




目录
一、硬件资料
主要参考惠驱动原理图资料设计开发
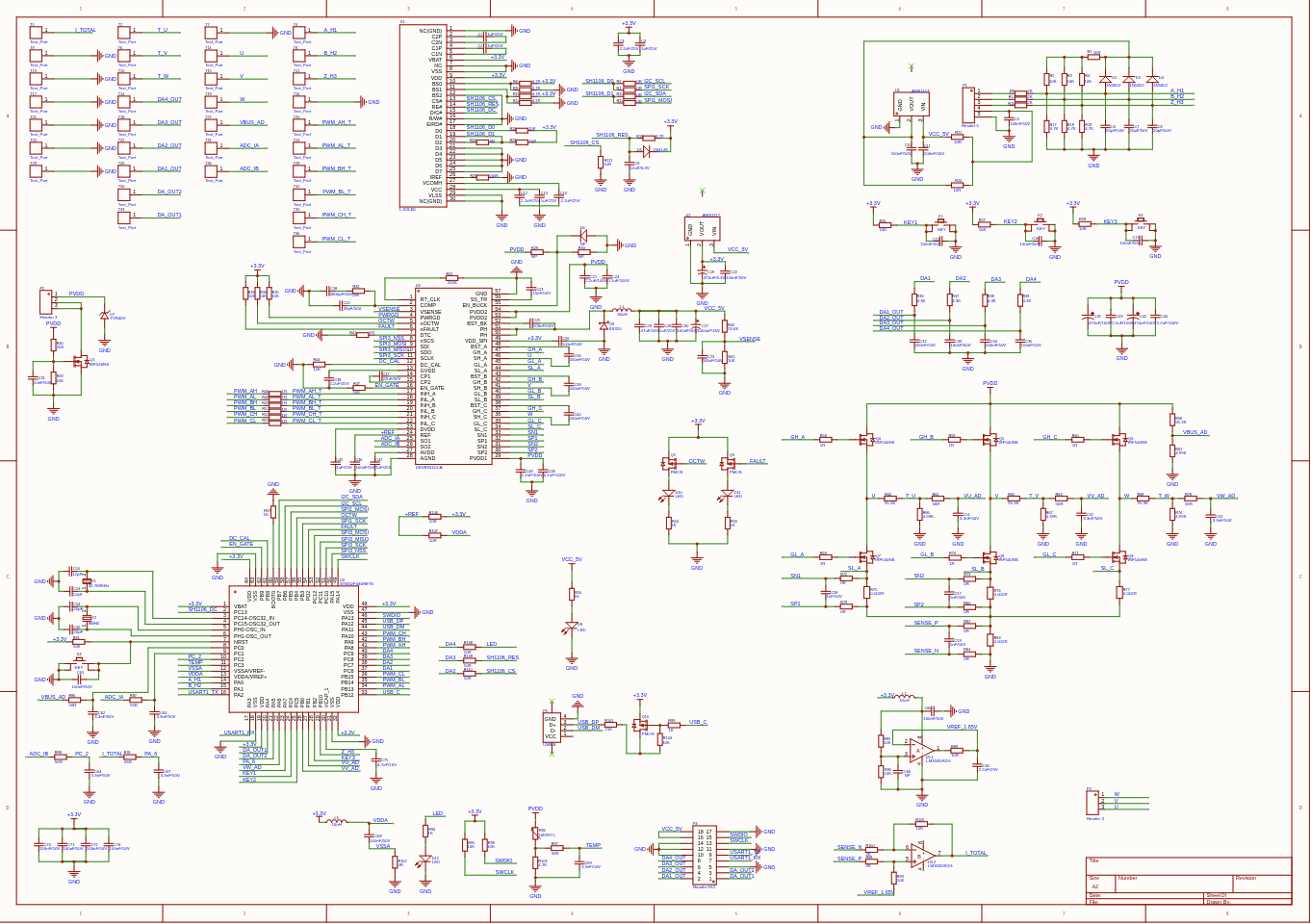
由于慧驱动开发板FOC 驱动板因尺寸超 10x10cm,超出嘉立创免费打样范围,重新布局走线,设计了一款 10x7.5cm 的 4 层板,目前已完成设计进入验证阶段。以下是核心调整内容及关键设计注意事项:
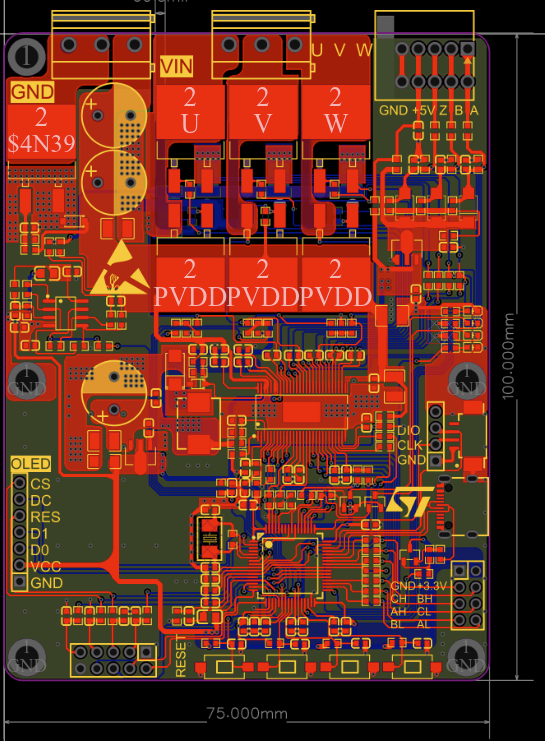
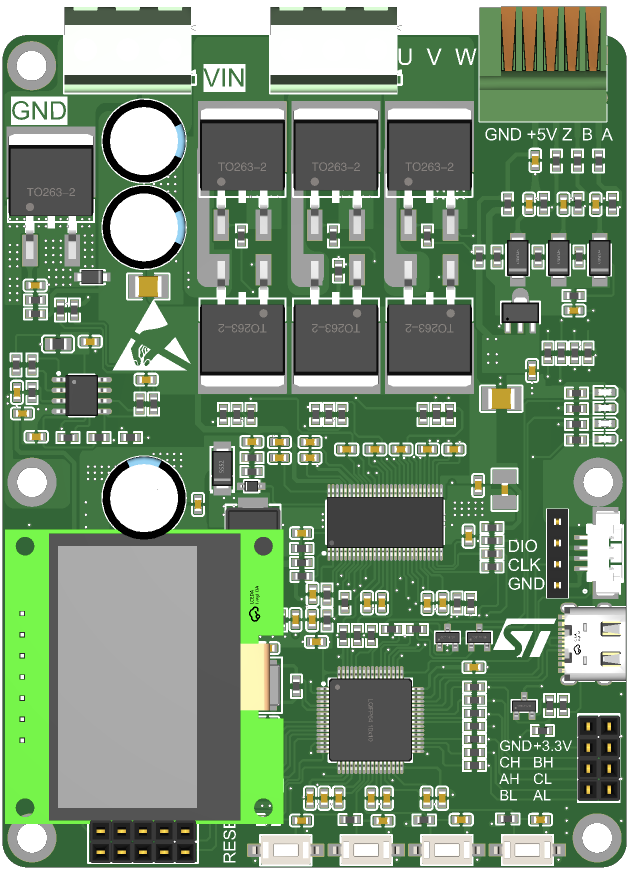
1.1 核心设计调整
1、尺寸优化适配免费打样:将原板尺寸压缩至 10x7.5cm(符合嘉立创 4 层板免费打样规格)
2、功能与元器件调整:
- 阉割左上角非核心测点,简化板卡布局,聚焦核心控制功能;
- 1.3 寸 OLED 屏改为插件式设计,降低贴片难度,同时提升安装稳定性;
- 上位机通信接口由原接口替换为更通用的 Type-C 接口,兼容性更强、插拔更便捷;
- 对部分非关键元器件进行参数微调,适配新布局的空间与电气需求。
1.2 关键设计注意事项(避坑指南)
1、采样电阻:开尔文连接 + 等长布线是关键
电流采样精度直接影响 FOC 算法性能,需重点关注:
- 必须采用开尔文连接法(参考:https://blog.csdn.net/weixin_50120208/article/details/156368349),通过四线分离设计,彻底消除导线电阻、接触电阻及铜箔压降带来的误差(尤其 mΩ 级采样电阻,铜箔压降可能导致 10% 以上误差);
