



一、产品概述
- A-59U 是一款高性能、工业级、带 USB 声卡的双通道数字语音处理模块,专为各类免提全双工通话、语音交互、远程对讲设备设计,一站式解决回音、噪音、拾音近、人声杂、双麦干扰等行业痛点。模块集成超强回音消除(AEC)、环境噪音压制(ENC)、远场自动增益(AGC)、双麦双波束定向拾音(BF) 四大核心声学算法,搭配 USB 免驱、数模双路输出、宽温稳定、小体积易集成等优势,是门禁对讲、车载通讯、会议系统、安防广播、智能家
 居等设备的理想语音核心方案。
居等设备的理想语音核心方案。
二、核心功能与性能优势
1. 超强回音消除,近距大音量无回声 回音消除指标高达100dB,可消除100ms空间延迟回音 喇叭音量95dB、麦克风距喇叭1cm仍完全屏蔽回声 结构合理条件下,麦距喇叭<6cm、喇叭音量>100dB依然稳定消回音 全双工通话流畅不卡顿,语音识别准确率大幅提升
2. 深度环境降噪,人声更纯净 最佳状态有效降噪45dB,强力抑制底噪、风噪、环境杂声 保留清晰人声,远距离通话依然干净通透 嘈杂车间、公共场所、户外门禁等场景依然稳定适用
3. 远场拾音,大空间全覆盖 支持远场拾音程序,标准麦克风拾音范围50cm–500cm 自动增益控制(AGC),远近声音均衡输出 会议室、教室、大厅、大堂等大空间拾音轻松满足
4. 双麦双波束,双人独立拾音识别 双独立拾音波束,覆盖两个不同方向,角度可定制调整 双声道独立输出,互不干扰,支持双人同时通话、双人独立语音识别 波束有效区、跟踪区、屏蔽区可通过固件参数灵活设定 面对面双人拾音、定向对讲、多人交互场景专用
5. USB 免驱声卡,即插即用更便捷 集成标准 USB 声卡功能,Windows/Android/ 主流 Linux(树莓派、Ubuntu)免驱直连 USB 同时供电 + 音频传输,布线极简,开发更快 硬件音量 ± 按键,对地触发直接控制播放音量 USB 监听输出可直连功放,适配电脑、安卓设备、开发板快速调用
6. 数模双路同步输出,适配所有系统 I²S 数字音频 + LINE OUT 模拟音频同时独立输出 双声道全分离,上行下行通道独立,互不串扰 下行音频可做消回音参考,消回音效果更彻底 兼容现有成品板改造与全新主板设计
