的机器人去抓取易碎品——它大概率会把东西打碎。
而基于仿真资产的智能体,可以在虚拟环境中先验地获得物理约束知识。它知道什么东西可以碰、什么东西不能碰、用力过猛会发生什么。它在进入真实世界之前,已经在仿真环境中经历了成千上万次的"失败",学会了遵守物理世界的规则。
这种"先仿真后真实"的设计模式,正在成为具身智能开发的新范式。
从平台架构到产业落地,仿真资产驱动的物理AI应用已经开始显现价值。接下来,我们通过几个典型的落地场景,看看这一范式转变具体如何转化为实际的生产力。
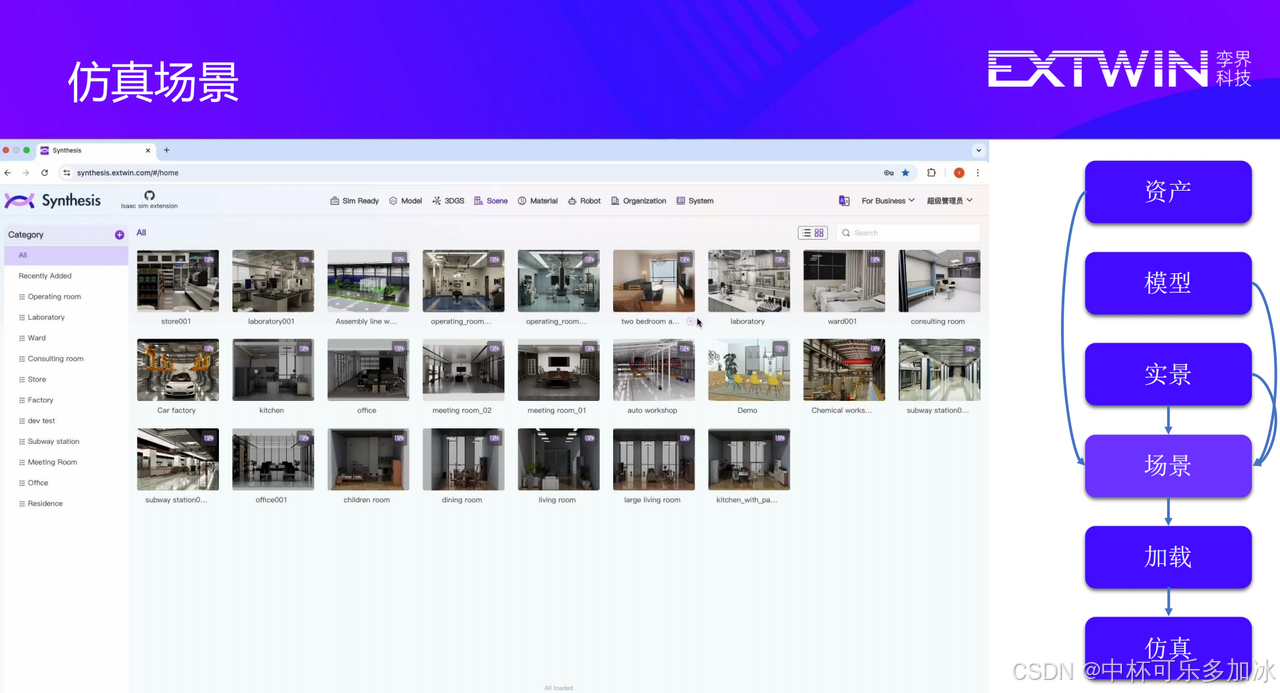
六、场景落地:仿真资产驱动的物理AI应用
仿真资产的价值,最终要落在具体的应用场景中才能真正兑现。

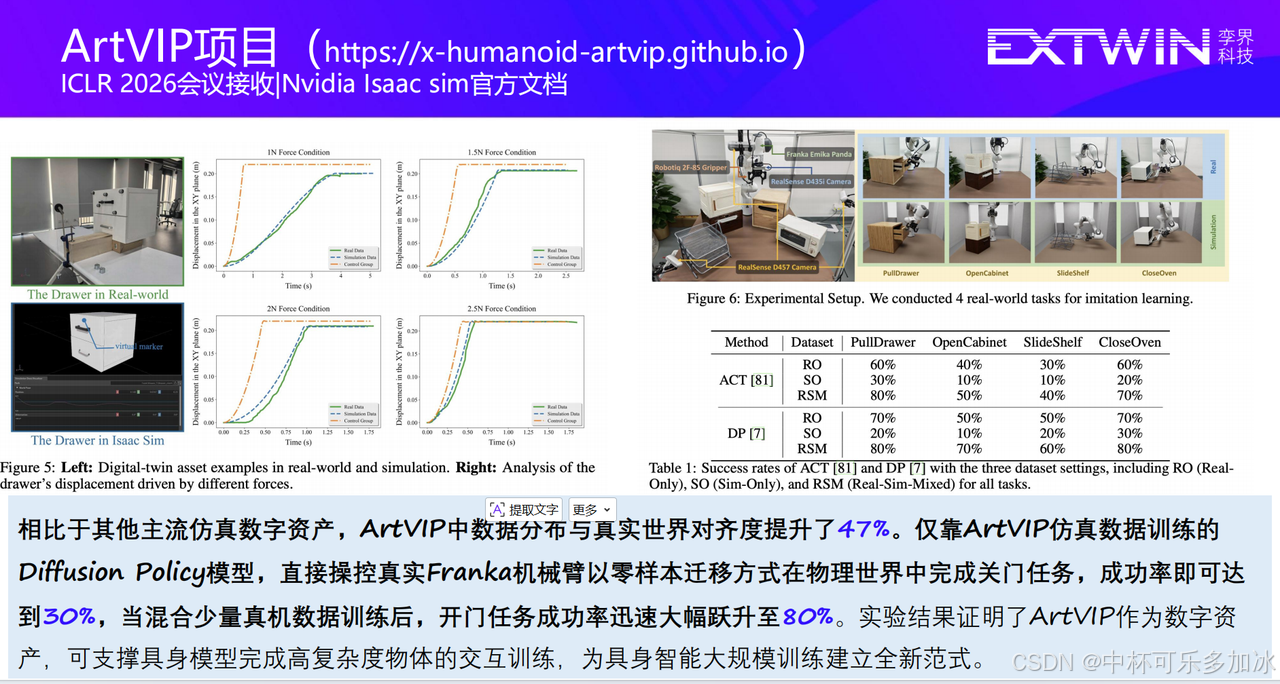
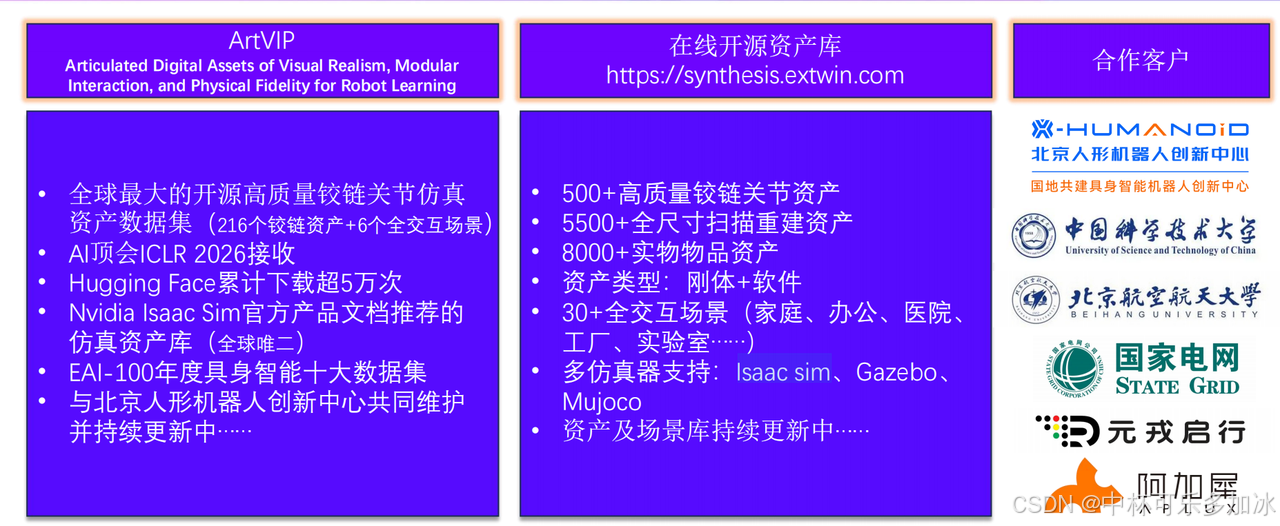
在具身智能领域,ArtVIP数据集支撑Franka机械臂零样本迁移任务成功率从30%跃升至80%,解决训练数据"量+质"双重困境,支撑机器人本体在虚拟环境中先验地获得物理约束知识,实现"先仿真后真实"的训练范式。