- 采样信号线需严格等长布线,确保差分信号同步性,本版因布局紧凑未做好等长,后续迭代需重点优化。
2、MOS 管散热与布线
- 功率 MOS 管区域需做开窗处理,焊接时额外加锡,增强过流能力与散热效果,避免大电流工况下过热;
- MOS 管下方禁止走任何信号线、禁止铺地,防止功率回路的干扰窜入信号层,同时避免散热对信号线造成影响。
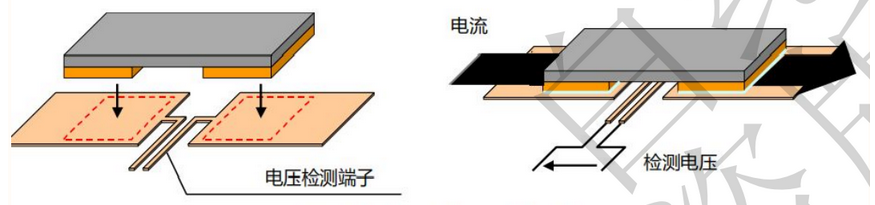
开尔文连接法
硬件参考
二、FOC框架
2.1 什么是FOC
FOC( Field Oriented Control )直译即磁场定向控制,又称为磁场矢量控制(VC,Vector Control)
FOC特点:通过精确地控制磁场大小与方向,使得电机的运动转矩平稳、噪声小、效率高,并且具有高速的动态响应
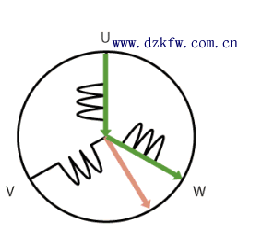
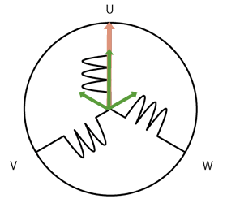
foc示意图
六步换相&FOC控制方式差异
| 控制方式 | 优点 | 缺点 |
| 六步换相 | 控制算法相较简单 | 精度差、运转不流畅、 转矩波动大、存在一定的电流噪声、适用于对电机转动性能要求不高的场合 |
| FOC | 转矩平稳、效率高、噪声小、动态响应快 | 硬件成本较高、对MCU性能有较高要求、控制算法难度大。 |
