




一、Park 变换简介
硬件资料和FOC框架可以见之前的博客https://blog.csdn.net/debug_like/article/details/157386716?spm=1001.2014.3001.5502

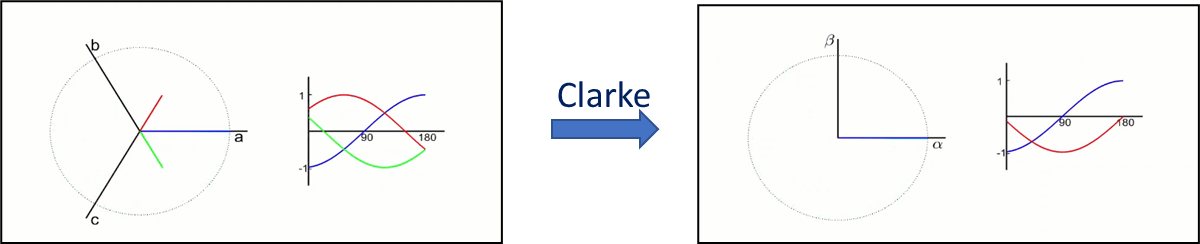
从Clarke到Park
Clarke 变换已将三相(a、b、c)电流简化为两相(α、β)正交电流,成功实现 “降维”。但 α、β 坐标系是静止不动的,对应的电流波形仍为随时间变化的正弦波(非线性特性),这给后续的线性控制(如 PID 调节)带来了不便 —— 非线性信号难以通过简单的比例积分运算实现高精度闭环控制。
而 Park 变换的核心作用,就是解决这一问题:将 α、β 两相静止坐标系中的交流信号,进一步变换到随电机转子同步旋转的 d-q 坐标系中,让非线性的正弦信号转化为恒定不变的直流信号,实现 “交流转直流” 的线性化处理。
从Clarke到Park
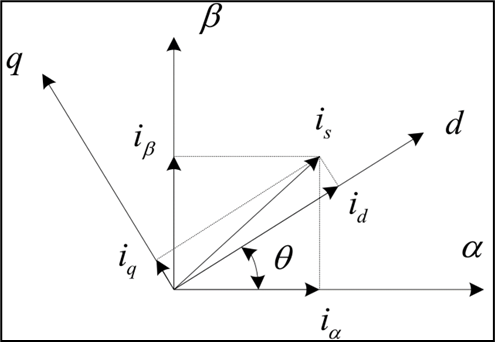
Park 变换本质是 “坐标旋转投影”,Park变换可以将电机从两相静止坐标系变换到随转子转动的坐标系(dq轴)
- d 轴(直轴):通常对齐转子永磁体的磁链方向(相当于 “磁场的北极方向”);
- q 轴(交轴):垂直于 d 轴,是产生电磁转矩的核心轴(相当于 “推动转子转动的力的方向”);
- 优势:在该坐标系下,原本交变的 α、β 电流会转化为恒定的 Id(d 轴电流)和 Iq(q 轴电流),后续控制可直接通过线性的 PI 调节器实现高精度控制。
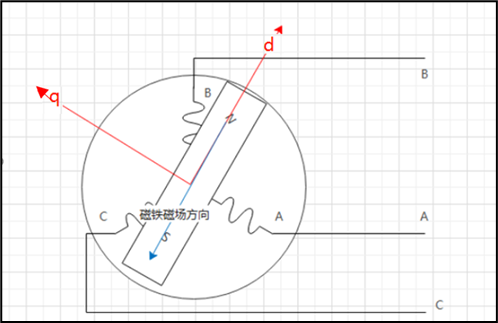
dp轴的示意图
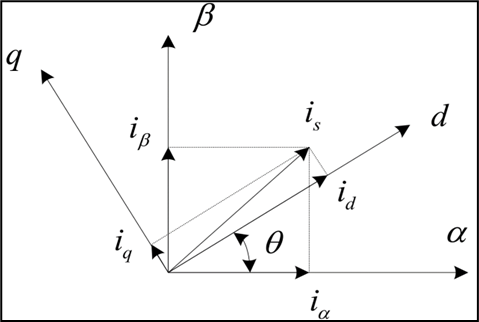
d - q 坐标系
二、推导 PARK 变换
- 输入信号:Clarke 变换输出的 α、β 两相电流(或电压);