在重大工程领域,Synthesis孪生物理仿真平台支撑从设计验证到运营优化的全生命周期。参与引江济淮、滇中引水、环北部湾水资源配置等国家重大水利工程,以及大兴机场、首都机场T1T2T3改造工程等交通枢纽项目。通过内建的物理引擎,实现全场景可交互、可模拟、可仿真和行为可预测,为工艺模拟、设施设备运行提供数据支撑。
在工业制造领域,衍像平台的仿真能力正在重新定义工业生产的验证流程。基于物理引擎的仿真环境,支持从工艺模拟到设施设备运行的全流程仿真,覆盖Isaac Sim、Gazebo、Mujoco等多个主流仿真器。工厂产线可以在虚拟环境中进行高保真度的验证测试,无需等待真实设备调试;设备故障演练可以在仿真环境中反复进行,不影响实际生产。仿真集群环境支持大规模并行仿真任务,大幅缩短验证周期。
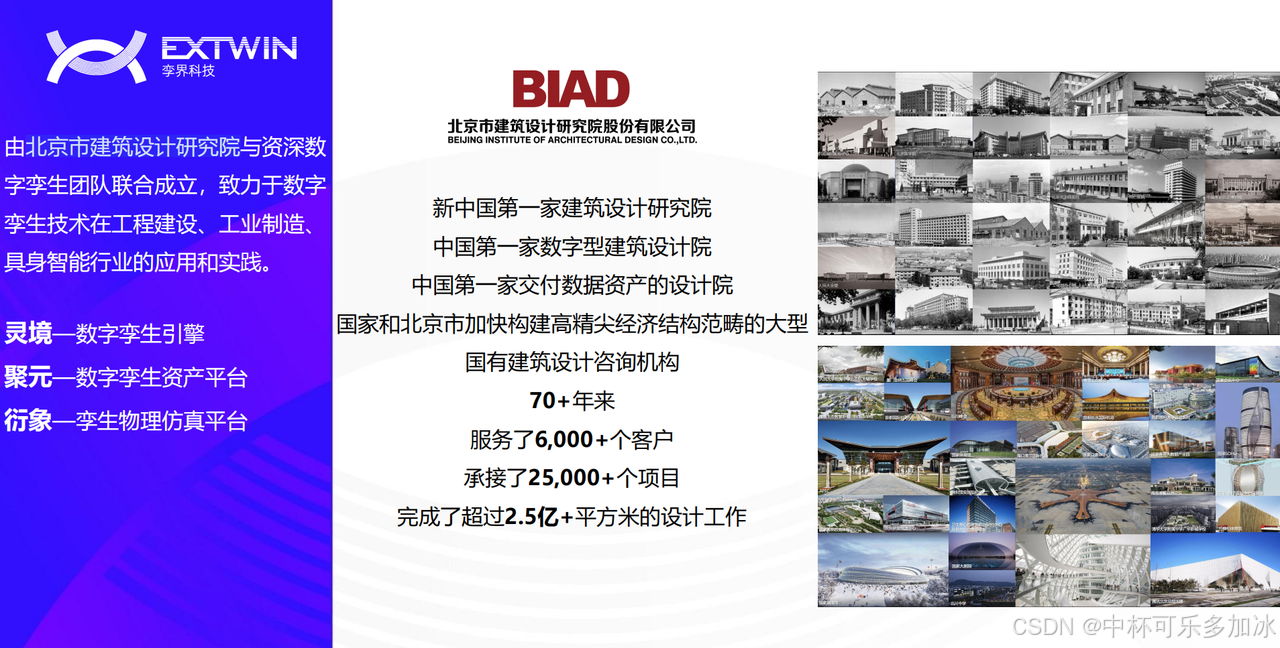
在建筑设计领域,作为中国第一家数字型建筑设计院,北京市建筑设计研究院拥有10余年数字孪生经验,依托完整的仿真资产生产链,为建筑设计提供可信的仿真验证能力。设计师在概念设计阶段就能快速进行结构性能评估,在方案比选时进行多物理场综合分析,从节能设计到声学设计,从日照分析到风环境评估,一切都可以在同一平台上有机融合。
七、结语:仿真资产是AI理解物理世界的“第一性原理”
