




一、设置寻路范围
1.将 体积/Nav Mesh Bounds Volume 拖拽到场景中

2.选中拖入的NavMeshBoundsVolume,调整大小,将想要自动寻路的范围全部包裹。(尽量比场景轮廓大一点)


3.选中NavMeshBoundsVolume,按P查看寻路情况,再次按P消失。

二、编辑寻路AI
1.创建机器人蓝图类,基于Character类创建,命名为RobotShooter,主要赋值一个mesh,然后调整好旋转角度。
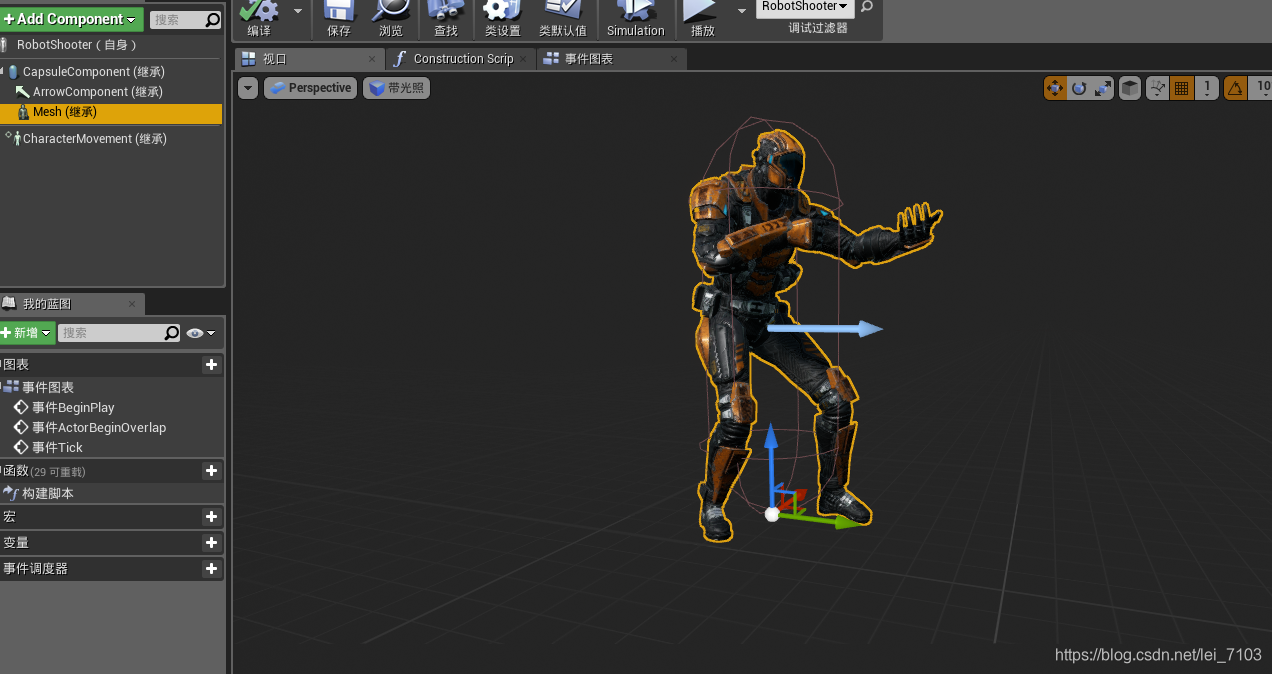
2.创建动画蓝图,选择基于机器人对应的骨骼,创建完成后命名
低功耗蓝牙项目,需要一块懂省电的板
思澈 SF32LB52 芯片,BLE 协议栈深度优化,上手即开发
一、设置寻路范围
1.将 体积/Nav Mesh Bounds Volume 拖拽到场景中
2.选中拖入的NavMeshBoundsVolume,调整大小,将想要自动寻路的范围全部包裹。(尽量比场景轮廓大一点)
3.选中NavMeshBoundsVolume,按P查看寻路情况,再次按P消失。
二、编辑寻路AI
1.创建机器人蓝图类,基于Character类创建,命名为RobotShooter,主要赋值一个mesh,然后调整好旋转角度。
2.创建动画蓝图,选择基于机器人对应的骨骼,创建完成后命名
低功耗蓝牙项目,需要一块懂省电的板
思澈 SF32LB52 芯片,BLE 协议栈深度优化,上手即开发
 3945
6010
5524
3862
1561
3945
6010
5524
3862
1561

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























第三十一课设置自动寻路并使用寻路AI&spm=1001.2101.3001.5002&articleId=100010427&d=1&t=3&u=5debcc4faf0a4a0cb7f7fd52409e31c3)