- 已知参数:转子实时旋转角度 θ(可通过霍尔传感器、编码器等硬件检测获取);
- 变换目标:将 α、β 静止坐标系信号,投影到随转子旋转的 d-q 坐标系,得到恒定直流信号 Id、Iq。
![]()
![]()
三、反Park变换简介
Park 变换将信号从 “静止域” 转入 “旋转域” 以实现线性控制,而 SVPWM 调制算法的输入要求是 α、β 两相静止坐标系的信号(需基于静止域合成电压空间矢量)。因此,反 Park 变换需将经过 PI 调节后的 d-q 坐标系直流信号(Vd、Vq),重新转换回 α、β 两相静止坐标系的交流信号,为后续 SVPWM 调制提供符合要求的输入。
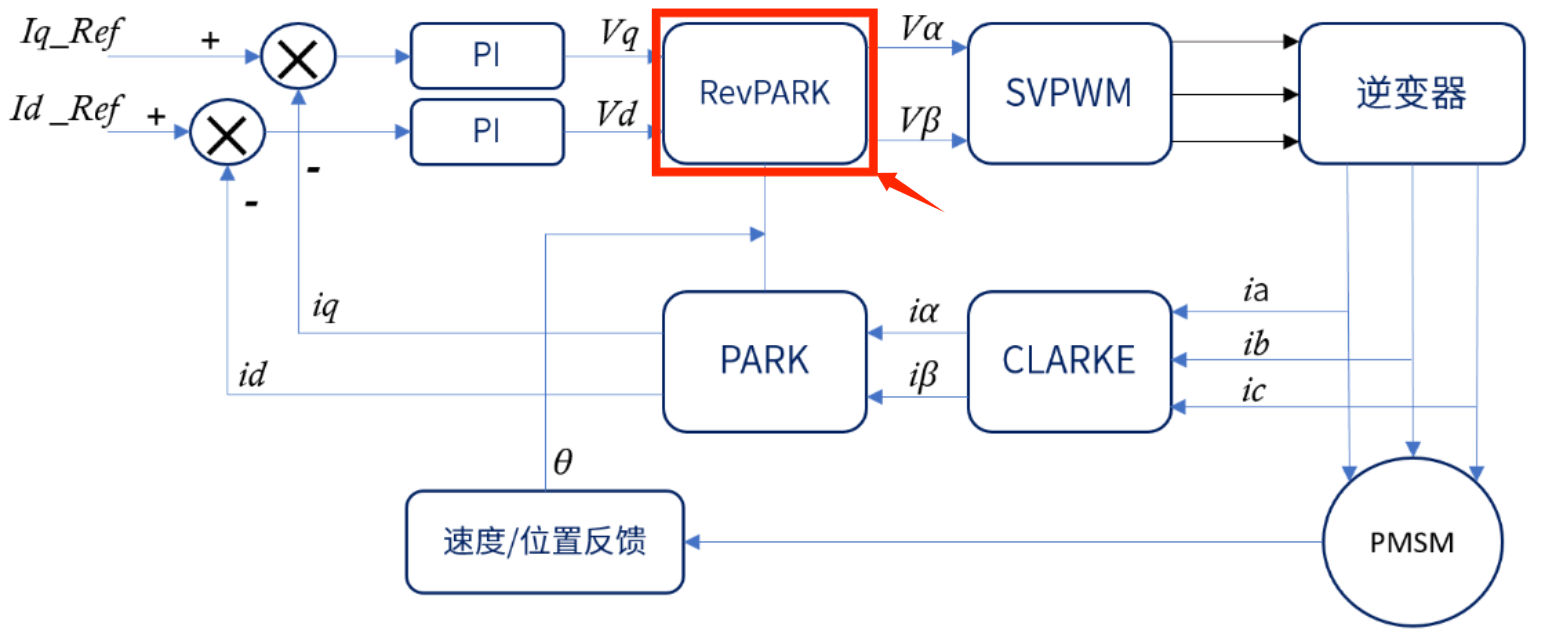
SVPWM算法的实现需要用到静止的坐标系α,β
α,β坐标系
四、推导反 PARK 变换
- 输入信号:PI 调节器输出的 d-q 坐标系直流电压 Vd、Vq;
- 关键参数:与 Park 变换一致的转子实时角度 θ(保证变换的对称性);
- 变换目标:将 d-q 旋转坐标系的直流信号,反向投影到 α、β 静止坐标系,得到交流信号 Vα、Vβ,适配 SVPWM 算法需求。
![]()
![]()
五、思考
这些变换是否改变了信号类型,一会用电压表示一会用电流表示?
Clarke/Park/ 反 Park 本质是 “坐标投影工具”,不区分信号类型 —— 电流、电压都是 “矢量信号”,只要遵循同一套变换规则,就能实现坐标转换,之所以交替出现,是 FOC 闭环控制的流程需求。
电流信号是 “反馈值”:用来判断 “电机当前状态”,所以先通过 Clarke/Park 变换,把它变成容易控制的直流信号;
电压信号是 “控制指令”:用来修正 “电机状态偏差”,所以通过反 Park 变换,把修正后的指令转成 SVPWM 能识别的格式。


















 800
800

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