过去几十年,“软件吞噬一切"成为产业共识。互联网公司用数据驱动的方式改造了一个又一个行业。但当同样的方法论被试图用于改造物理世界时,遇到了一个根本性障碍:物理世界不像互联网世界那样可以被"数字化”,它有自己不可违背的规律。机器人不会因为你的算法足够好就能抓起一个从未见过的物体,除非它真正理解了"抓起"这个动作背后的物理本质。
仿真资产不仅重构了数字孪生的价值锚点,更为物理AI提供了可控、可复现、可大规模并行测试的训练场。它让机器人从"死记硬背"进化到了"理解物理" ,从执行指令进化到了具备"物理直觉"。
展望未来,随着仿真资产的民主化进程,开源ArtVIP数据集、开放衍像平台与开放生态的建立,物理AI时代的数字基础设施建设需要产业各方共同参与。设计院带来专业领域的物理知识,科技企业提供工程化能力,科研机构探索前沿边界。
当这一天到来时,我们或许会看到这样的场景:机器人在进入真实工厂之前,已经在虚拟环境中完成了成千上万次的任务训练;工程师只需要用自然语言描述需求,系统就能自动配置合适的仿真场景并返回优化建议;不同厂商生产的仿真资产可以无缝协作,整个行业形成真正的"零件超市"。打破虚实界限,让现实物品在数字世界真正"觉醒",这或许是我们这一代人最激动人心的技术使命。


















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












