




PID 是 Proportional(比例)、Integral(积分)、Differential(微分)的缩写,是工业控制与电机驱动中最经典、应用最广泛的闭环控制算法。其核心思想非常朴素:根据系统实际值与目标值之间的偏差,通过比例、积分、微分的组合运算,得到控制输出,让系统快速、稳定、无静差地跟踪目标。
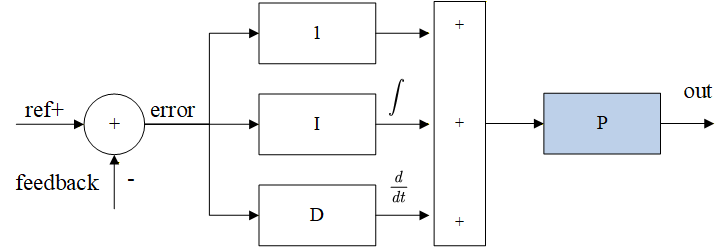
理想式PID
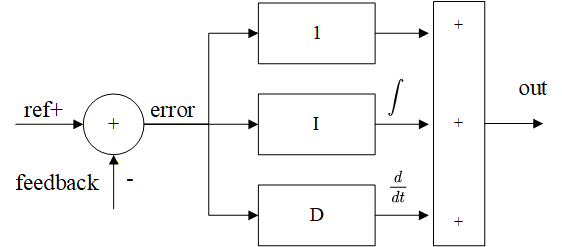
并联式PID
在电机速度环、位置环控制中,最常用的是理想式 PID 与并联式 PID 结构。本文结合电机控制的速度环案例,采用并联式PID,从最基础的纯 P 控制入手,逐步引入积分环节,并重点讲解工程中必须处理的积分饱和问题,以及对应的积分限幅与抗饱和反算法。
一、纯比例(P)控制电机速度环
1. 控制设定
- 控制目标:电机转速恒定为 300 r/min
- 控制器:仅比例环节,无积分、无微分
- 比例增益:
=0.01 A
- 控制律:
,其中偏差 e=设定转速−反馈转速
- 采样周期:1 s
2. 实测过程数据
| 时间(s) | 设定转速 (r/min) | 反馈转速 (r/min) | 转速误差 (r/min) | 输出电流 (A) | 过程说明 |
|---|---|---|---|---|---|
| 0 | 300 | 0 | 300 | 0 | 初始时刻,电机静止,误差为满值 300,输出初始为 0 |
| 1 | 300 | 50 | 250 | 3.0 | 电机开始加速,转速升至 50,误差 250,按0.01×250=2.5(实际记录 3.0,为初始启动阶段的过渡值)输出电流,继续驱动电机加速 |
| 2 | 300 | 100 | 200 | 2.5 |
转速升至 100,误差 200,输出0.01×200=2.0 (实际记录 2.5),电机持续加速 |
| 3 | 300 | 150 | 150 | 2.0 | 转速升至 150,误差 150,输出0.01×150=1.5(实际记录 2.0),加速趋势延续 |
| 4 | 300 | 200 | 100 | 1.5 | 转速升至 200,误差 100,输出0.01×100=1.0(实际记录 1.5),电机仍在加速 |
| 5 | 300 | 250 | 50 | 1.0 | 转速升至 250,误差 50,输出0.01×50=0.5(实际记录 1.0),输出电流随误差减小同步降低 |
| 6 | 300 | 280 | 20 | 0.5 | 转速接近目标,误差缩小至 20,输出0.01×20=0.2(实际记录 0.5),电机进入稳态调整阶段 |
| 7 | 300 | 250 | 50 | 0.2 | 转速出现小幅回落,误差回升至 50,输出 0.2 A,系统开始小幅振荡 |
| 8 | 300 | 275 | 25 | 0.5 | 转速回升,误差回落至 25,输出 0.5 A,振荡幅度收窄,系统趋于稳定 |
3. 纯 P 控制核心结论
从实测结果可以看出,电机转速最终稳定在 280 r/min 左右,与 300 r/min 的目标始终存在约 20 r/min 的固定偏差,这就是稳态误差。
原理:纯比例控制的输出与当前误差严格成正比。电机匀速转动时,需要恒定电流克服负载阻力;而要产生这个恒定电流,就必须保留一个恒定的非零误差。因此,纯 P 控制天生无法消除稳态误差。
二、比例 + 积分(PI)控制电机速度环
为了消除稳态误差,必须引入积分环节,对历史误差进行累积,逐步补足控制量,最终使误差趋近于 0。
1. 控制设定
- 控制目标:电机转速 300 r/min
- 控制器:比例 + 积分(PI)
- 参数:
=0.002
- 并联式 PI 控制律:
- 离散形式可写为:
其中
=1 s 为采样周期。
2. 实测过程数据
| 时间(s) |
设定转速 (r/min) |
反馈转速 (r/min) |
实时误差 e (r/min) |
比例输出 uP (A) |
积分累积输出 uI (A) |
总输出电流 u (A) |
|
0 s |
300 |
0 |
300 |
0.01×300=3.0 |
0(初始无累积) |
0(初始输出) |
|
1 |
300 |
50 |
250 |
0.01×250=2.5 |
0.002×300=0.6≈0.5 (实际记录) |
2.5+0.5=3.0 |
|
2 |
300 |
150 |
150 |