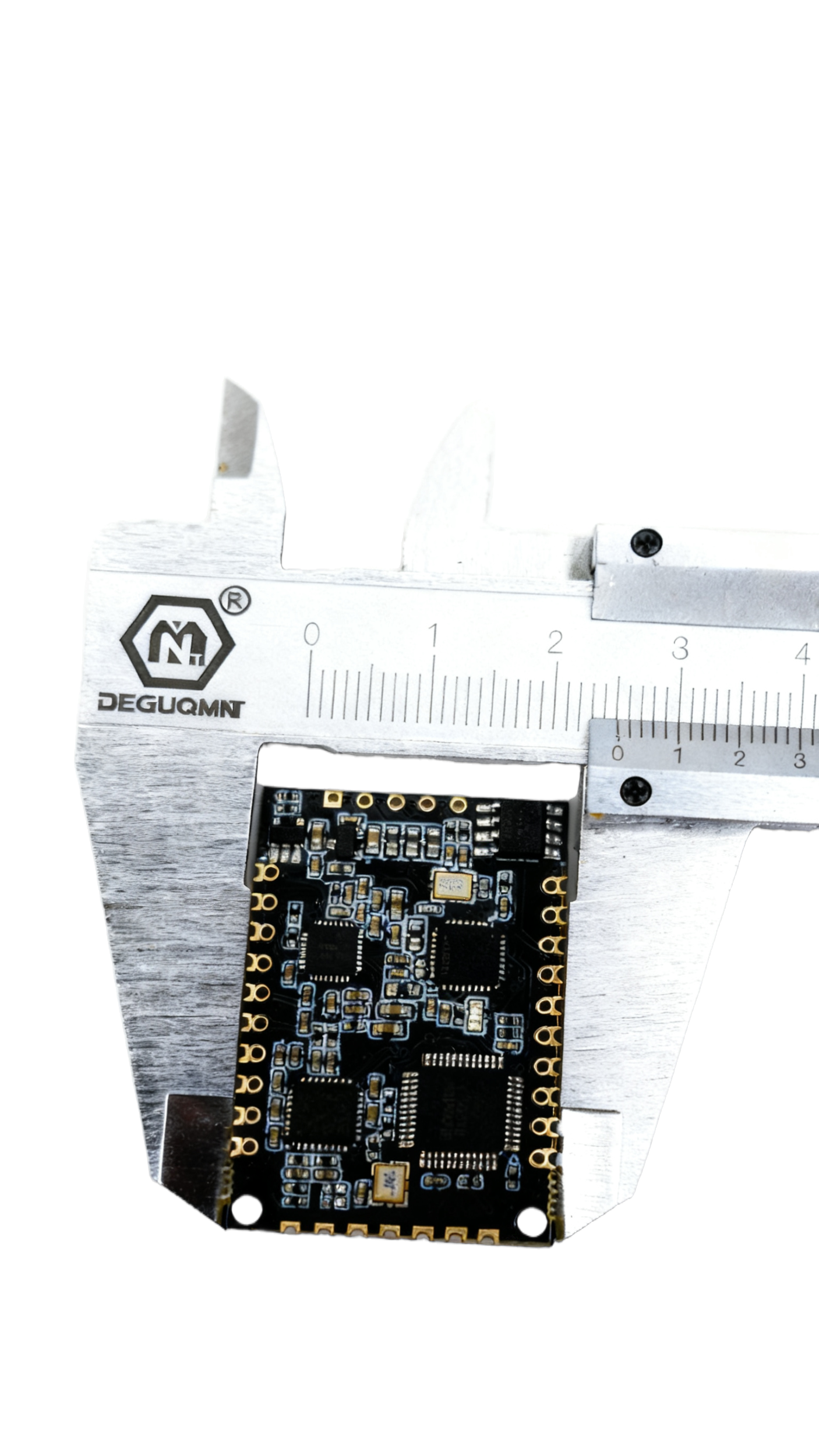
7. 工业级品质,严苛环境稳定运行 工作电压:4V–6.5V,支持 USB 直接供电 工作电流:35–60mA,低功耗长寿命 工作温度:-40℃ ~ +85℃,真正工业级宽温 工作湿度:≤90%(无凝露),高湿环境可靠工作 体积小巧:37mm×25mm,半孔焊盘设计,可贴片 / 转接板接入
三、产品核心亮点总结
双麦双波束 + 双独立通道:双人同时拾音、独立识别、独立输出
近距超强消回音:麦贴喇叭仍无回声,大音量不破音
USB 免驱:电脑 / 安卓 / Linux 即插即用,开发零门槛
数模双输出:兼容新旧设备,改造 / 设计都方便
远场 + 降噪:5 米远距离清晰拾音,降噪 45dB
工业级宽温:-40℃~85℃,车载、户外、工业场景全覆盖
小体积易集成:37×25mm,半孔工艺,批量生产更简单
四、典型应用场景
1. 智能对讲类 小区 / 别墅门禁对讲、智能家居对讲、楼宇对讲 医院 / 监狱 / 养老院呼叫对讲系统 电梯、写字楼、生产车间广播对讲、监听系统
2. 车载与移动设备 车载蓝牙通话、车载语音交互、车载降噪麦克风 工程机械、叉车、警车等强噪音环境通话设备
3. 会议与教育 企业远程会议、视频会议麦克风 在线教育、多媒体教室、录播拾音设备
4. 安防与公共服务 安防监控对讲、矿山 / 矿井紧急呼叫报警 银行客服通话、停车场 / 自助终端对讲 公共场所广播、无人设备语音交互
5. 智能交互类 虚拟人偶对话、语音识别机器人、智能音箱 双人面对面交互、定向拾音记录设备
五、适用人群与价值
方案商 / 设备厂商:快速提升产品音质,降低开发难度,缩短上市周期
工程师 / 开发者:接口丰富、免驱、数模兼容,调试简单,稳定可靠
终端用户:通话无回音、无噪音、远距离清晰,使用体验大幅提升


















 731
731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