2.2 FOC框图
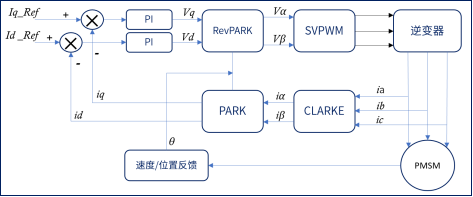
- 对电机三相电流进行采样得到:ia、ib、ic
- 将ia、ib、ic经过clarke变换得到iα、iβ
- 将iα、iβ经过park变换得到iq、id
- 计算iq、id和其设定值iq_Ref、id_Ref的误差
- 将上述误差输入到两个PID(只用到PI)控制器,得到输出的控制电压Vq 、 Vd
- 将Vq 、 Vd进行反park变换得到Vα、Vβ
- 将Vα、Vβ合成电压空间矢量,输入SVPWM模块进行调制,输出该时刻三个半桥的开关状态
波形角度看

- 三相定子电流Ia、Ib、Ic波形 → Clarke 变换 → α、β 两相静止坐标系正交波形
- α、β 交流波形 → Park 变换(交转直)→ id、iq 旋转坐标系直流波形
- PID 调节 id、iq 直流波形,输出校正后 ud、uq 指令
- 校正后 ud、uq波形 → 反 Park 变换 → 新 α、β 交流波形
- 新 αβ 波形 → SVPWM → 三相 PWM 脉冲波形(驱动 MOS 管)
电机学习硬件资料还在验证后续学习FOC控制文章持续更新
主要参考资料
1、慧驱动
2、正点原子电机控制



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