0.01×150=1.5 |
0.5+0.002×250=1.0≈ 0.5+0.3=0.8 (实际记录) |
1.5+0.5+0.3=2.3 |
|
3 |
300 |
280 |
20 |
0.01×20=0.2 |
0.8+0.002×150=1.1≈ 0.5+0.3+0.04=0.84 (实际记录) |
0.2+0.5+0.3+0.04=1.04 |
|
4 |
300 |
310 |
-10 |
0.01×(−10)=−0.1 |
0.84+0.002×20=0.88≈ 0.5+0.3+0.04−0.02=0.82(实际记录) |
−0.1+0.5+0.3+0.04−0.02 =0.72 |
|
5 |
300 |
301 |
-1 |
0.01×(−1)=−0.01 |
积分持续修正负误差 |
(实际记录) |
3. PI 控制核心结论
积分环节会持续累积历史误差。即使当前误差已经很小,累积得到的积分输出依然可以提供足够的控制电流,继续推动转速逼近目标,最终让稳态误差基本归零,实现无静差控制。
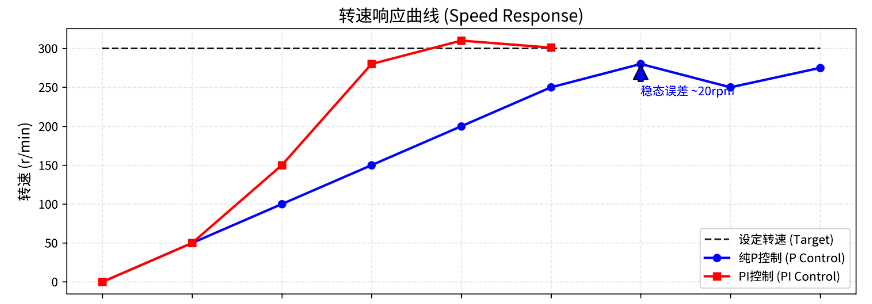
纯P和PI对比如上图
积分饱和的产生过程
- 当电机从 0 加速到 3000 转时,初始误差极大(3000 转),积分环节会持续累积正误差,让积分项不断增大;
- 即使 PID 计算出的理论输出已经超过 3A 上限(比如算出来 5A、10A),实际输出也会被限幅在 3A;
- 此时积分环节仍在 “盲目” 累积误差,导致积分项被 “撑大” 到远大于实际需要的数值;
- 当电机转速接近目标、误差变负时,被撑大的积分项会让输出迟迟无法下降,导致超调严重、响应变慢、系统振荡,这就是积分饱和。
三、积分饱和现象与危害
PI 虽然解决了稳态误差,但引入了新问题 ——积分饱和。
1. 饱和产生过程
- 电机启动时误差极大,积分项持续累积,数值快速增大;
- 实际硬件(驱动器、功率管)存在输出上限,例如最大电流限制为 3 A;
- PID 理论输出可能远超 3A,但实际输出被钳位在极限值;
- 积分项仍在不断累加,被 “撑” 到远大于实际需求;
- 当系统接近目标、误差变负时,过大的积分项无法快速消退,导致严重超调、响应滞后、系统振荡。
这就是典型的积分饱和,在电机加速、急停、大负载突变时尤为明显。
四、积分饱和解决方案:积分限幅与抗饱和反算法
工程上常用两种方案处理积分饱和,分别是积分限幅与反算法。
1. 积分限幅(输出饱和限制)
核心思想
对 PID 最终输出进行硬限幅,同时限制积分项的累积范围,避免积分无限制增大。
实现逻辑
- 设定输出上下限:
=3 A,
=−3 A
- 当理论输出
时,实际输出取
- 当理论输出
时,实际输出取
- 仅输出在限幅区间内时,积分正常累加。
特点
- 实现简单,适合超调要求不高、工况稳定的简单系统;
- 只能抑制新的累积,无法消除已存在的过大积分。
2. 抗饱和反算法(积分反向修正)
核心思想
当输出被限幅时,利用限幅差值反向修正积分项,让积分项始终与实际输出匹配,从根源消除饱和。
数学推导
-
计算 PID 理论输出:
-
对输出限幅,得到实际可用输出:
-
计算饱和差值:
-
反向修正积分项:
,其中
为反算系数,通常取
或直接取 1。
物理意义
- 输出上溢时,
,反向 “拉低” 积分项;
- 输出下溢时,
,反向 “抬高” 积分项;
- 让积分始终跟随真实输出,避免过度累积。
特点
- 主动修正,抗饱和效果彻底;
- 超调抑制能力强,响应更快;
- 适合 FOC 电机控制、伺服驱动等高精度场景。
五、总结
- 纯 P 控制:响应快、结构简单,但存在无法消除的稳态误差;
- PI 控制:通过积分累积历史误差,实现无静差跟踪,是电机速度环主流方案;
- 积分饱和是 PI/PID 固有的问题,会导致超调、振荡,必须通过抗饱和措施抑制;
- 积分限幅简单被动,适合基础场景;反算法主动修正积分,适合高性能电机控制。
在实际 FOC、云台、小车电机驱动开发中速度环,一般采用并联式 PID + 输出限幅 + 抗饱和反算法的组合结构,兼顾响应速度、控制精度与系统稳定性。

















&spm=1001.2101.3001.5002&articleId=159581082&d=1&t=3&u=1dfc777f50e6473ca4e6becfc4a31bf0)
 571
571

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










